 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹
我們的項目是在 kilobot 的基礎上制作一個機器人,并添加一個自主充電系統和一個更好的定位系統。該程序是工業項目的一部分,索邦理工大學作為工業部門,智能系統和機器人研究所 (ISIR) 作為客戶。
該團隊由 Polytech Sorbonne 的五名學生組成:
- 羅曼博博特
- 瑞安·達內卡斯
- 馬修·古里雄
- 克里斯蒂安·哈格(項目經理)
- 瓦倫丁雷納爾
千洛機器人
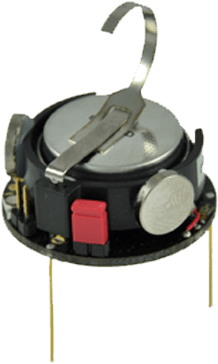
kilobot 是哈佛大學開發的一種移動設備。它是一個微型設備(直徑 33 毫米,高度 34 毫米),專為群體工作而設計。事實上,這些機器人是要成群結隊地運作的,多達一千個單位。它們主要用于實驗室目的以進行研究。
了解 kilobots
為了創建一個可以與實際的 kilobots 完全兼容的新機器人,我們首先需要了解它們的工作原理。我們將研究分為兩個主要部分:硬件一(電子原理圖)和軟件一(代碼)。
另一個重點是用于控制機器人的頂置控制器(OHC)。這就是使這個項目非常有趣的原因。事實上,OHC 允許您通過紅外線 (IR) 控制您的機器人,而無需將它們連接到您的計算機。您甚至可以直接通過它上傳您的代碼。
硬件
首先,讓我們來看看硬件部分。kilobots 原理圖可分為五個主要部分:
- 控制所有組件的微控制器(atmega328p)
- 發射器部分,由晶體管控制的 IR 發射 LED 組成。它允許 kilobot 發送消息
- 收據部分,由紅外線接收器組成。它允許 kilobot 接收消息。接收到的信號在被微控制器分析之前通過運算放大器進行過濾和放大
- 允許 kilobot 移動的兩個振動電機。
- 充當人機界面 (HMI) 角色的 RGB LED
軟件
要對您的 kilobot 進行編碼,您可以使用一個非常用戶友好的界面,它看起來很像 arduino 界面。有一個設置和一個循環功能。名為“kilolib”的庫為您提供了許多簡單的功能來設置 RGB LED 的顏色、發送或接收消息、讓機器人移動……
kilobot 在不同的狀態下工作,最重要的是:
- 運行狀態:執行您編寫的代碼
- 暫停狀態:什么都不做
- 睡眠狀態:睡眠
- 電壓狀態:表示電池電量
- 上傳狀態:上傳新代碼
這是 kilobot 最起碼的功能。我們現在的工作是創造一個新的機器人,它具有相同的行為,能夠與 kilobots 通信,但它也將具有以下新功能:
- 添加定位系統。事實上,目前 kilobot 只有一個接收器。即使它可以估計發送消息的其他機器人的距離,它也無法知道那個機器人在哪里。所以我們需要找到一種方法,這樣我們就能或多或少地知道我們正在說話的機器人在哪里。
- 打造自主充電系統。目前,當 kilobot 需要加油時,必須用手將其放在充電站上。這真的很煩人,尤其是當你有數百個機器人時。因此,我們的目標是創建一個“自主充電系統”,使千葉機器人無需操縱即可加油。
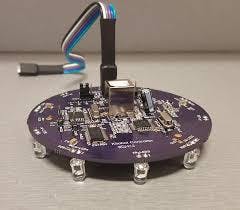
新定位系統
新的定位系統有 3 個紅外線接收器,因此他可以檢測來自 6 個不同方向的信息。此功能使我們能夠在每個 kilobot 收到的消息中獲得一個附加信息,即方向。因此,當這個新的 kilobot 收到一條消息時,它會為用戶提供三個有用的信息:
- Message :接收到的4字節數據內容。
- 距離:兩個通信千頭機器人之間的距離。
- Position : 發送 kilobot 的相對方向,精度為 60°。
該代碼位于:https ://github.com/kristianharge/projetIndustriel
原理圖附在這篇文章中。
自主充電系統
自主充電系統由一面墻組成,它會發出特定信息,因此 kilobot 會將墻識別為充電站。然后,如果電壓低,kilobot 將在競技場中搜索充電站,一旦找到,它就會嘗試靠近,直到檢測到它正在充電。
結論
這個項目真的很充實,我們了解了很多對我們所有人來說都是全新的不同技術。除了龐大的技術學徒期外,我們還在管理和團隊合作技能方面下了很多功夫。ISIR 研究實驗室正在繼續這項工作,他們希望大約在兩年內完成。
- Feather藍牙迷你機器人
- MoveThisWay自主機器人解決方案 0次下載
- 自主UVC消毒機器人開源
- ACR自主清潔機器人開源分享
- 迷你視頻錄制和流媒體機器人開源分享
- 自主輔助農業機器人開源
- 邊緣智能傳感可實現更智能的自主機器人
- Arduino Uno迷你機器人開源分享
- 自主機器人開源項目
- 全自主機器人垂直異構雙目視覺研究 0次下載
- 全自主機器人目標預測 0次下載
- 全自主機器人足球系統的研究綜述 0次下載
- 自主機器人足球系統的通信機制 0次下載
- 自主機器人避障方法研究 0次下載
- 全自主機器人雙目視覺運動檢測 0次下載
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 843次閱讀
- 自主機器視覺系統時面臨的復雜設計挑戰 268次閱讀
- 如何使用DonkeyCar平臺構建一個自主機器人 2114次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- 一文看懂服務機器人發展前景 2519次閱讀
- 邊緣智能傳感可實現更智能的自主機器人 696次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 仙知機器人自主研發用于移動機器人應用專業級客戶端軟件Roboshop 6069次閱讀
- 盤點機器人傳感器的類型及其作用 7743次閱讀
- 關于機器人傳感器的種類介紹 1.3w次閱讀
- 機器人自主充電座PCB圖和自主充電原理圖 9092次閱讀
- 自主移動機器人的定位與地圖創建(SLAM)關鍵性問題 1908次閱讀
- 機器人自主移動的秘密,從SLAM技術說起 2368次閱讀
- 機器人最實用的10種傳感器盤點 1.3w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 2Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統
- 0.85 MB | 1次下載 | 1 積分
- 5PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 6WTS-100(1.1) UWB 信標定位系統 彩頁
- 540.48 KB | 1次下載 | 免費
- 7DV2004S1/ES1/HS1快速充電開發系統
- 2.08MB | 1次下載 | 免費
- 8MATLAB繪圖合集
- 27.12 MB | 1次下載 | 5 積分
本月
- 1使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 2UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 15次下載 | 免費
- 3DMT0660數字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 5TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 6STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 7TPS92682-Q1幀定義和示例
- 891.71KB | 6次下載 | 免費
- 8HY12P65/HY12P66數字萬用表芯片規格書
- 0.69 MB | 6次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監
工商網監
評論