 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹:
由于 COVID-19,我們將機器人命名為(英雄)的原因。如今,即使設備齊全或有蓋,人們仍冒著生命危險對場所進行消毒。不知何故,他們被病毒感染了,但對我們來說,他們是真正的拯救生命的英雄。所以我們決定不再讓人類參與,而是在現場引入機器人來挽救我們寶貴的生命。所以我們將我們的機器人命名為 UV Hero。
機器人的目的:
該機器人的目的是對辦公室、醫院、廁所、機場等污染區域進行消毒。它可以在沒有任何人參與的情況下使用,還可以對門把手、開關板、椅子、桌子等特定區域進行消毒。
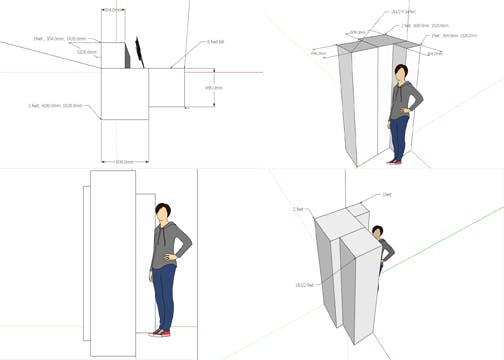
我們將機器人設計為大約一英尺半的區域,因為大多數門和攤位都在兩英尺寬和 6.5 英尺高。
建造:
?
如何構建:
所需工具:
- 鉆孔機
- 扳手
- 螺絲刀
- 膠槍
- 鋁點焊機
- 拼圖
- 卷尺
- 橡膠粘合劑
- 環氧樹脂
所需組件:
購買物料清單中列出的所有產品。
腳步
制作機器人底座
- 根據設計使用曲線鋸切割 5mm 厚的鋁板。
- 使用 tig 或弧焊機焊接所有側面并按照圖表鉆孔。
制作輪子
- 根據圖表切割 5' 4 PVC 管。
- 關閉管子的兩端做輪子并打孔以“連接電機”。
- 將另外兩個輪子連接到軸承上,并將其連接到踏板桿上以自由移動。
- 切割橡膠板并使用橡膠粘合劑將其連接到車輪上。
安裝 UVC t8 燈
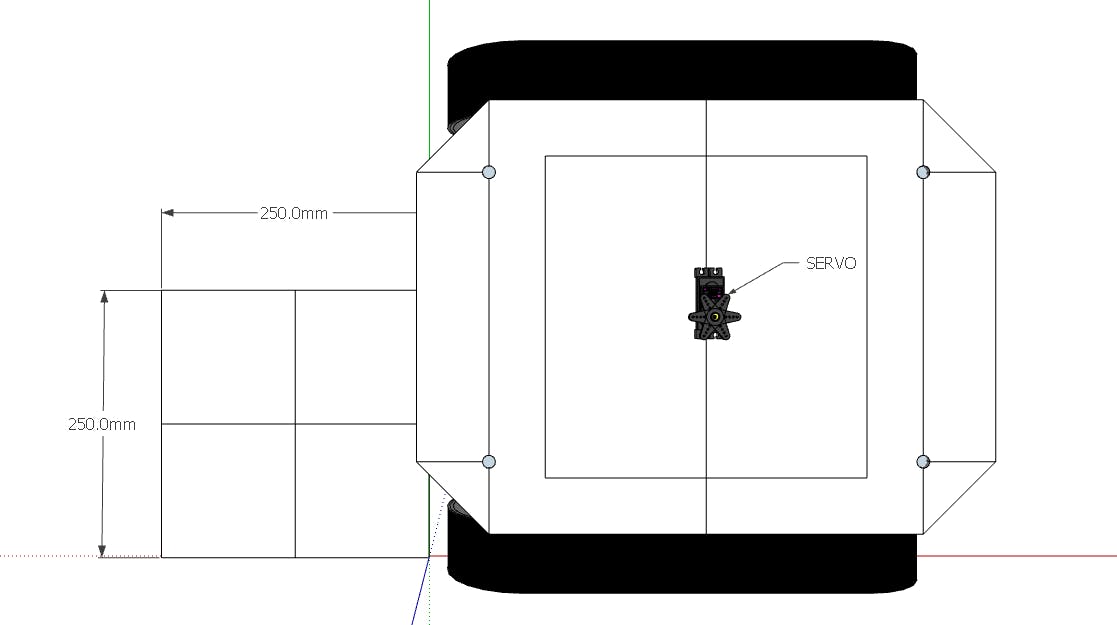
- 將基礎伺服連接到機器人的底座上,切割兩個 255mm 直徑的圓形片和一個 250mm 的圓形片
- 將伺服軸連接到 250mm 件
- 使用塑料外殼制作半英尺墊片并安裝 uvc 管燈。
- 取 5 英尺長的塑料片,剪下 1 英尺寬的塑料片,然后將反光片粘貼在塑料片上。
- 用塑料片做保護蓋,蓋在上面。
制作一個uvc頻閃燈并安裝伺服gymbal
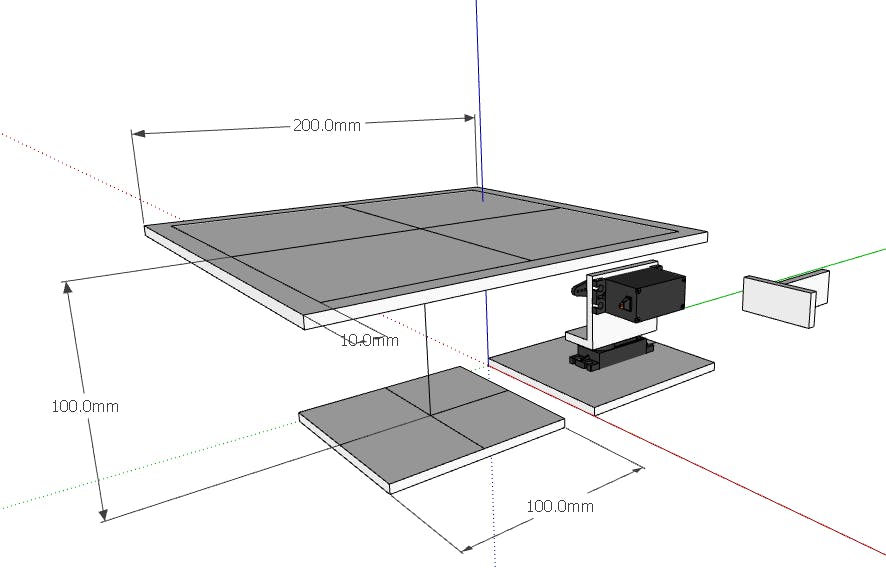
- 為了使一個gymbal在x和y軸上連接兩個伺服器,相應地在構建鋁制外殼的頂部按照圖表進行頻閃燈,并在外殼內粘貼反光片。
- 現在在外殼中間焊接 6 格 uv-c led。
- 并將其與伺服連接。
安裝底座燈
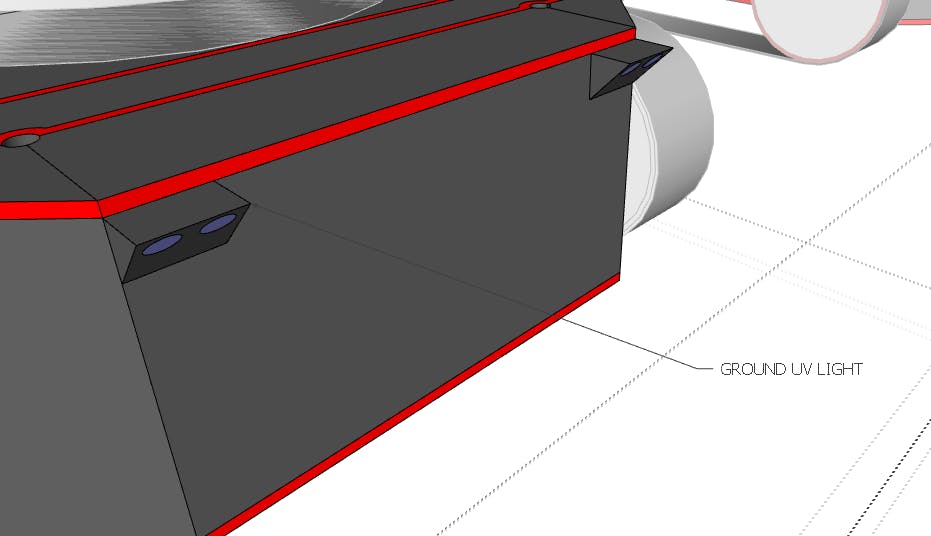
- 最后,以 45 度角安裝 uv-c 基礎燈。
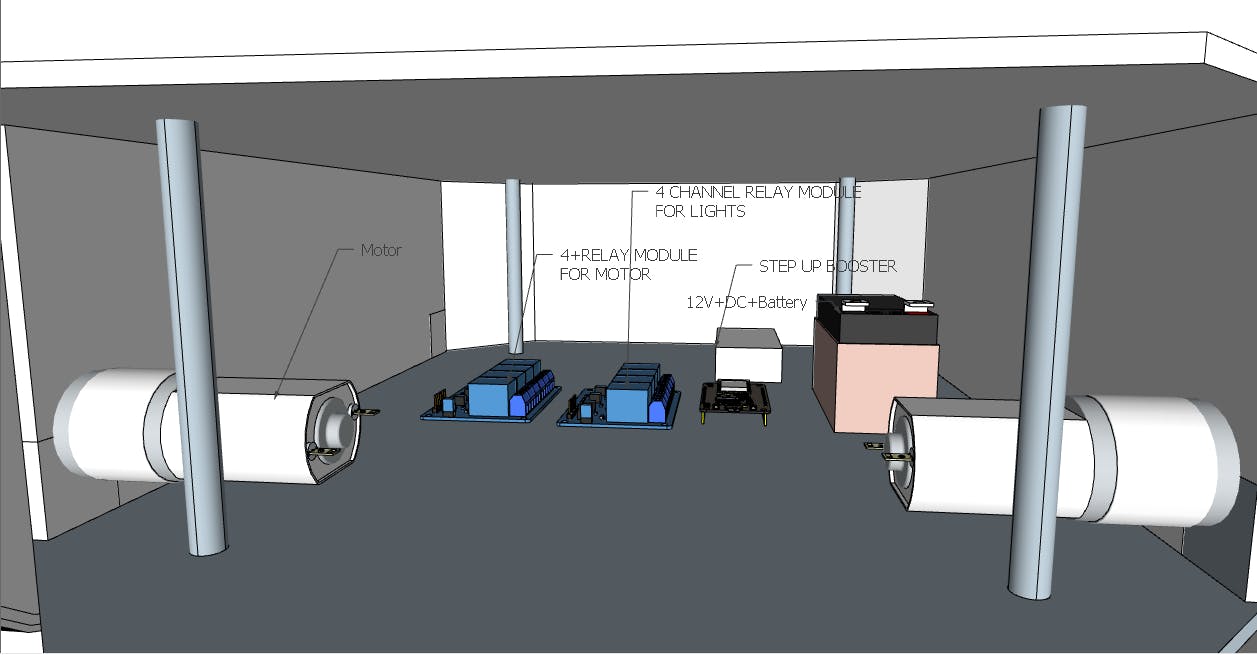
內部零件:
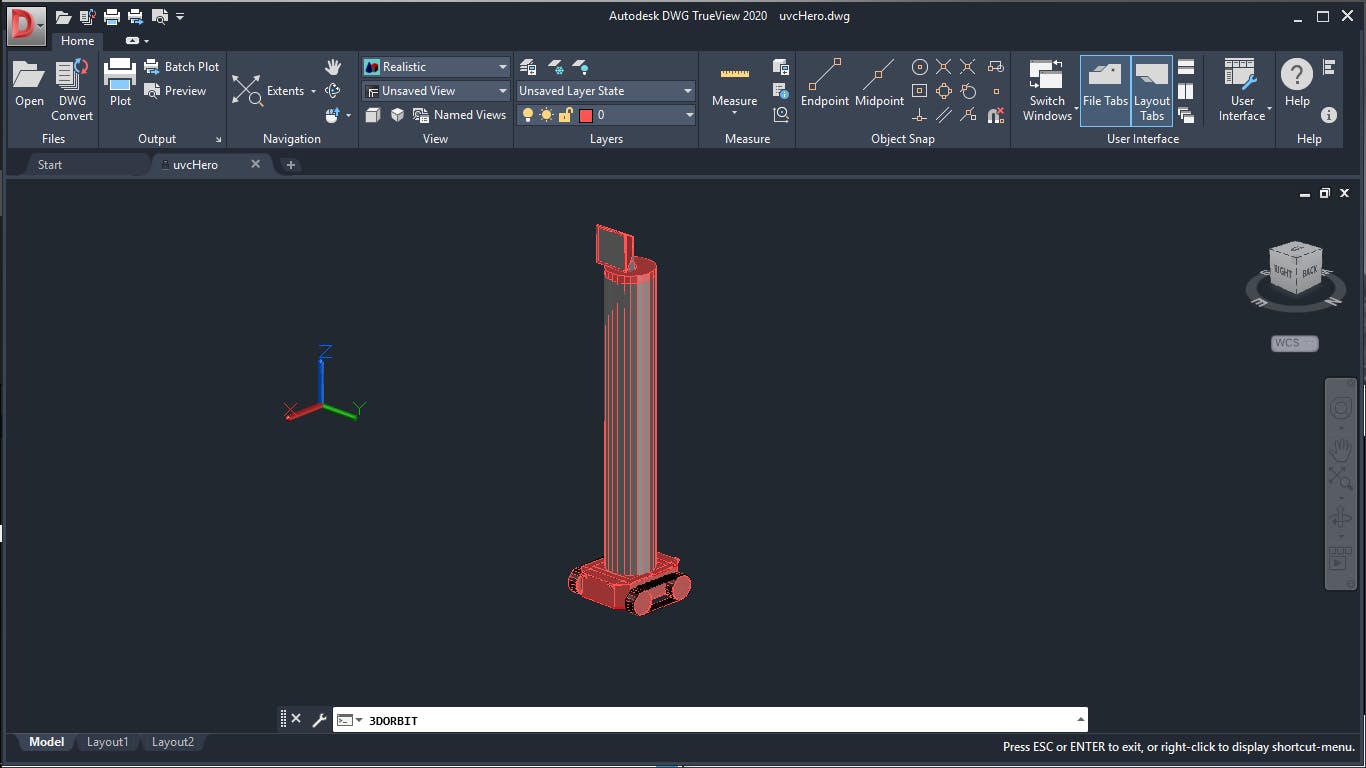
組裝機器人圖像:

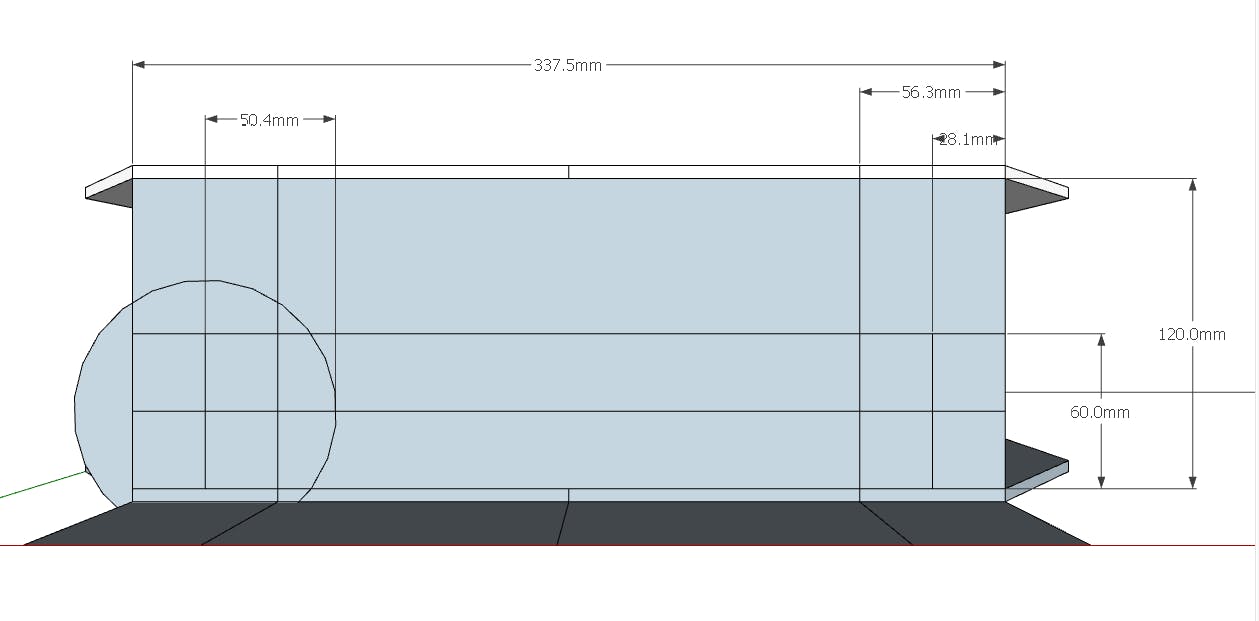
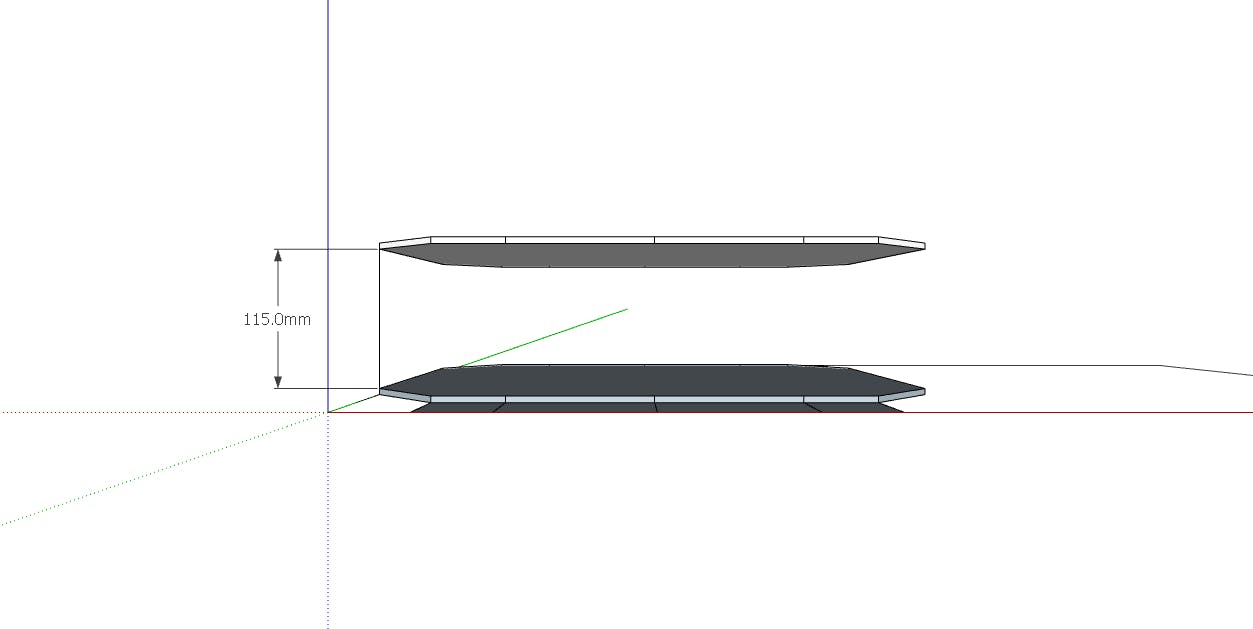
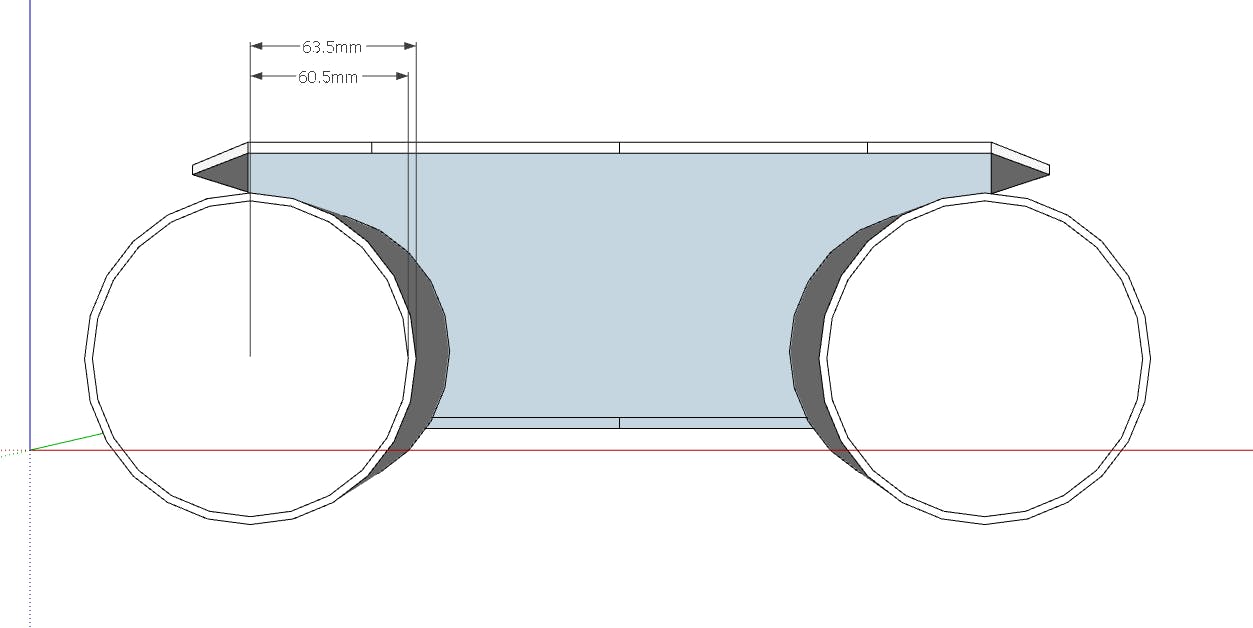
CAD設計:
在 MIT 應用程序發明者中制作應用程序:
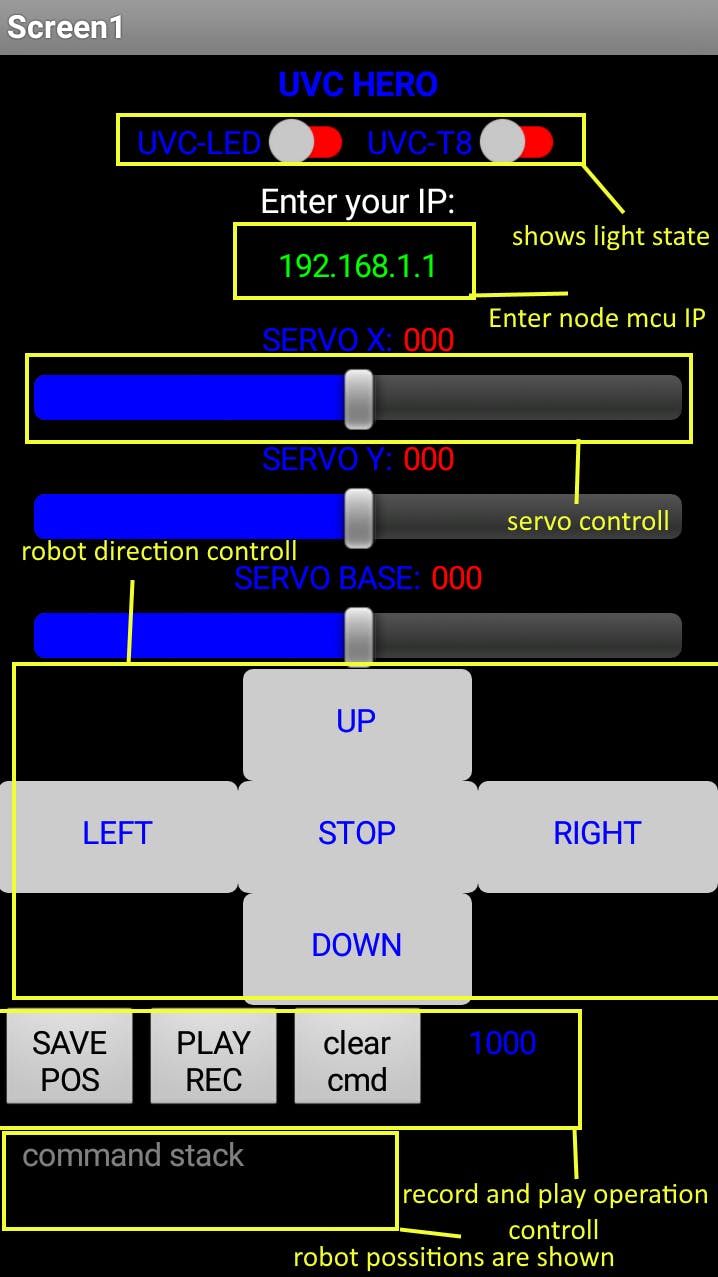
- 這個 android 應用程序用于通過 WIFI 控制機器人。
- 首先我們需要輸入機器人的IP地址,機器人將連接到網絡
- 當我們訪問用戶界面時,命令被發送到節點 mcu Bord,然后機器人將移動。
- 現在在開始控球時移動機器人并開始保存下一次控球
- 記錄房間布局的每一個財產,現在所有財產都保存在一個文本文件中。
- 將機器人移動到起始點并單擊播放按鈕播放記錄的財產
- 完成后,機器人和燈會關閉
- 該應用程序指示安全燈狀態。
電路和連接:
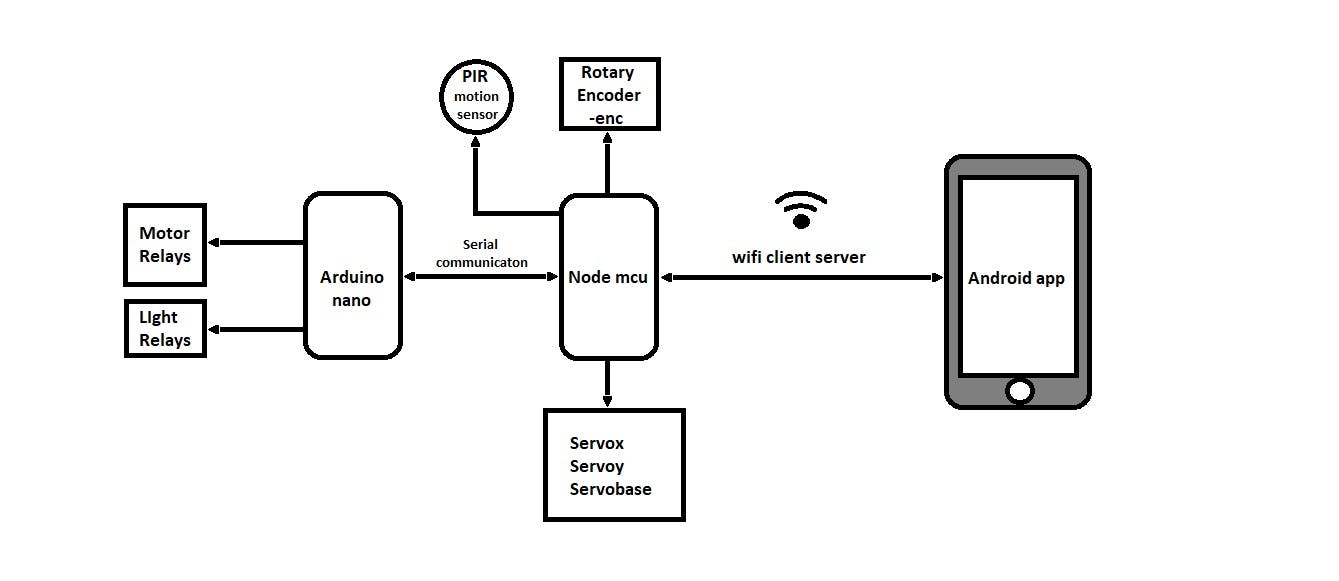
- 借助示意圖連接所有電子設備
解釋 :
我們的動機是在沒有任何人參與的情況下對整個房間進行消毒。所以我們決定打造一款性價比高的遙控機器人,命名為(UV Hero)。該機器人可通過WIFI控制距離收容區約5-6米。它具有對特定區域進行消毒的特殊功能,例如門把手、水龍頭和開關等。通過使用 UV-C LED 頻閃燈,它可以在任何方向聚焦,其他功能是通過可旋轉的 UV-C T8 燈對物體和墻壁進行消毒,然后是用于地板消毒的基礎 UV-C LED。在我們的項目中,機器人可以記錄房間的布局并稍后進行操作。通過使用這種方法,我們可以在需要時對房間進行消毒,這使我們的機器人用戶友好。為安全起見,運動檢測器(PIR 傳感器)安裝在 UV-C T8 燈附近,如果有人靠近機器人,它將關閉。
程序:
打開 Arduino IDE 連接 Arduino nano 板選擇端口并上傳給定的草圖。完成后,連接節點 mcu 并將所需的庫安裝到 IDE,在草圖上輸入您的 SSID 和密碼,然后上傳。一旦它上傳打開串行監視器獲取 IP 地址并在 android 應用程序中輸入它。
保存位置的算法:
當我們按保存時,起始位置將被保存,然后將機器人移動到下一個位置,當我們完成保存位置時按保存,它們將存儲在文本文件中。
當我們按下播放按鈕時,保存的位置被發送到節點 mcu
節點 mcu 讀取該位置并使用上述算法進行處理
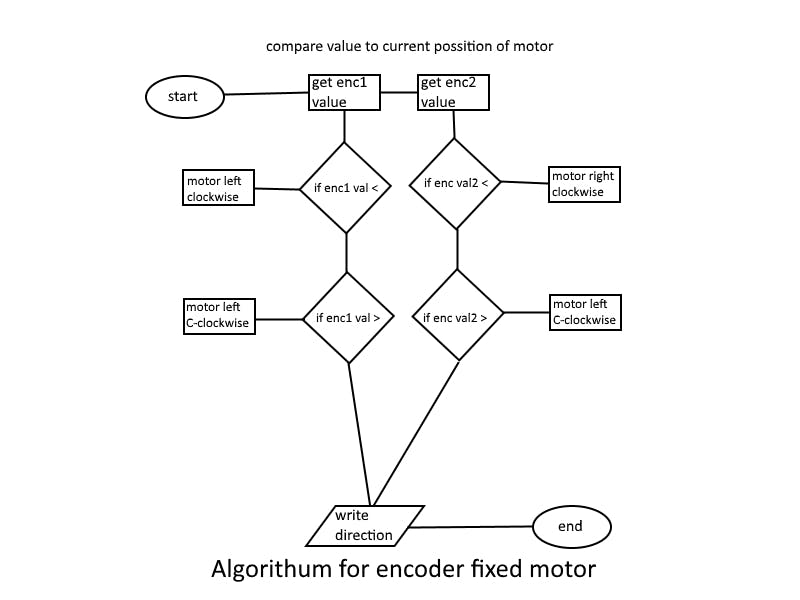
在職的:
一旦節點 mcu 獲得該值,它將與電機的當前位置進行比較并運行電機以達到該值。
同樣的算法用于記錄伺服。
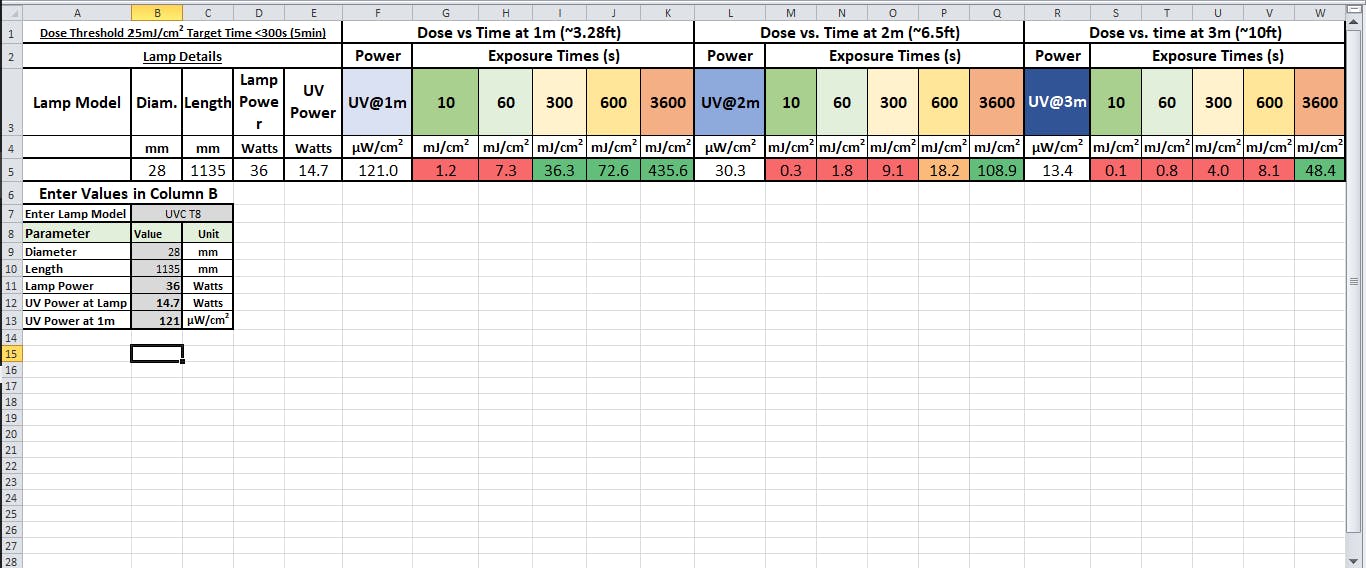
計算 uv-c 殺滅劑量
優點:
- 沒有人類參與該領域。
- 沒有液體消毒劑。
- 便于使用。
- 錄制和播放功能使機器人無憂無慮。
- 可以在任何地方使用。
- 經濟有效的消毒方法。
缺點:
- 機器人只在室內工作。
- 它不是完全自動化的。
- 機動過程中不得發現障礙物。
安全:
- 如果機器人在工作時檢測到任何運動,它將停止。
- uvc 燈泡由外殼固定。
- 該應用程序將指示 uvc 是打開還是關閉。
- YolkaBot機器人開源分享
- 檢測機器人開源分享
- Arduino機器人開源
- 坦克機器人開源分享
- 掃地機器人開源資料 43次下載
- 機器人守衛開源分享
- 伺服機器人開源分享
- 堆肥機器人開源分享
- 機器人開源案例
- 小臂機器人開源分享
- Arduino機器人開源分享
- 助理機器人開源分享
- 機器人開源項目
- 基于DSP和PC的農業機器人控制系統 17次下載
- 開架式通用水下機器人開源搭建手冊.pdf 11次下載
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 843次閱讀
- 鑄造機器人是什么?選擇工業機器人應該考慮的方向 1137次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- 工業機器人技術應用 5176次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3270次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 2使用TL431設計電源
- 0.67 MB | 2次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統
- 0.85 MB | 1次下載 | 1 積分
- 5LabVIEW環形控件
- 0.01 MB | 1次下載 | 1 積分
- 6PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 751單片機核心板原理圖
- 0.12 MB | 1次下載 | 5 積分
- 8BP2879DB支持調光調滅的非隔離低 PF LED 驅動器
- 1.44 MB | 1次下載 | 免費
本月
- 1開關電源設計原理手冊
- 1.83 MB | 54次下載 | 免費
- 2FS5080E 5V升壓充電兩串鋰電池充電管理IC中文手冊
- 8.45 MB | 23次下載 | 免費
- 3DMT0660數字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 12次下載 | 免費
- 5ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 6TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 7STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 8基于MSP430FR6043的超聲波氣體流量計快速入門指南
- 2.26MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監
工商網監
評論