 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
該項(xiàng)目展示了使用超聲波傳感器自動(dòng)喂養(yǎng)寵物的小型演示。如果在指定范圍內(nèi)檢測到物體,則會(huì)發(fā)送信號(hào)以打開網(wǎng)絡(luò)攝像頭。然后進(jìn)行測試,看看是貓還是狗,然后根據(jù)檢測結(jié)果提供貓或狗糧。
這個(gè)項(xiàng)目中使用的東西
1.硬件
WIZNET W5100S EVB微微
超聲波傳感器
跳線
面包板
2.軟件
Arduino集成開發(fā)環(huán)境
PyCharm公司
問題說明:
寵物是人類的好伴侶。它有助于緩解繁忙生活中的緊張情緒,并對搶劫犯起到威懾作用。如今,寵物被視為家庭成員。因此,必須考慮寵物的整體健康,并優(yōu)先考慮均衡飲食。根據(jù)寵物的體型,需要不同數(shù)量的食物和營養(yǎng)素。根據(jù)民意調(diào)查,李寵物的肥胖問題是由寵物主人的繁忙日程造成的。此外,寵物無法獨(dú)立獲得食物,必須依靠寵物主人喂養(yǎng)。因此,自動(dòng)寵物喂食器被設(shè)計(jì)出來,現(xiàn)在正被用來處理喂養(yǎng)寵物的問題。
自動(dòng)寵物喂食器是一種可以編程取代手動(dòng)喂食的產(chǎn)品,并且可以設(shè)置為特定的喂食量和時(shí)間。寵物喂食器的創(chuàng)新用于克服寵物主人對喂養(yǎng)寵物的健忘,并將寵物留在寵物酒店以避免額外的消費(fèi)費(fèi)用。
組成部分:
超聲波傳感器:
超聲波傳感器是一種電子設(shè)備,它使用超聲波來檢測目標(biāo)物品之間的距離,并將反射的聲音轉(zhuǎn)換為電信號(hào)。超聲波比可聽聲波(即人類能聽到的聲音)傳播得更快。發(fā)射器(使用壓電晶體產(chǎn)生聲音)和接收器是超聲波傳感器的兩個(gè)主要部件(在聲音往返于目標(biāo)后會(huì)遇到聲音)。該計(jì)算公式為D=1?2 T x C(其中D為距離,T為時(shí)間,C為聲速~343米/秒)。
步進(jìn)電機(jī):
將整個(gè)旋轉(zhuǎn)分為幾個(gè)相等步驟的無刷直流電動(dòng)機(jī)被稱為步進(jìn)電動(dòng)機(jī)或步進(jìn)電動(dòng)機(jī)。只要電機(jī)在扭矩和速度方面被適當(dāng)?shù)乜s放以用于應(yīng)用,就可以指示電機(jī)的位置在這些步驟中的一個(gè)步驟處移動(dòng)和保持,而無需任何用于反饋的位置傳感器(開環(huán)控制器)。
W5100S EVB Pico:
W5100S EVB Pico是一款微控制器評估板,使用樹莓派RP2040微處理器芯片和W5100S全硬接線TCP/IP控制器芯片。由于W5100S EVB Pico執(zhí)行與Raspberry Pi Pico平臺(tái)相同的功能,并且包括W5100S,因此基本上包含了以太網(wǎng)功能。
ULN2003步進(jìn)電機(jī)驅(qū)動(dòng)器:
電機(jī)由IN1–IN4引腳驅(qū)動(dòng)。將它們連接到微微板
GND代表“公共接地引腳”
電機(jī)連接器電機(jī)插入其中。連接器只有一種方式,因?yàn)樗擎I控的。
MCU Micro USB Breadboard 5V電源模塊:
5V電源模塊5Pin母連接器B型PCB轉(zhuǎn)換器,用于MCU Micro USB Breadboard。這個(gè)轉(zhuǎn)接板非常適合將USB信號(hào)連接到您專門創(chuàng)建的微控制器板上。如果您只需要為面包板、穿孔板或Vero板原型電路提供5V USB電源,這也很有幫助。
引腳:
VCC:5V信號(hào),D+:USB D+電源,D-:USB D-信號(hào),ID:OTG設(shè)備USB標(biāo)識(shí)符信號(hào),電源接地:GND
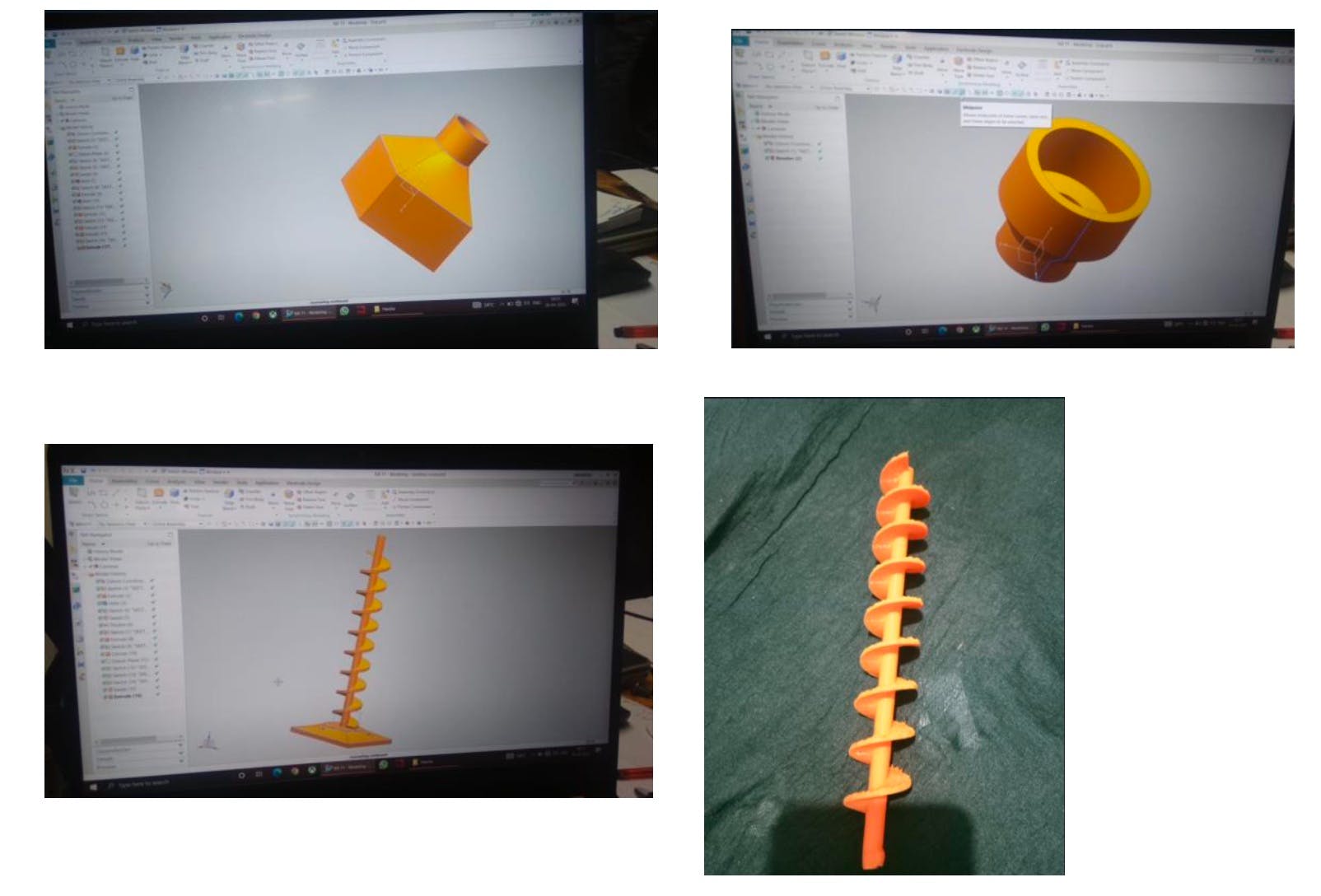
三維模型:
三維模型可用于控制施工中的機(jī)械。這些復(fù)制包括物理環(huán)境的點(diǎn)、線和曲面。它們利用坐標(biāo)信息,顯示水平點(diǎn)和垂直點(diǎn)相對于固定點(diǎn)的位置。這些空間聯(lián)系使您能夠從不同的角度觀察表示。
用于打印阿基米德螺旋的3D打印機(jī)。
阿基米德螺旋:
阿基米德螺旋的螺旋部件可以在里面,但在這個(gè)例子中,它將被放置在空心圓柱體內(nèi)。排放區(qū)在一端,而低洼的食物源在另一端。只要轉(zhuǎn)動(dòng)螺絲就可以移動(dòng)食物。螺桿旋轉(zhuǎn)時(shí),會(huì)舀起少量食物。

說明:
? 步進(jìn)電機(jī)和超聲波傳感器通過其相應(yīng)的VCC和GND引腳連接到VCC和地線,以提供電源(12V)。
? 超聲波傳感器的Trig引腳連接到Wiznet Pico板的GP16。
? Echo引腳連接到Wiznet Pico板的GP17。
? GP2、GP3、GP4、GP5分別連接到一個(gè)步進(jìn)電機(jī)的IN1、IN2、IN3、IN4,并且GP6、GP7、GP8、GP9分別連接到另一個(gè)步步進(jìn)電機(jī)。
? 如果在超聲波傳感器前看到物體,則會(huì)向Pycharm發(fā)送一個(gè)串行寫入,以激活攝像頭來識(shí)別貓或狗。
? 如果網(wǎng)絡(luò)攝像頭檢測到貓或狗,任何一個(gè)步進(jìn)電機(jī)都會(huì)旋轉(zhuǎn)。
代碼說明:
步進(jìn)電機(jī):我們可以用這個(gè)庫操作單極或雙極步進(jìn)電機(jī)。我們將需要一個(gè)步進(jìn)電機(jī)和必要的硬件來控制它來利用它。
引腳1(Vcc):此引腳為傳感器提供+5V電源。
引腳2(觸發(fā)器):此輸入引腳用于發(fā)送超聲波,并通過保持高電平10us來啟動(dòng)測量。連接到GP15
引腳3(回聲):該輸出引腳在預(yù)定的時(shí)間內(nèi)變高,這與波返回傳感器所需的時(shí)間相對應(yīng)。連接到GP14
引腳4(接地):此GND引腳用于連接到系統(tǒng)的GND。
然后根據(jù)等待聲音反射回來所需的時(shí)間來計(jì)算距離。
此公式可用于確定需要從傳感器測量的精確距離:
距離=1/2 T乘以C
(T=時(shí)間,C=聲波速度)
距離=(持續(xù)時(shí)間/2)/29.1
如果距離小于10厘米,則會(huì)對PyCharm“檢測到”進(jìn)行串行寫入,從而激活網(wǎng)絡(luò)攝像頭進(jìn)行額外檢測。
任一步進(jìn)電機(jī)將根據(jù)通過攝像頭檢測獲得的輸入數(shù)據(jù)(Cat或Dog)旋轉(zhuǎn)。
在這里,只有少量的食物需要流動(dòng),因此我使用了一個(gè)for loop,如果條件為假,步進(jìn)電機(jī)的旋轉(zhuǎn)將立即停止。
將物聯(lián)網(wǎng)與人工智能相結(jié)合:
人工智能驅(qū)動(dòng)的物聯(lián)網(wǎng)產(chǎn)生了模擬智能行為和支持決策的智能技術(shù),幾乎沒有人參與。
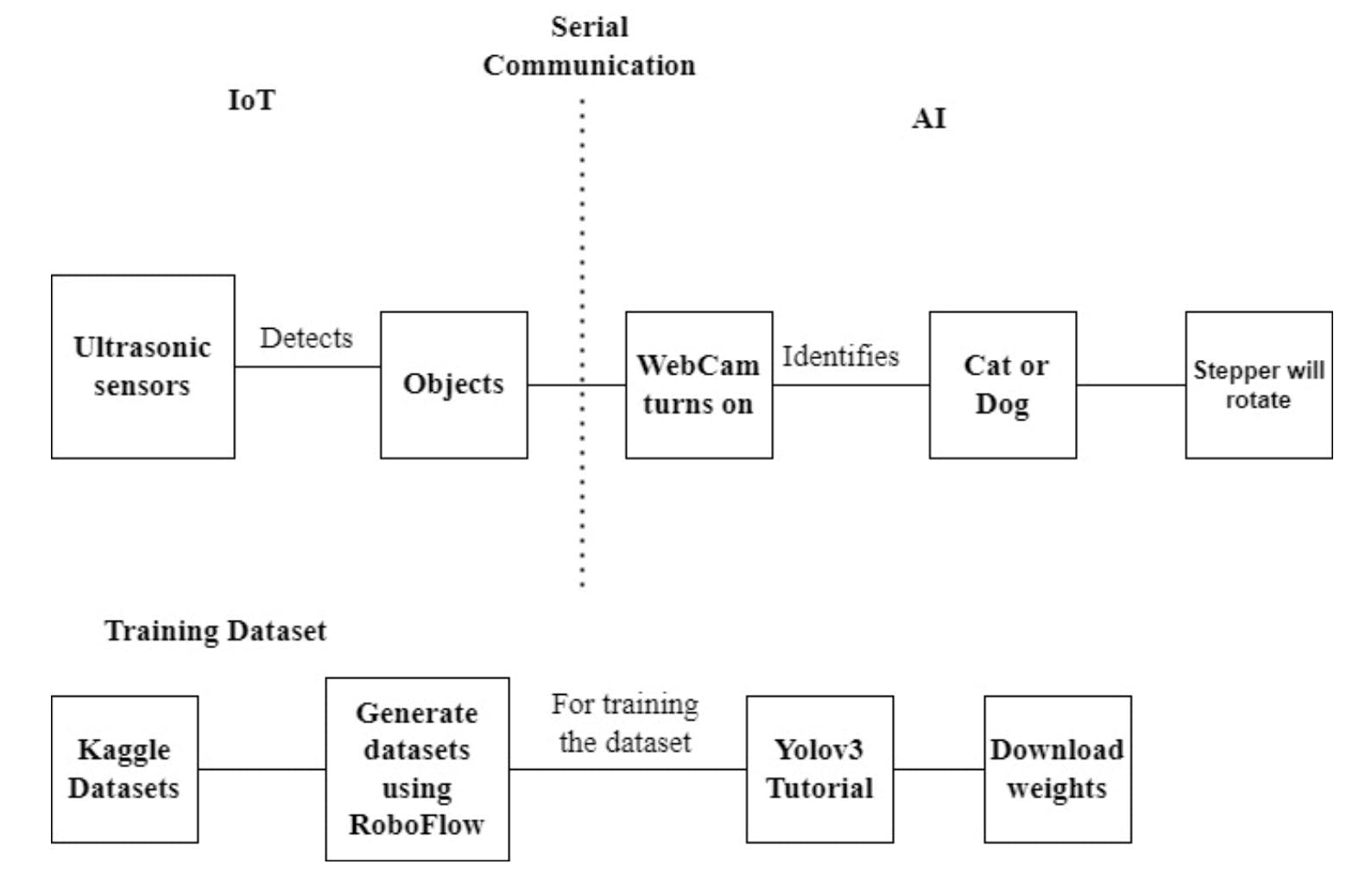
在這里,首先使用超聲波傳感器定位物體,然后,攝像機(jī)轉(zhuǎn)向以確定物體是貓還是狗,根據(jù)確定結(jié)果,喂食貓糧或狗糧。
代碼說明:
PySerial使用多種不同的設(shè)備,是一個(gè)支持串行連接(RS-232)的庫。
首先檢查在該范圍內(nèi)檢測到的任何對象。如果是,它將讀取輸入,將其存儲(chǔ)在一行中,解碼,然后將其與“檢測到”的響應(yīng)進(jìn)行比較。如果結(jié)果相同,它將調(diào)用函數(shù)start1(),其中包括啟動(dòng)網(wǎng)絡(luò)攝像頭來尋找貓或狗。
由于我們的主要目標(biāo)是檢測貓和狗,類由一組id組成。
我給了貓或狗一個(gè)條件,如果觀察到其他任何東西,它不會(huì)顯示標(biāo)簽,或者什么都不會(huì)被識(shí)別。
二進(jìn)制數(shù)據(jù)被寫入串行端口,str用于將字符串作為一系列字節(jié)進(jìn)行傳輸。
這里,它涵蓋了置信水平大于8的準(zhǔn)確性。
如果找不到任何東西,相機(jī)將關(guān)閉,并重復(fù)相同的程序。
?
- 寵物喂食器開源硬件
- 自動(dòng)寵物喂食器開源硬件
- 基于Particle Argon的自動(dòng)寵物喂食器 0次下載
- Arduino遙控寵物喂食器
- 智能自動(dòng)魚/寵物喂食器開源分享
- 基于51單片機(jī)的智能寵物喂食器Proteus仿真 87次下載
- 基于涂鴉智能的寵物喂食器
- 如何使用單片機(jī)進(jìn)行寵物喂食器的電路設(shè)計(jì) 17次下載
- 【超聲波傳感器】超聲波傳感器使用問題詳解! 23次下載
- 應(yīng)用超聲波傳感器設(shè)計(jì)水位自動(dòng)控制系統(tǒng)研究 19次下載
- 寵物定時(shí)喂食器設(shè)計(jì)資料 0次下載
- 自動(dòng)喂食器的設(shè)計(jì)原理圖 35次下載
- 超聲波傳感器概述 128次下載
- 在線測量酵母濃度的超聲波傳感器
- 在線測量酵母濃度的超聲波傳感器
- 求一種基于WTR096-28SS芯片方案的寵物喂食器設(shè)計(jì)方案 372次閱讀
- 制作一個(gè)易于使用的自動(dòng)寵物喂食器 5116次閱讀
- 超聲波傳感器如何接線_超聲波傳感器測距 1.6w次閱讀
- 超聲波傳感器構(gòu)成的超聲波加濕器電路 7637次閱讀
- 超聲波傳感器的優(yōu)勢有哪些 4176次閱讀
- 超聲波傳感器的應(yīng)用 1673次閱讀
- hc-sr04超聲波傳感器的原理和應(yīng)用 3.1w次閱讀
- 超聲波傳感器的使用注意事項(xiàng)說明 2905次閱讀
- dfrobotSRF02超聲波傳感器介紹 1593次閱讀
- 超聲波傳感器的優(yōu)勢特點(diǎn)及應(yīng)用介紹 3728次閱讀
- 超聲波傳感器與紅外線傳感器對比誰更好 1.1w次閱讀
- 超聲波傳感器內(nèi)部結(jié)構(gòu)及特點(diǎn) 1.7w次閱讀
- 超聲波傳感器及工作原理解析 9648次閱讀
- 超聲波傳感器有哪些用途_可以應(yīng)用到什么地方 3.6w次閱讀
- 超聲波傳感器的原理及應(yīng)用 1.1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論