 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹
我的第一個機械臂是Arduino TinkerKit Braccio 。隨著我對機器人手臂的了解更多,我產生了使用反向運動學庫并連接到機器人操作系統 (ROS) 等方面的愿望。在具有更大處理器和更多內存的微控制器上,這些目標變得比 Braccio 設計的屏蔽所提供的 Uno 更容易。我選擇了 Arduino Due 作為微控制器的下一個迭代。
現在我必須想辦法制作一個向后兼容的替代 Braccio 盾牌,以適用于 Arduino Due。
設計
對于電子產品來說仍然相對較新,我更喜歡使用現成的模塊為伺服系統提供次級更高電流的電源。我知道我必須小心保護 3.3V Arduino Due 免受 Braccio 伺服器的更高電壓和電流(5V 4A)的影響,我有點擔心自己設計它。
我選擇了一個基于 I2C 的Adafruit 模塊。我通過研究和測試發現,該模塊在邏輯端兼容 3.3V,同時在伺服端仍然能夠提供 Braccio 標準的 5V 4A 電源。這種方法的一個有趣的副作用是輸出到每個伺服系統的 PWM 信號具有 3.5V 的 Vpp(電壓峰峰值),伺服系統仍將其識別為高 TTL 邏輯電平。
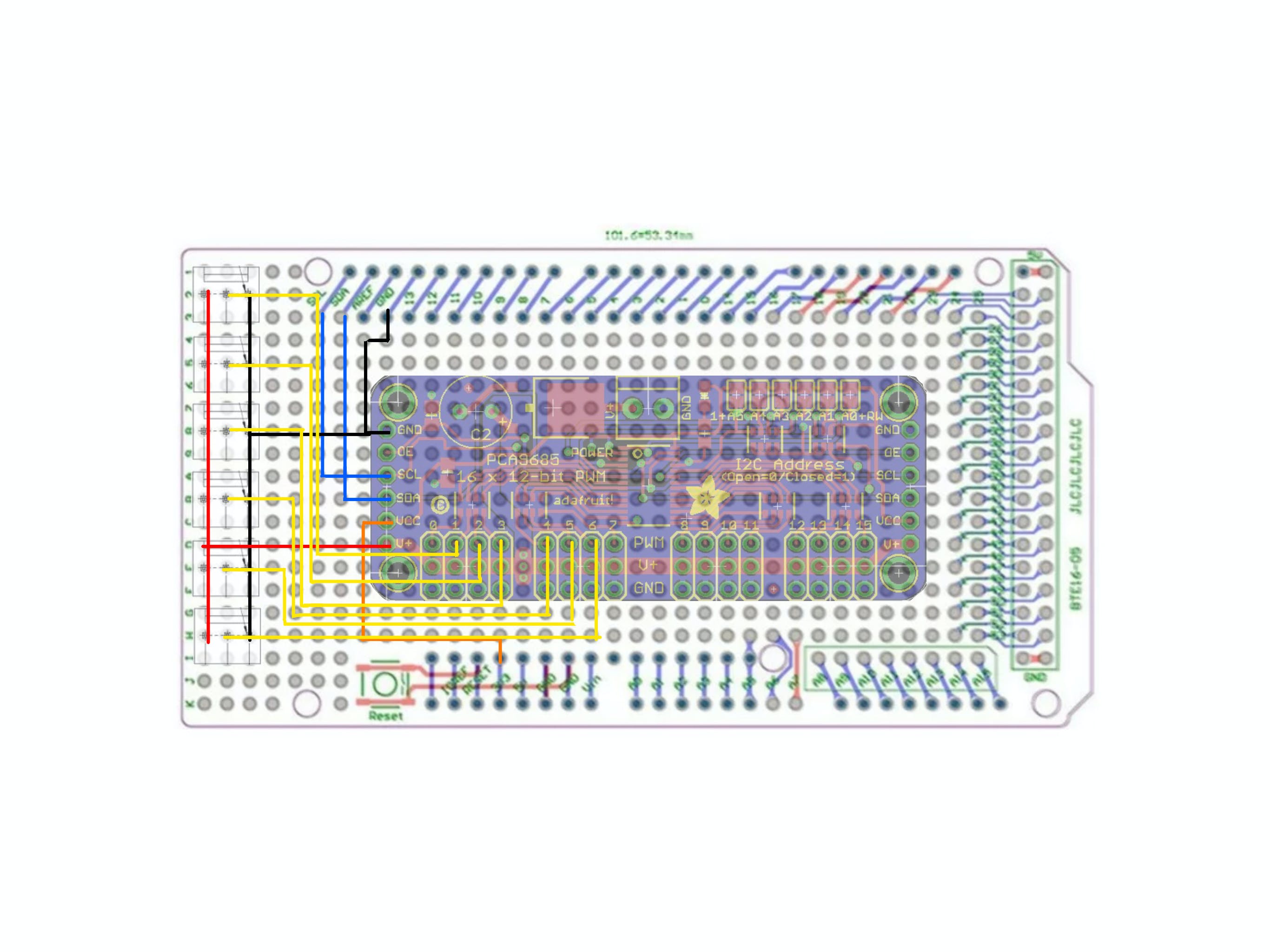
Arduino Due 尺寸的原型設計護罩旨在作為 Adafruit 模塊和伺服引線連接器的簡單安裝機制。唯一需要的 Arduino Due 引腳是 I2C 線接口和邏輯電路的電源。選擇Wire1只是為了保持連接整潔和最小化(Arduino Due 有兩個 I2C/wire 接口)。
- D71 (SCL1) 連接到 PCA9685 SCL
- D70 (SDA1) 轉 SDA
- 3V3 轉 Vcc
- 地到地
找到原始 Arduino Uno Braccio 屏蔽上使用的特定三線連接器是保持物理兼容性的關鍵。這些被確定為 Molex KK-254(也稱為 KF2510)連接器。重要的是要注意,與大多數其他愛好者伺服器相比,Braccio 連接的接線是非常規的。您不能只修改 Braccio 伺服連接器并將它們直接插入 PCA9685 模塊,因為引腳的排列方式不同。
建造
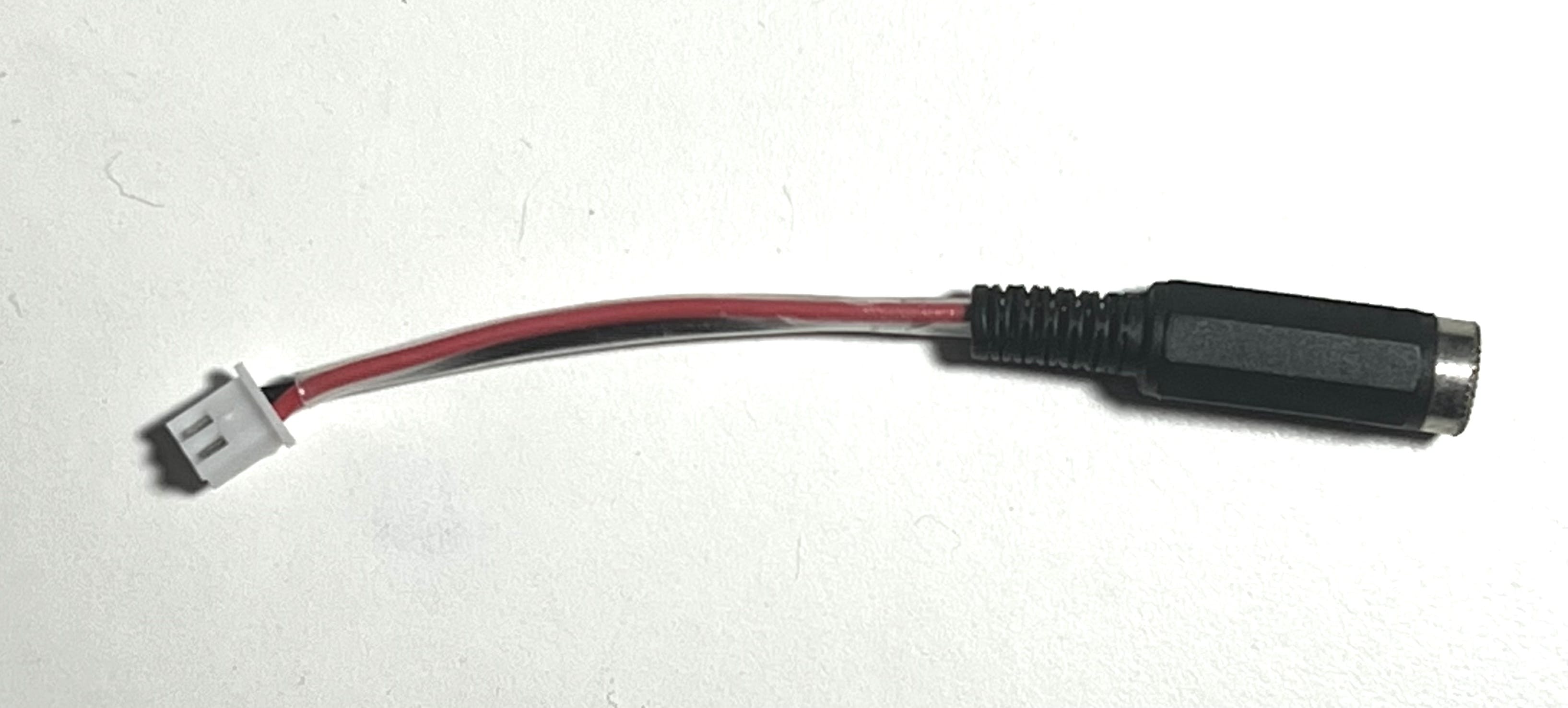
PCA9685 通常配有螺絲門電源端子,用于連接外部電源。我選擇將其換成直角安裝 JST XH 連接器。我承認這有點混亂,因為引腳對齊不完全匹配,JST 連接器上的腿必須張開一點。如果連接器不是直角類型,那么這種不當處理會使引腳錯位。然后我手工制作了一個短電源適配器引線(見照片),以使原來的 Braccio 壁式插頭電源仍可用于為伺服系統供電。
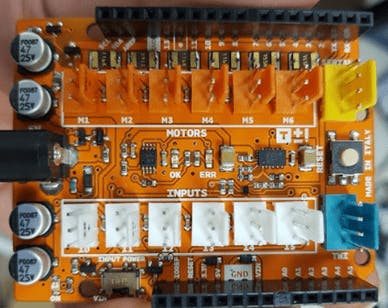
信號連接焊接到 PCA9685 上的引腳 1 到 6,以將引腳編號與 Braccio 伺服編號方案對齊。
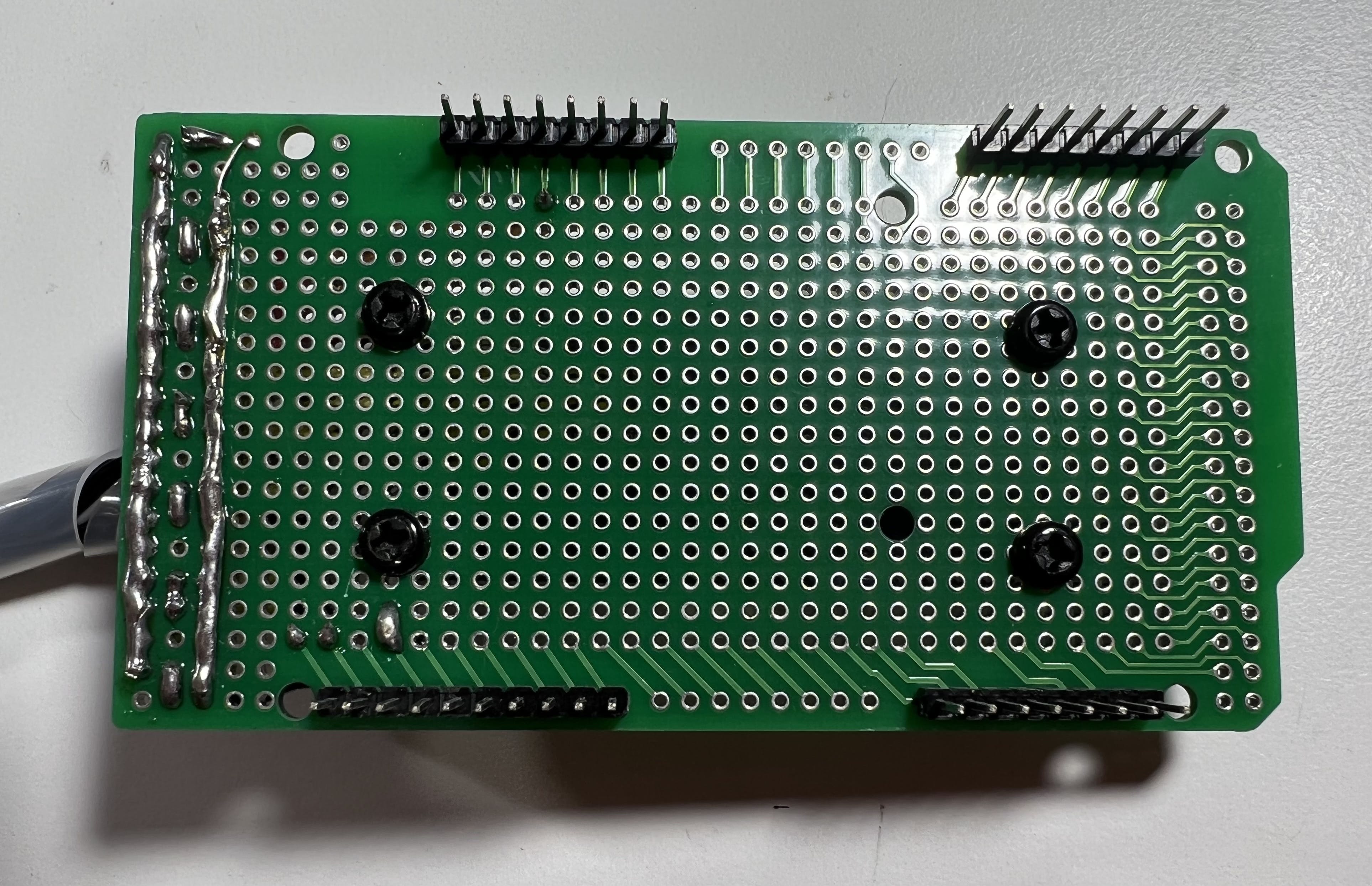
您可能會在下面的照片中注意到,僅連接了相對較少的插頭引腳,以使屏蔽罩易于安裝和拆卸。由于屏蔽層的高度,我沒有使用可堆疊的接頭,但事后看來,這對于以后訪問其他 arduino 引腳很有用(例如,如果您要添加其他傳感器)。
Molex KK 連接器的 V+ 和 GND 連接被焊接為軌道。每個 PWM 信號焊接到每個連接器的中間引腳。
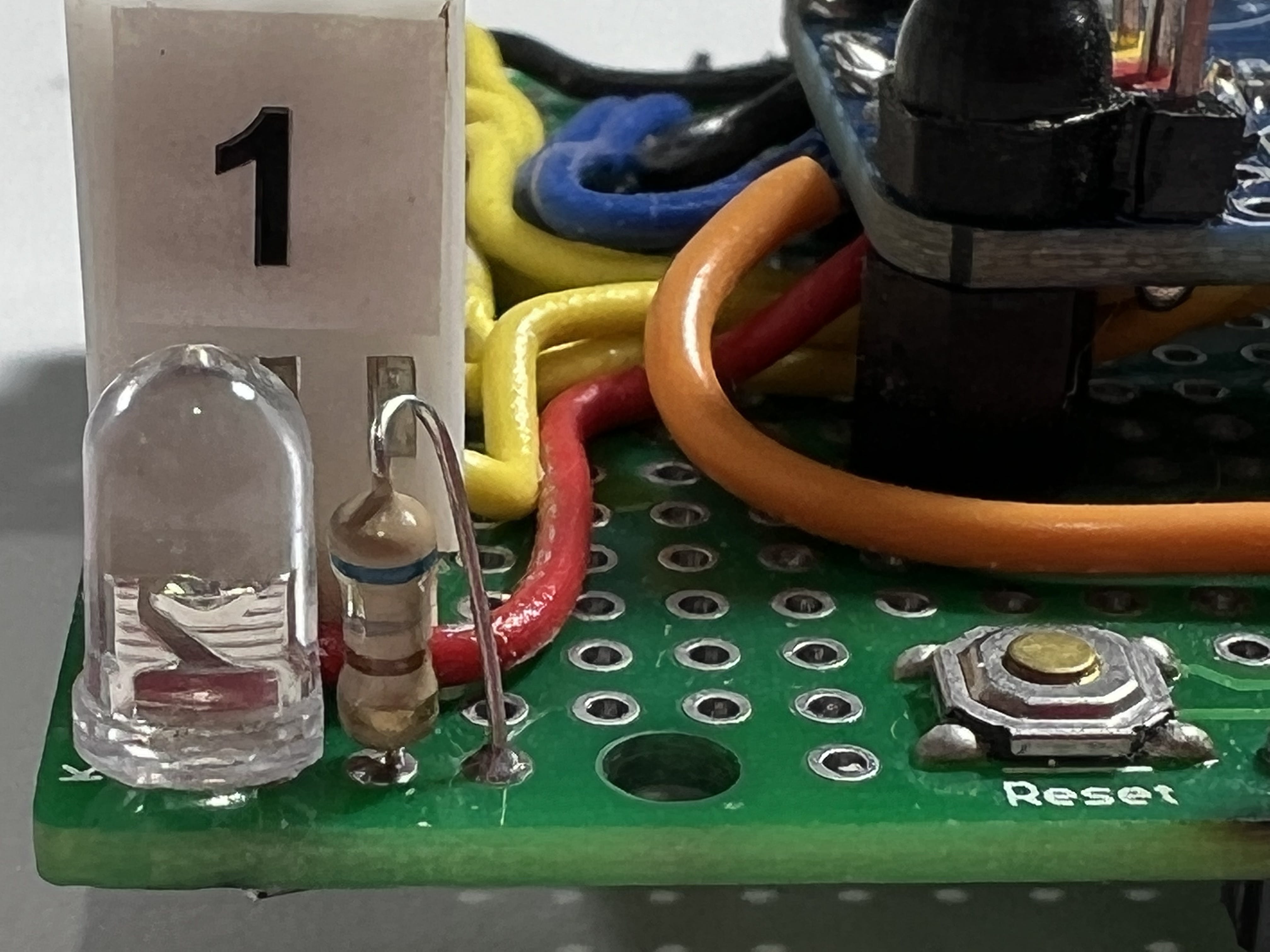
在下面的照片中,您可能會注意到圖片左上角有一些無法解釋的額外焊接連接。這是我稍后添加的 LED 電機電源指示燈和隨附的電阻器。見下面的特寫。
反射
當我將接線直接焊接到 PCA9685 上的引腳 1 到 6 時,我沒有焊接這些端口上的引腳接頭。事后看來,排針對于連接測試設備(例如,萬用表和示波器)很有用。
當我開始構建另一個機械臂時,我重用了這種設計方法。新臂使用傳統的愛好者伺服連接,可以直接連接到 PCA9685 排針,無需 Molex-KK 連接器。原型屏蔽上提供的額外空間對于斷開傳感器連接器和其他東西很有用。
- Scorbot ER-V+自由度機器人手臂控制器和模擬器設計
- DIY Arduino藍牙控制機器人
- 用于Arduino Due的簡單DIY雙端口I2C電平轉換屏蔽
- Arduino機器人手臂 3次下載
- 構建可幫助人們做早餐的桌面智能機器人手臂
- 基于Arduino的DIY避邊機器人 0次下載
- DIY arduino UNO防護罩
- 機器人手臂運動學和動力學研究綜述 5次下載
- 微型電機在機器人手指關節的應用及分類 1次下載
- MH6S工業機器人手冊 10次下載
- Arduino與樹莓派打造Chatbot語音控制機器人手臂 30次下載
- 機器人學之機器人手臂的機械結構和機電設置詳解 22次下載
- 工業機器人手臂快速碰撞檢測算法 23次下載
- arduino_Due_Reference_design 46次下載
- 高級機器人手冊 28次下載
- 如何創建FPGA控制的機器人手臂 1152次閱讀
- DIY一個簡單的Arduino板子 5703次閱讀
- 基于Arduino的DIY梭芯繞線機器的制造過程 5701次閱讀
- 基于LPC2138微處理器實現機器人手臂控制器的應用方案 3090次閱讀
- dfrobotArduino DUE控制板 介紹 3569次閱讀
- 點焊機器人工作原理_點焊機器人的應用 1w次閱讀
- ABB工業機器人手冊使用方法 8923次閱讀
- 詳解工業機器人的結構驅動及控制系統 7534次閱讀
- 四軸機器人和六軸機器人有什么區別? 2.9w次閱讀
- 一種極其簡單、但功能驚人的機器人手名為SoftHand 2 5407次閱讀
- 甲殼蟲機器人diy制作詳解 3920次閱讀
- 解讀工業機器人結構、驅動及技術指標 3232次閱讀
- 史陶比爾公司推出適用于汽車行業的激光切割機器人 5171次閱讀
- 關于機器人專用術語詳解 9904次閱讀
- DIY一款基于arduino的自動澆花系統 7.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論