 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
*免責聲明*
我不是卡爾曼濾波器專家。只是分享我的故事。也許它對某人有幫助。如果您有任何建議或想法,請隨時在評論中留下它們。
使用卡爾曼濾波器進行定位?
我做了一個在戶外導航的機器人。它使用航路點進行導航。為此,它需要知道它在哪里。這就是大問題開始的地方。知道某事是,并不容易。GPS 看起來很明顯,但并不精確。這是因為您需要移動才能獲得不錯的定位。當附近有樹木和房屋等大物體時,您會得到一種稱為“多路徑”的東西。
使用 IMU?大多數(shù)小型 IMU 不是很一致。您并不總是獲得相同的速度讀數(shù)。在毛茸茸的地形(草)上,情況更糟。
卡爾曼濾波器?卡爾曼濾波器可以做一些叫做“傳感器融合”的事情。它將多個傳感器的輸出組合成一個一致的輸出。
卡爾曼濾波器
卡爾曼濾波器可用作濾波器/平滑器或傳感器融合算法。
卡爾曼濾波器似乎在互聯(lián)網上有很好的記錄。但他們不是。
問題是; 大多數(shù)好的解釋都停留在理論上。他們無法解釋某件事在實踐中的含義。
卡爾曼濾波器的基礎知識
卡爾曼濾波器適用于概率。“系統(tǒng)”/機器人的當前“狀態(tài)”/位置可能位于何處。
機器人當前位置的可能位置。
系統(tǒng)當前狀態(tài)的可能情況。
可能的引擎蓋由“正態(tài)分布”表示。
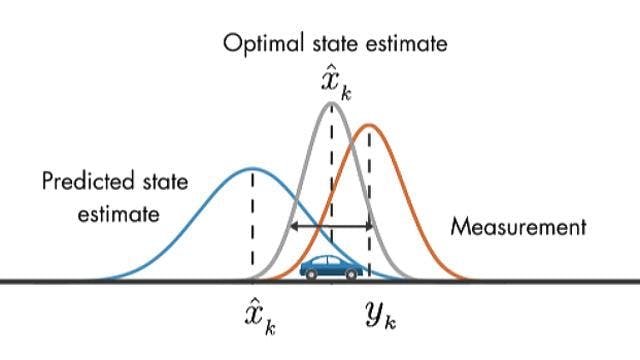
這個可能的引擎蓋可以與谷歌地圖的位置圈進行比較。“你很可能在這個藍色圓圈內。”

網上有一些很好的解釋。這一個說明了這一點。https://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/
讓我們變得實用
在編程(Python)中是定義在矩陣中的卡爾曼濾波器。這些矩陣包含卡爾曼濾波器的配置。
有以下矩陣:
- X:狀態(tài)(輸出)
- P:狀態(tài)噪聲
- F:狀態(tài)轉換模型
- U:預測輸入
- B:輸入模型
- Q:過程噪音
- Z:更新測量值(輸入)
- H:觀察模型
- R:觀察噪聲
我使用這個 Python 類進行計算。(作為 np導入的 Numpy )
import numpy as np
class KalmanFilter(object):
def __init__(self, F = None, B = None, H = None, Q = None
, R = None, P = None, x0 = None):
if(F is None or H is None):
raise ValueError("Set proper system dynamics.")
self.n = F.shape[1]
self.m = H.shape[1]
self.F = F
self.H = H
self.B = 0 if B is None else B
self.Q = np.eye(self.n) if Q is None else Q
self.R = np.eye(self.n) if R is None else R
self.P = np.eye(self.n) if P is None else P
self.x = np.zeros((self.n, 1)) if x0 is None else x0
def predict(self, u=0):
self.x = np.dot(self.F, self.x) + np.dot(self.B, u)
self.P = np.dot(np.dot(self.F, self.P), self.F.T) + self.Q
return self.x
def update(self, z):
y = z - np.dot(self.H, self.x)
S = self.R + np.dot(self.H, np.dot(self.P, self.H.T))
K = np.dot(np.dot(self.P, self.H.T), np.linalg.inv(S))
self.x = self.x + np.dot(K, y)
I = np.eye(self.n)
self.P = np.dot(np.dot(I - np.dot(K, self.H), self.P)
, (I - np.dot(K, self.H)).T) + np.dot(np.dot(K, self.R)
, K.T)
你想要什么&你有什么?
要開始配置矩陣,您需要問自己兩個問題。
- 你想要什么?卡爾曼濾波器必須給出什么輸出?就我而言,我需要知道機器人的位置。
- 你有什么?卡爾曼濾波器有哪些輸入數(shù)據(jù)?這可以是 GPS 位置、IMU 加速度……您的輸入數(shù)據(jù)比您想象的要多!大多數(shù) GPS 模塊提供方位和速度。嘗試從傳感器中獲取所有數(shù)據(jù)。
X 矩陣
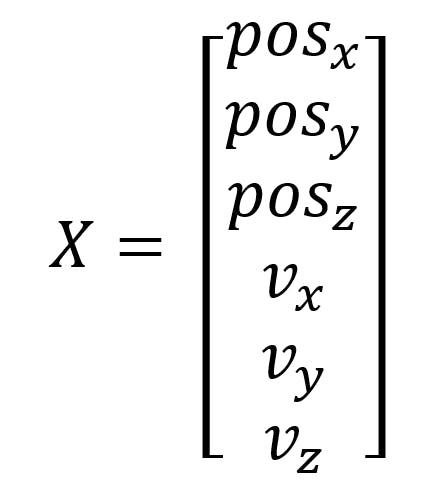
x 矩陣是卡爾曼濾波器的輸出。如果要預測位置,則填寫 XYZ 位置。
Xpos
Ypos
零點
知道速度對于計算位置很方便。所以我填寫了XYZ速度。
速度
速度
速度
X矩陣的最終結果是:
輸入:U 矩陣和 Z 矩陣
有 2 個輸入。狀態(tài)預測的 U 矩陣。狀態(tài)更新的 Z 矩陣。
當您運行卡爾曼濾波器時,您首先要進行預測。做出預測后,您可以做 2 件事:進行另一個預測或更新模型。
- IMU 的讀取頻率為 100Hz。
- GPS 的讀取頻率為 20Hz。
我使用 IMU 作為狀態(tài)預測(U 矩陣)的輸入。用于狀態(tài)更新的較低頻率 GPS。您的卡爾曼濾波器可以做出比更新更多的預測。這就是為什么您將高讀取頻率輸入作為狀態(tài)預測輸入。
框架
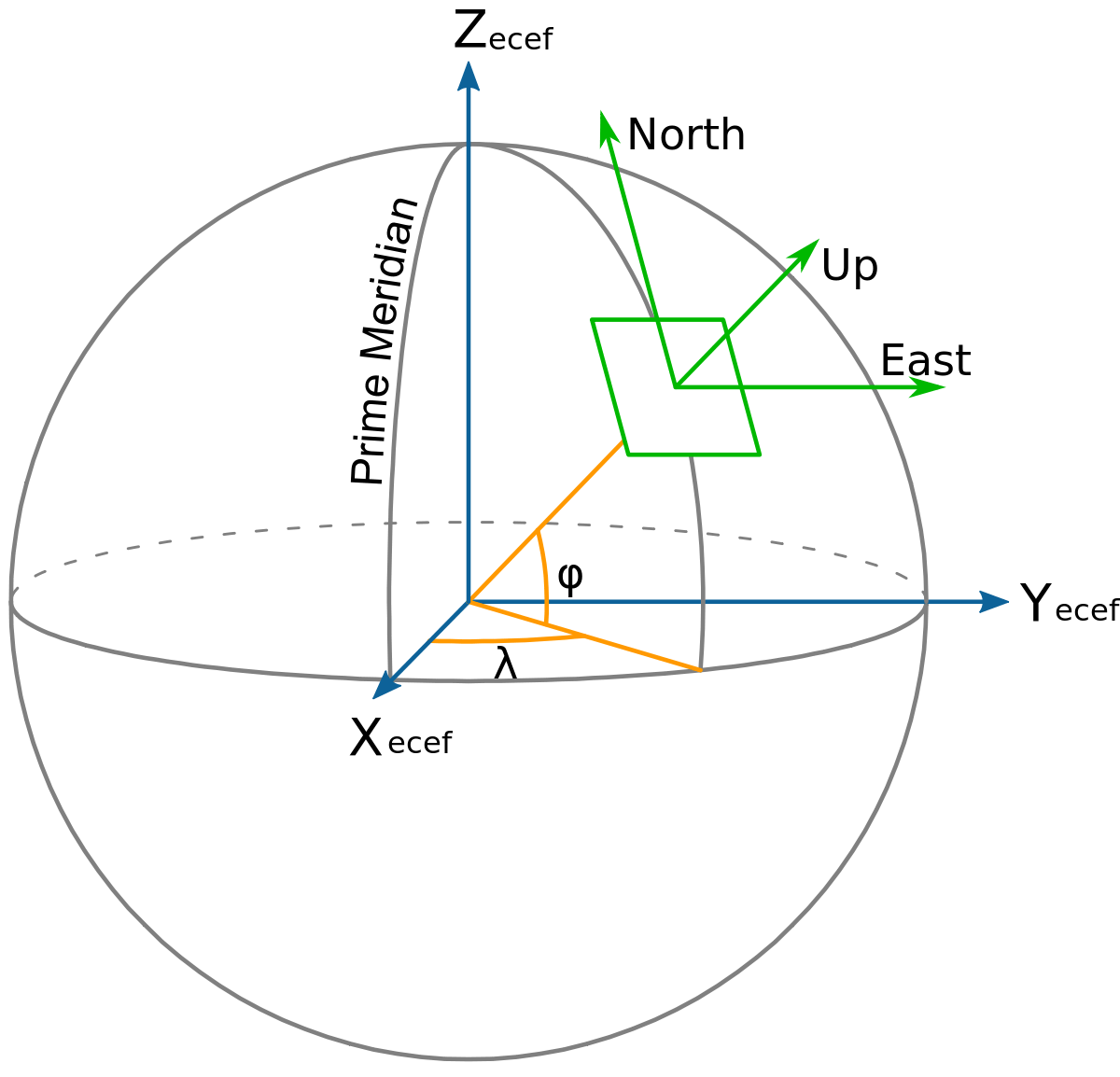
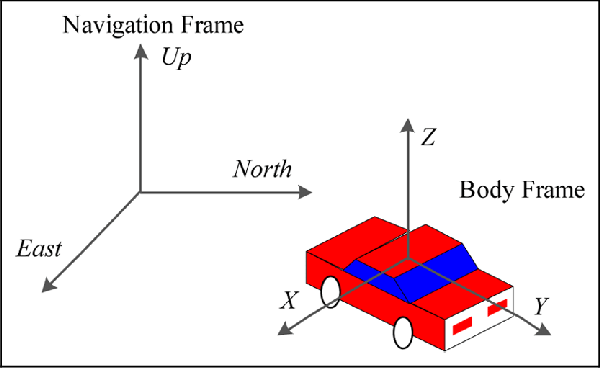
在我們開始向卡爾曼濾波器提供數(shù)據(jù)之前。我們必須首先正確格式化數(shù)據(jù)。加速度必須轉換為正確的框架和正確的比例。有 3 幀。
- GPS全球框架;經度和緯度
- 局部定位框架;卡爾曼濾波器工作的局部坐標系。它有一個參考點(基站)和一個方向(北)。
- 車身框架;IMU 工作所在的框架。它是機器人相對于本地框架的方向。
import math
def GPS_velocity_to_local(gpsVel, angle):
vel = gpsVel
Vx = math.cos(angle) * vel / 3.6 # 3.6 for km/h to m/s
Vy = math.sin(angle) * vel / 3.6 # 3.6 for km/h to m/s
v = [Vx, Vy, 0]
return v
def GPS_position_to_local(gpsRefPosition, gpsCurrentPosition):
lon1 = gpsRefPosition[0]
lat1 = gpsRefPosition[1]
lon2 = gpsCurrentPosition[0]
lat2 = gpsCurrentPosition[1]
dx = (lon1 - lon2) * 40000 * math.cos((lat1 + lat2) * math.pi / 360) / 360 * 1000
dy = (lat1 - lat2) * 40000 / 360 * 1000
return [dx, dy]
import numpy as np
import math
def IMU_acceleration_to_local(bodyRotation, acceleration):
eulXYZ = bodyRotation
y = eulXYZ[0] #yaw
p = eulXYZ[1] #pitch
r = eulXYZ[2] #roll
mes = np.array([
[acceleration[0]],
[acceleration[1]],
[acceleration[2]]
])
c = math.cos
s = math.sin
# Direction cosine matrix
trans = np.array([
[
[c(y)*c(p), c(p) * s(y), -s(p)],
[c(y)*s(p)*s(r)-c(r)*s(y), c(y)*c(r)+s(y)*s(r), c(p)*s(r)],
[c(y)*c(r)*s(p)+s(y)*s(r), c(r)*s(y)*s(p)-c(y)*s(r), c(p)*c(r)]
]
])
out = np.dot(trans, mes).tolist()[0]
out = [out[0][0]*-1, out[1][0]*-1, out[2][0]]
return out
U 矩陣
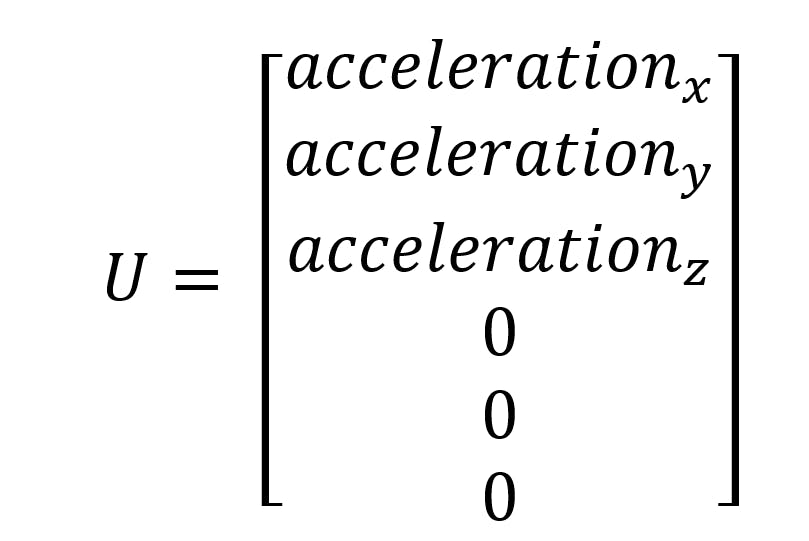
U 矩陣是卡爾曼濾波器的主要輸入矩陣。它用于狀態(tài)預測。在 U 矩陣中,最好使用您的高讀取頻率輸入數(shù)據(jù)。就我而言:IMU 數(shù)據(jù)。該矩陣不是必需的。如果您沒有第二個傳感器。
IMU 以 m/s 為單位提供加速度。我們可以使用這個加速度來更新位置和速度。
在我們可以使用加速之前。我們需要從身體框架轉換到局部框架。我們可以使用 IMU 的絕對方向。通過使用方向余弦矩陣,我們可以轉換兩幀之間的加速度。
我們的 U 矩陣將如下所示:
斧頭
哎
阿茲
0
0
0
Ax、Ay 和 Az 是轉換到局部坐標系的 XYZ 加速度。3 個零是我們不使用的附加輸入。我稍后會回來。
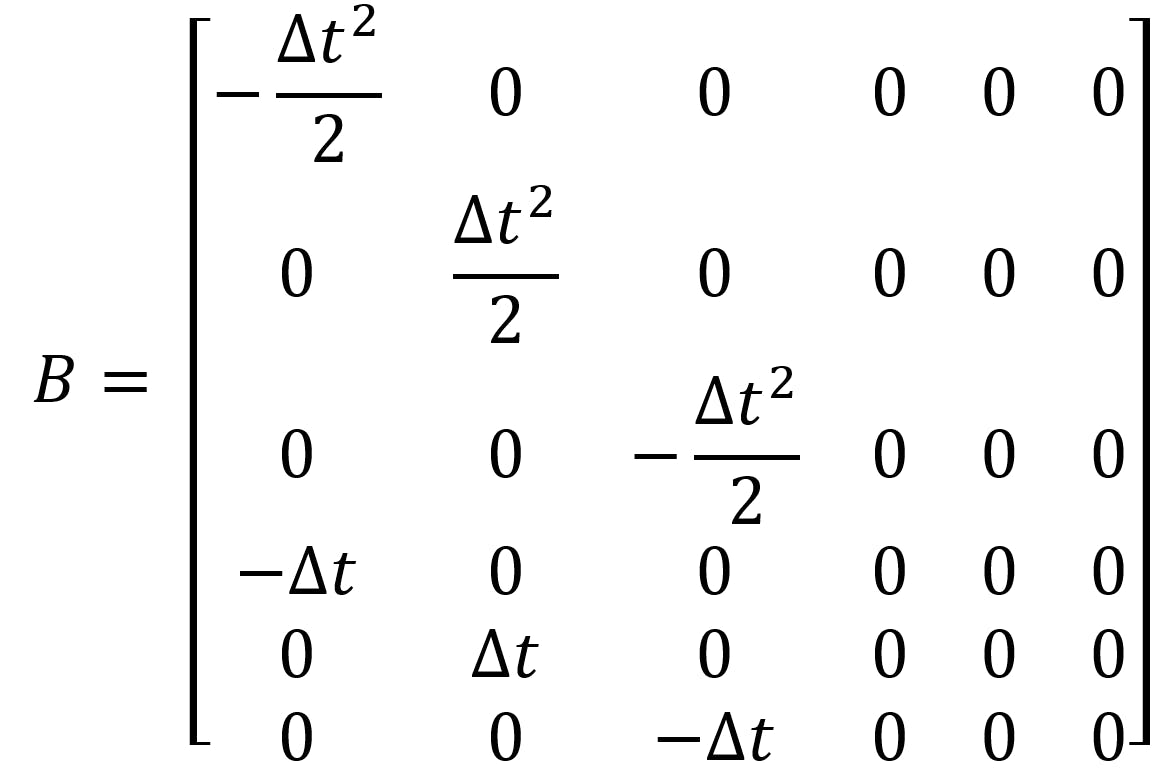
B矩陣
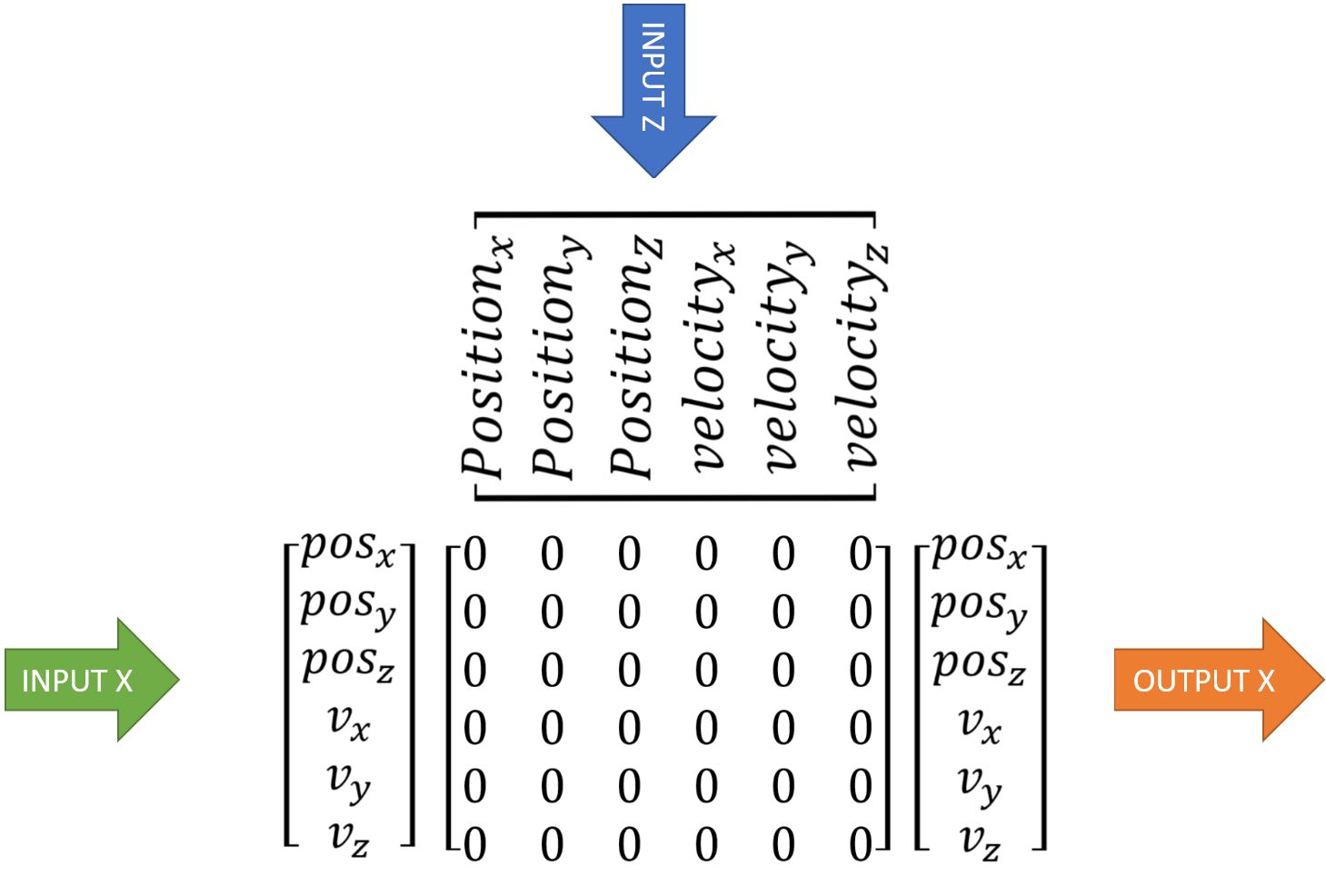
B 矩陣包含輸入 (U) 和輸出 (X) 之間的關系。它告訴卡爾曼濾波器 U 矩陣如何影響狀態(tài)(X 矩陣/輸出)。
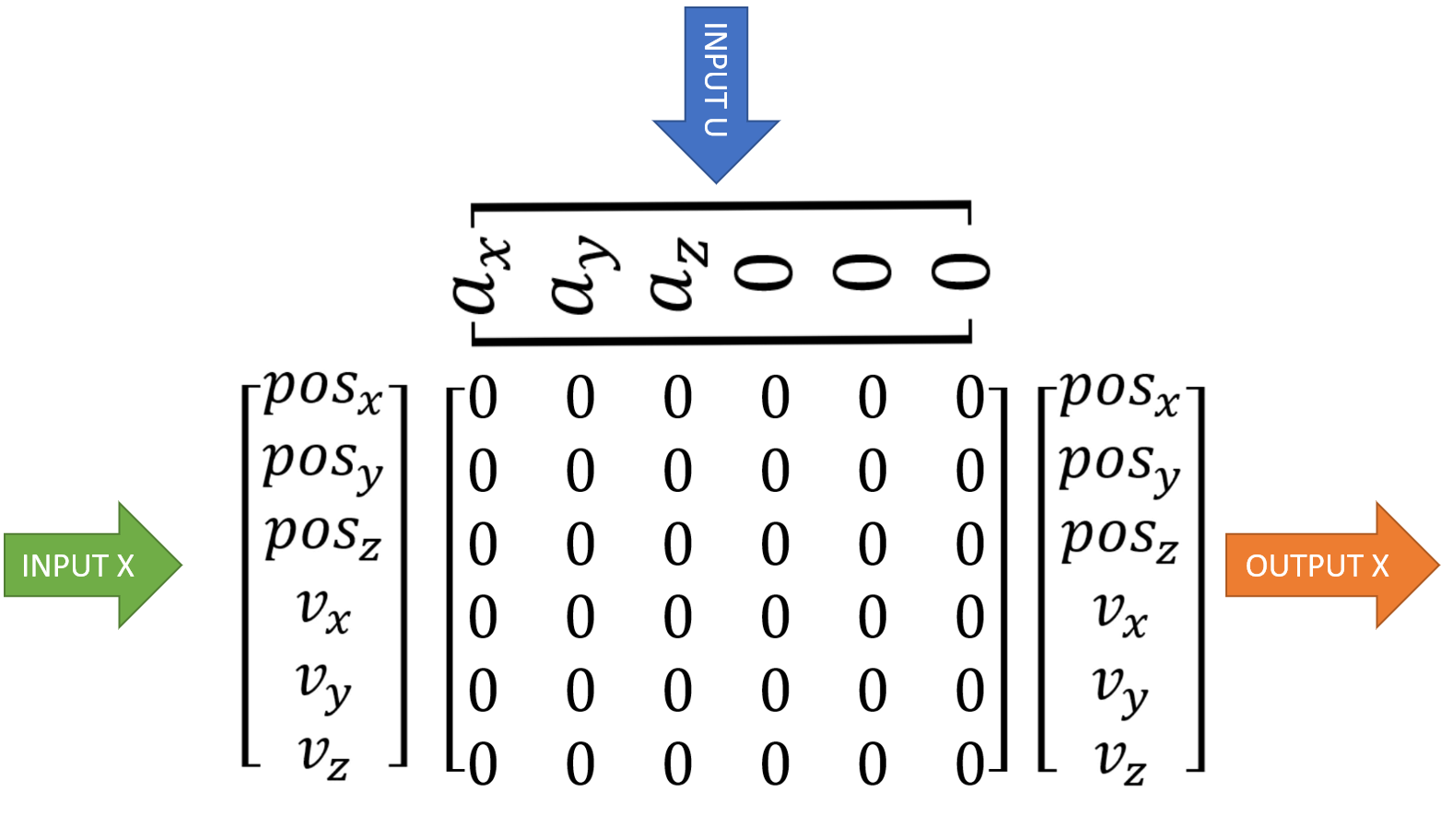
在左邊,我們有之前的狀態(tài)(X 矩陣)。在中間,我們有 B 矩陣。在頂部,我們有輸入 U 矩陣。在右邊,我們有未來狀態(tài)(輸出/X 矩陣)。我們希望通過我們的測量(U 矩陣/輸入)來影響未來的狀態(tài)/輸出。
加速度與位置之間的關系是加速度的二階導數(shù)。
deltaTime2/2
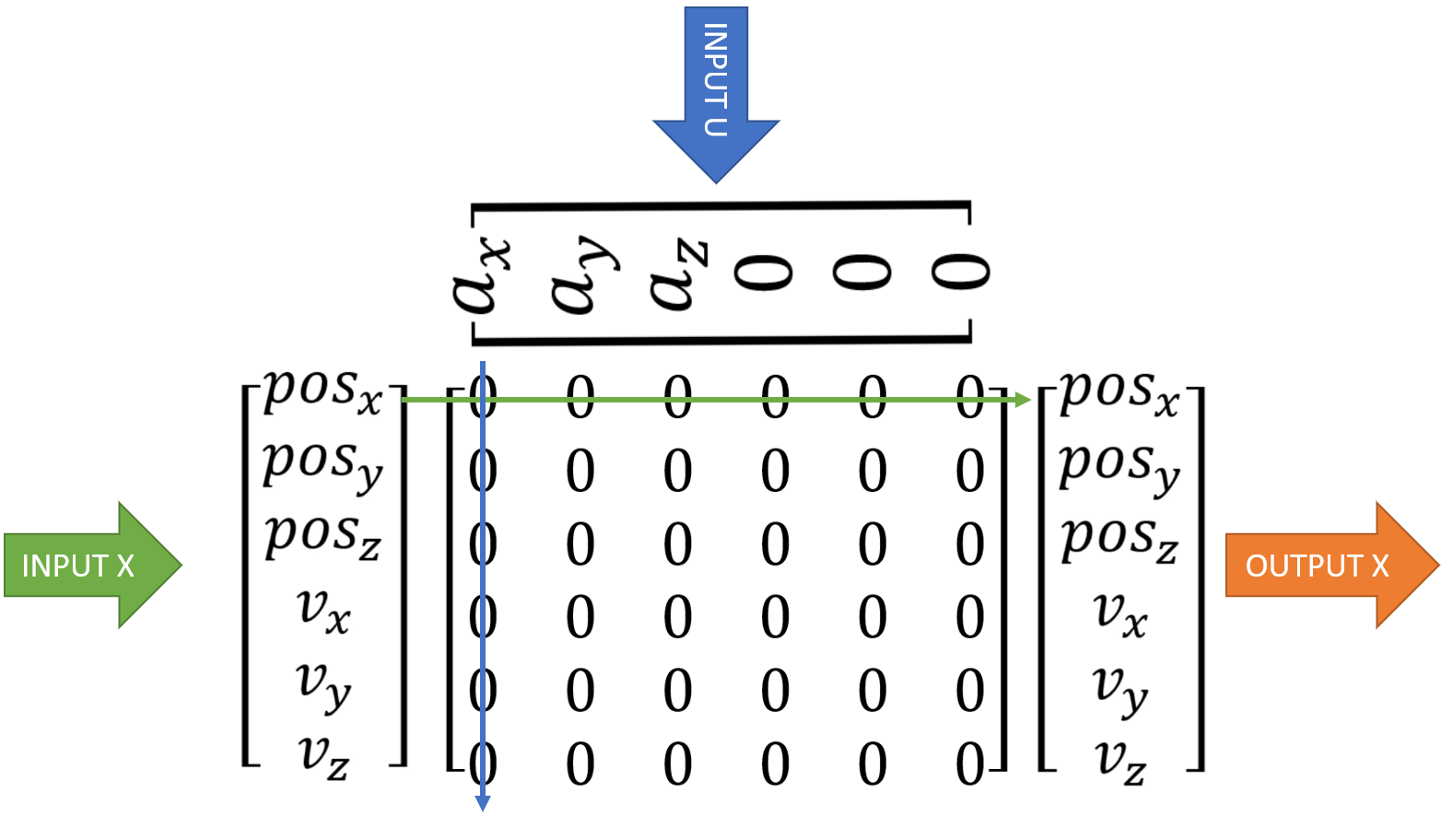
速度和加速度之間的關系是增量時間。
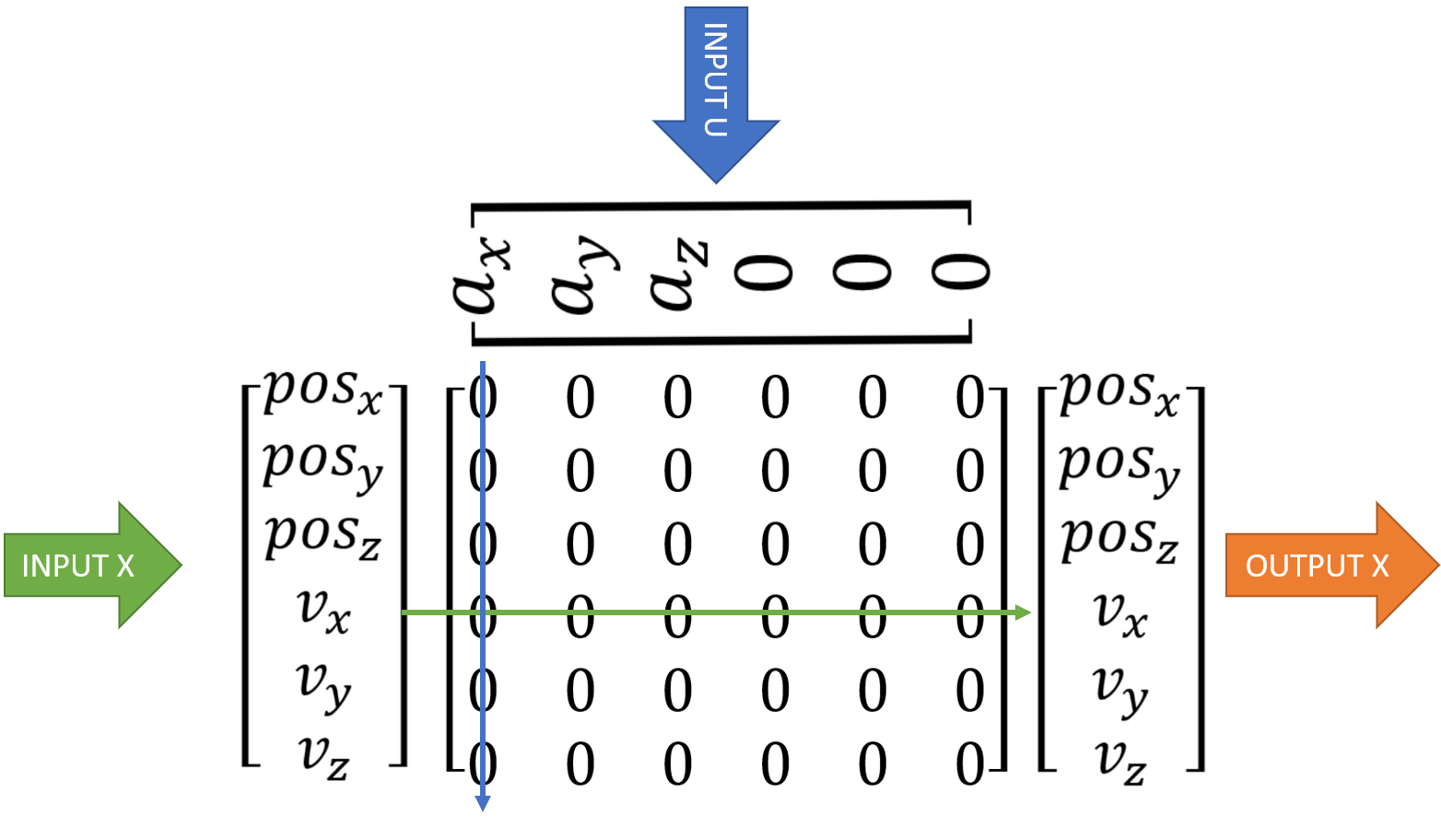
最終結果將是:
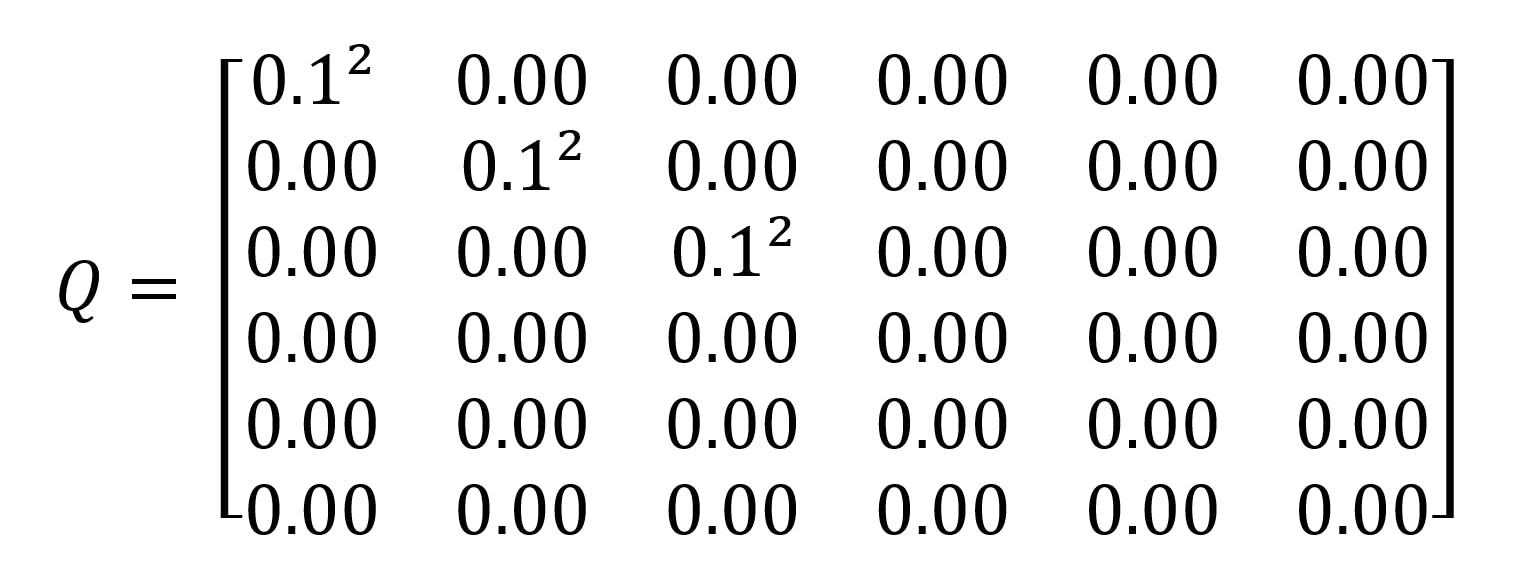
Q矩陣
Q 矩陣包含來自 U 矩陣的輸入的方差。它包含您輸入的常見錯誤。一個非常小的數(shù)字意味著您的傳感器/輸入精度很高。高數(shù)字意味著您的輸入非常不準確。除非未使用,否則不要使用 0。
您在矩陣的對角線上填寫輸入的方差。
查找輸入的方差。可以從傳感器的數(shù)據(jù)表中獲得傳感器的方差。但是,大多數(shù)時候這是錯誤的。還有另外兩種獲得方差的方法。
- 在系統(tǒng)正常運行時測量傳感器讀數(shù)。然后同時用更好的傳感器進行測量以進行比較。這種方式不太實用。除非您用來比較的測量值非常精確。
- 在系統(tǒng)空閑/不移動時測量傳感器讀數(shù)。并將傳感器讀數(shù)與 0 進行比較。這會給您帶來差異。不是最好的。
Q 矩陣可以如下所示:
Z矩陣
Z矩陣是第二個輸入矩陣。它用于狀態(tài)更新。通常你把你的低讀取頻率傳感器日期放在這里。
Z 矩陣包含 GPS 測量值。GPS 提供定位經度和緯度。long 和 lat 被轉換為 XYZ 坐標中的局部坐標系(以米為單位)。GPS還提供速度。這些是相對于北的,以公里/小時為單位。我們將速度轉換為 m/s。Z 矩陣將如下所示:
位置X
位置Y
位置Z
速度X
速度Y
速度Z

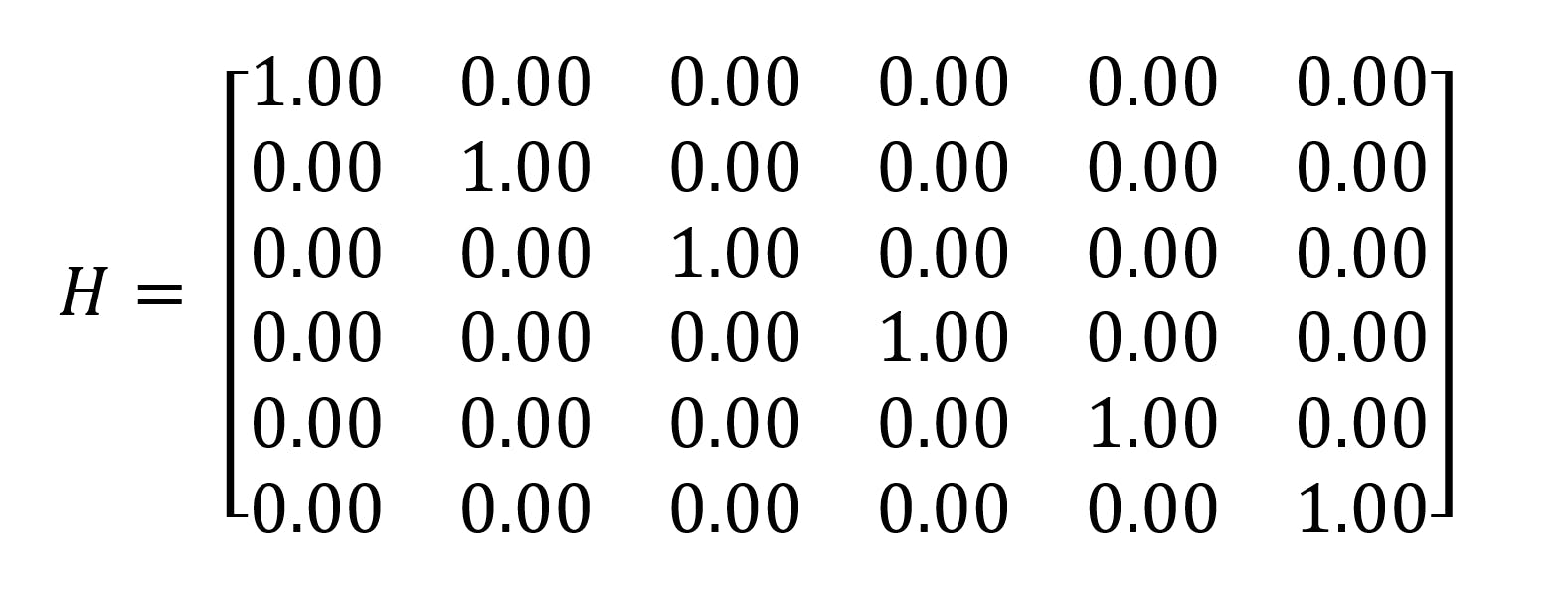
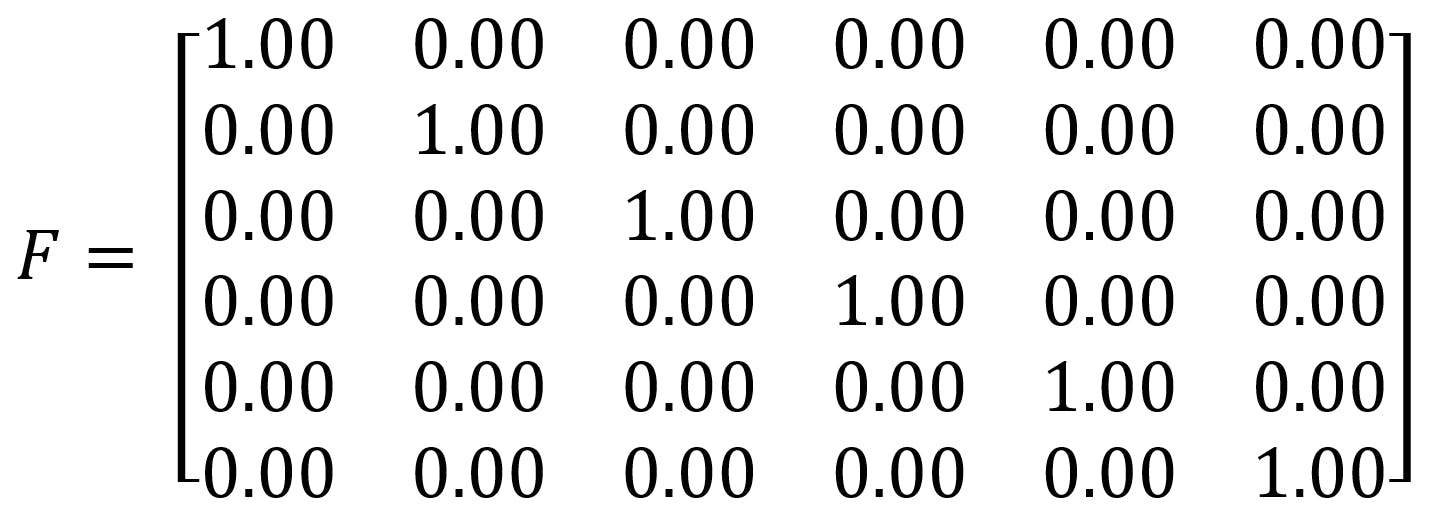
H矩陣
H 矩陣類似于 B 矩陣。它包含 Z 矩陣輸入和輸出(X 矩陣)之間的關系。填充 H 矩陣與填充 B 矩陣的過程相同。
在這種情況下,GPS 輸入與輸出(X 矩陣)具有 1 對 1 的關系。H矩陣是單位矩陣。
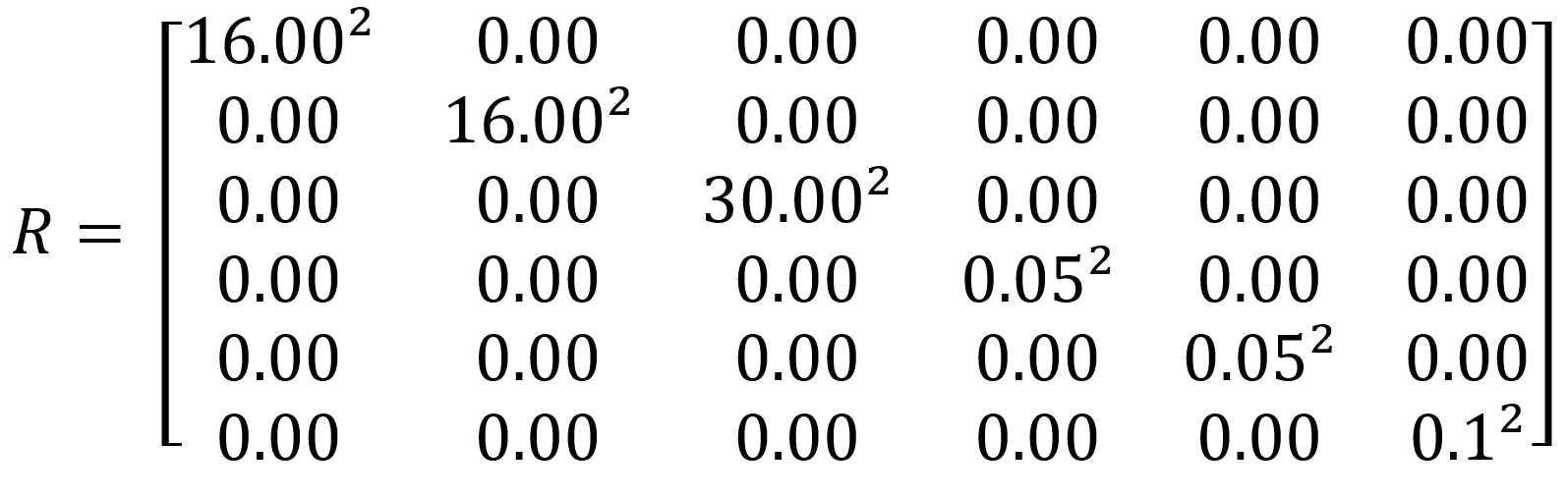
R矩陣
R 矩陣包含來自 Z 矩陣的輸入的方差。您僅使用對角線來輸入方差。可以以與 Q 矩陣的方差相同的方式得出方差。
我在機器人靜止時測量了 GPS 的偏差。這將為您提供 GPS 的變化。就我而言,R 矩陣如下所示:
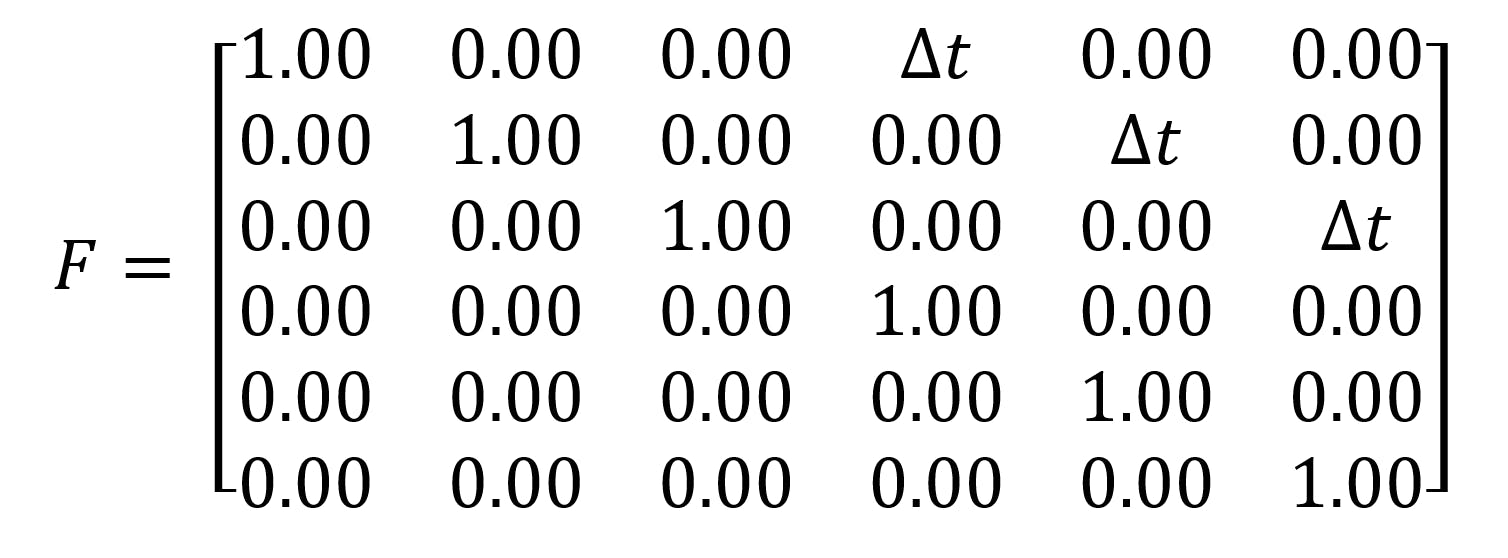
F矩陣
F 矩陣包含數(shù)據(jù)從狀態(tài)到狀態(tài)的關系。例如,速度通過增量時間影響位置。
我們想要我們未來狀態(tài)的當前位置和速度。我們希望速度通過增量時間影響位置。為了將當前狀態(tài)傳播到未來狀態(tài),我們將從一個統(tǒng)一矩陣開始。
現(xiàn)在我們希望速度通過增量時間影響位置。
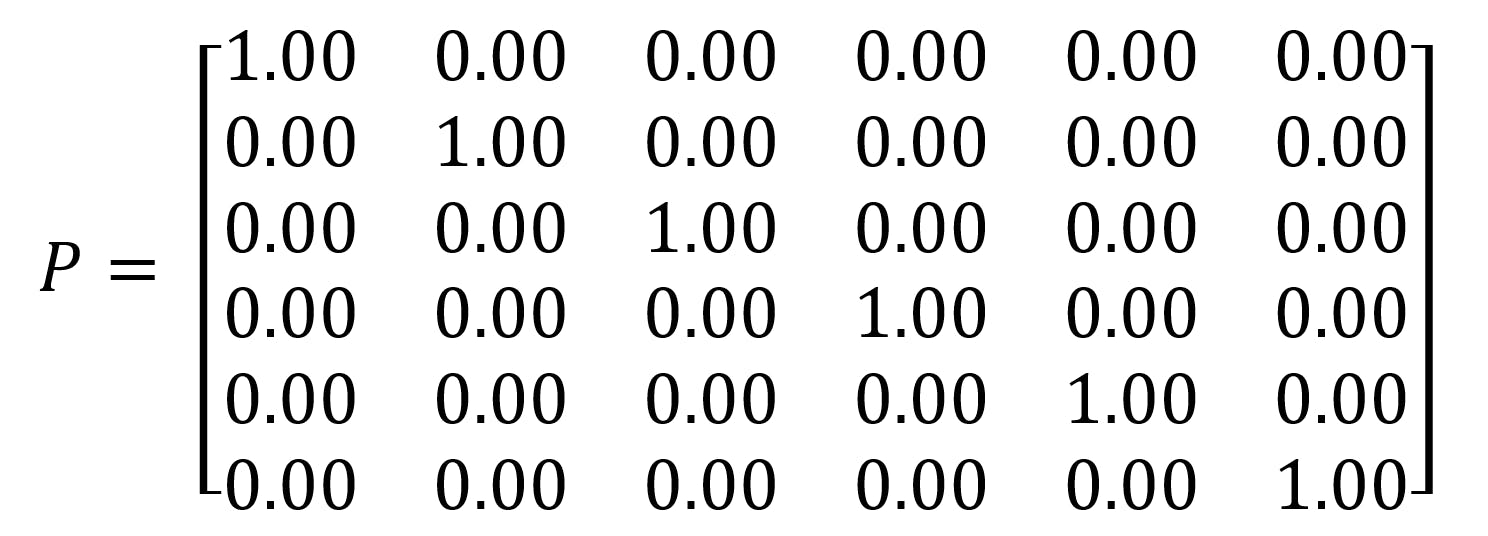
P矩陣
P 矩陣包含當前狀態(tài)的方差(X 矩陣)。卡爾曼濾波器將自行更新值。您可以將其初始化為單位矩陣。或者,您可以使用之前運行的 P 矩陣。當您使用上一次運行的 P 矩陣時。卡爾曼濾波器在開始時會更準確。
補充說明
- 卡爾曼濾波器第一次可能不起作用。這是因為方差在現(xiàn)實世界中不是恒定的。傳感器的方差是不斷變化的。GPS模塊在機器人移動時更加準確。當機器人空閑時,加速度為零。這是非常精確的。因為我們知道機器人何時移動。您知道您的電機何時通電。
- 優(yōu)化卡爾曼濾波器非常重要。必須在過濾器運行時調整方差。
- 協(xié)方差矩陣(Q 和 R)之間的比率比數(shù)字更重要。
- 當您知道輸入錯誤時覆蓋輸入是個好主意。如果您知道實數(shù),覆蓋它可能會有所幫助。
結論
卡爾曼濾波器是過濾噪聲和組合傳感器的好算法。但是,它有其局限性。這不是魔術。如果您的傳感器數(shù)據(jù)是垃圾,卡爾曼濾波器的結果也不會好很多。IMU的不一致是個大問題。GPS模塊的多路徑是一個問題。有些是可以解決的。您可以使用更多高質量的傳感器。但它變得非常迅速。
在我的項目中。卡爾曼濾波器改進了定位。但我從來沒有讓它按我的意愿工作。獲得低于 1 米的精度很難。
- 卡爾曼濾波(KF)與擴展卡爾曼(EKF) 3次下載
- 卡爾曼濾波器及其應用基礎.敬喜編 0次下載
- 多旋翼飛行器設計與控制的卡爾曼濾波器 0次下載
- 基于卡爾曼濾波器的PID設計教程 37次下載
- 使用FPGA實現(xiàn)自適應卡爾曼濾波器的設計論文說明 22次下載
- 使用FPGA實現(xiàn)自適應卡爾曼濾波器的設計論文說明 13次下載
- 卡爾曼濾波器及其應用基礎PDF電子書免費下載 59次下載
- 卡爾曼濾波器及其工程應用的詳細資料說明 4次下載
- MPU6050_卡爾曼濾波器 41次下載
- 一種基于增量式卡爾曼濾波器的PMSM轉速濾波算法_肖曦 5次下載
- 卡爾曼濾波器[附帶例程]通俗易懂 17次下載
- 卡爾曼濾波器參數(shù)分析與應用方法研究 6次下載
- 卡爾曼濾波器原理簡介 60次下載
- 卡爾曼濾波器在入侵檢測中的應用
- 卡爾曼濾波器原理 0次下載
- 卡爾曼濾波是什么 卡爾曼濾波與目標追蹤技術分析 602次閱讀
- 卡爾曼濾波家族 719次閱讀
- 卡爾曼濾波算法的基本原理 1538次閱讀
- 什么是卡爾曼濾波?卡爾曼濾波過程步驟 1900次閱讀
- 卡爾曼濾波的數(shù)學基礎 744次閱讀
- 卡爾曼濾波器原理分析 878次閱讀
- 濾波算法:經典卡爾曼濾波 1045次閱讀
- 卡爾曼濾波是如何看到你的問題的 880次閱讀
- 擴展卡爾曼濾波的原理 5335次閱讀
- 卡爾曼濾波器的基本原理 5774次閱讀
- 詳解卡爾曼濾波器的工作原理 3697次閱讀
- 卡爾曼濾波器:通過位置數(shù)據(jù)得出速度值 1.1w次閱讀
- 什么是卡爾曼濾波? 淺談卡爾曼濾波眼里的機器人問題 8134次閱讀
- 平衡小車卡爾曼濾波算法使用心得 1.5w次閱讀
- 一文看懂mpu6050卡爾曼濾波程序 7.3w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 2使用TL431設計電源
- 0.67 MB | 2次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統(tǒng)
- 0.85 MB | 1次下載 | 1 積分
- 5LabVIEW環(huán)形控件
- 0.01 MB | 1次下載 | 1 積分
- 6PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 751單片機核心板原理圖
- 0.12 MB | 1次下載 | 5 積分
- 8BP2879DB支持調光調滅的非隔離低 PF LED 驅動器
- 1.44 MB | 1次下載 | 免費
本月
- 1開關電源設計原理手冊
- 1.83 MB | 54次下載 | 免費
- 2FS5080E 5V升壓充電兩串鋰電池充電管理IC中文手冊
- 8.45 MB | 23次下載 | 免費
- 3DMT0660數(shù)字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 12次下載 | 免費
- 5ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 6TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 7STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 8基于MSP430FR6043的超聲波氣體流量計快速入門指南
- 2.26MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監(jiān)
工商網監(jiān)
評論