 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
Zynqberry 一直是我最喜歡的開發板之一,到目前為止,我覺得我主要只是花時間將我的基礎設計更新到最新版本的 Xilinx IDE,然后才再次擺脫它。幸運的是,這一次我對版本 2019.2 的更新非常順利,以至于我的小 Zynqberry 已經準備好種植自己的小項目花園(對不起,我無法抗拒可怕的雙關語)。
我的第一個想法自然是如何開始移植我以前的 Raspberry Pi 項目,因為 Zynqberry 被設計為 Raspberry Pi FPGA 的替代品。我在之前的項目中創建的 Zynqberry 基礎設計涵蓋了使用 Zynqberry 板上所有外設所需的硬件框架。通過與 Raspberry Pi 等效的硬件設計,這使得主要區別在于 Zynqberry 上的嵌入式 Linux 映像。
為了使 Zynqberry 上的操作系統與常見的 Raspberry Pi 映像(如 Raspbian)更加模棱兩可,安裝 Python 及其功能(如軟件包安裝程序 pip)是我的第一步。
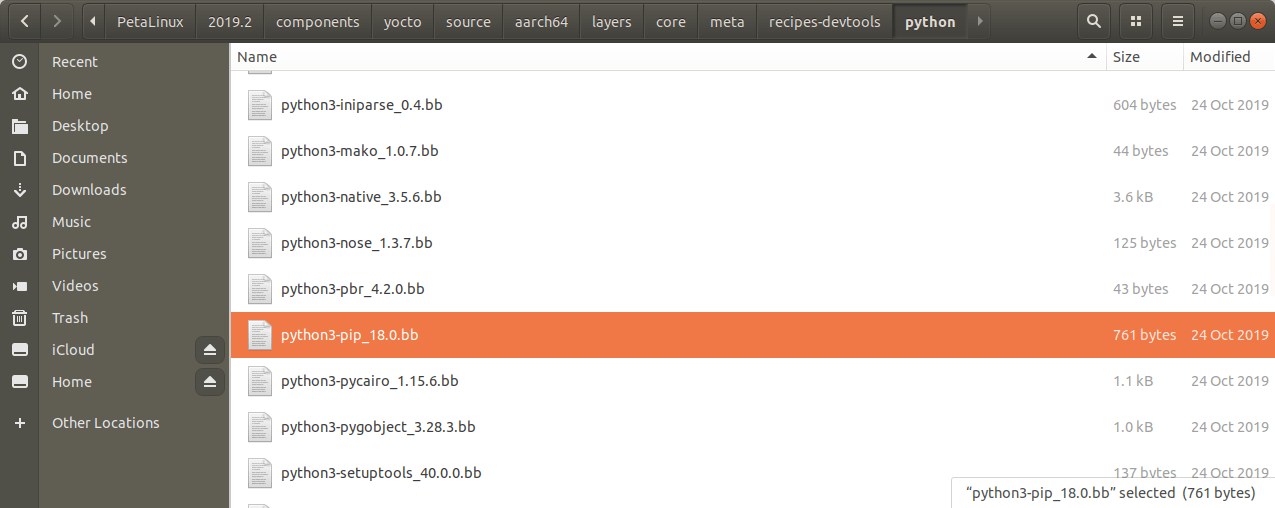
構建 PetaLinux 環境的 Yocto 框架包含 bitbake 配方,允許幾乎所有標準 Linux 庫包含在構建中。
要將庫添加到您的構建中,請將行“CONFIG_”添加到位于/project-spec/meta-user/conf/目錄中的user-rootfsconfig文件。
# System tools
CONFIG_gsl
CONFIG_nano
CONFIG_cmake
# Python3
CONFIG_python3
CONFIG_python3-pip
CONFIG_python3-cffi
CONFIG_python3-numpy
CONFIG_python3-shell
CONFIG_python3-pyserial
CONFIG_python3-threading
CONFIG_python3-multiprocessing
我選擇添加 Python3 包,因為我的大多數 Raspberry Pi 項目都基于依賴于 Python3 的 Adafruit 的 CircuitPython。我注意到我在 Raspberry Pi 上使用的其他一些常用庫/工具是 cmake(用于構建和打包軟件的開源工具集)、GSL(GNU 科學庫)和 nano(文本編輯器)。
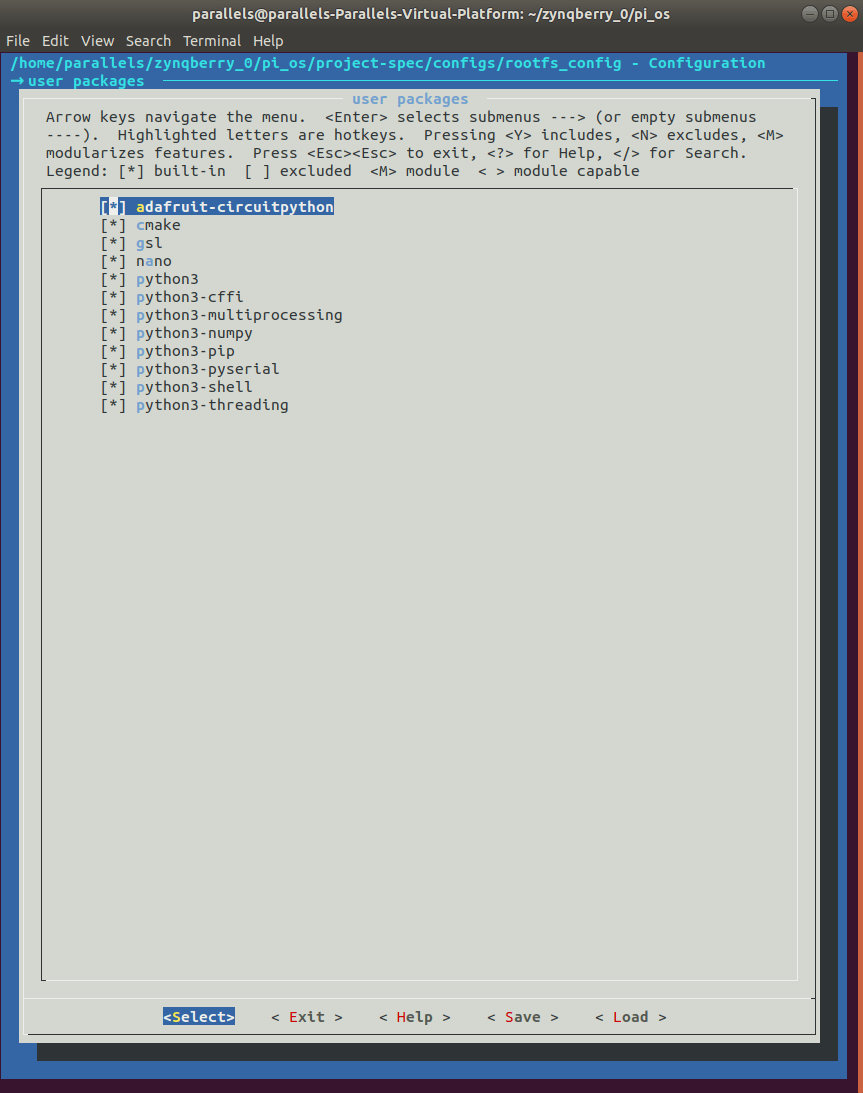
將庫添加到項目后,通過運行根文件系統的配置編輯器在映像中啟用它們:
petalinux-config -c rootfs
然后在用戶包下,選擇每個庫并使用“Y”鍵啟用它們。
由于包管理器(如 Python 的 pip)會在安裝指定包時自動解決任何缺失的依賴項,因此需要互聯網連接。要啟用以太網端口并使其在 Linux 用戶空間中可用,需要編輯內核并創建基本 TCP/IP 網絡初始化腳本和配置文件的核心配方。
要編輯內核,請運行內核配置編輯器:
petalinux-config -c kernel
使用以下選項配置內核:
CONFIG_MII=y
CONFIG_XILINX_GMII2RGMII=y
CONFIG_USB_USBNET=y
CONFIG_USB_NET_AX8817X=y
CONFIG_USB_NET_AX88179_178A=y
CONFIG_USB_NET_CDCETHER=y
# CONFIG_USB_NET_CDC_EEM is not set
CONFIG_USB_NET_CDC_NCM=y
# CONFIG_USB_NET_HUAWEI_CDC_NCM is not set
# CONFIG_USB_NET_CDC_MBIM is not set
# CONFIG_USB_NET_DM9601 is not set
# CONFIG_USB_NET_SR9700 is not set
# CONFIG_USB_NET_SR9800 is not set
# CONFIG_USB_NET_SMSC75XX is not set
CONFIG_USB_NET_SMSC95XX=y
# CONFIG_USB_NET_GL620A is not set
CONFIG_USB_NET_NET1080=y
# CONFIG_USB_NET_PLUSB is not set
# CONFIG_USB_NET_MCS7830 is not set
# CONFIG_USB_NET_RNDIS_HOST is not set
CONFIG_USB_NET_CDC_SUBSET_ENABLE=y
CONFIG_USB_NET_CDC_SUBSET=y
# CONFIG_USB_ALI_M5632 is not set
# CONFIG_USB_AN2720 is not set
CONFIG_USB_BELKIN=y
CONFIG_USB_ARMLINUX=y
# CONFIG_USB_EPSON2888 is not set
# CONFIG_USB_KC2190 is not set
CONFIG_USB_NET_ZAURUS=y
# CONFIG_USB_NET_CX82310_ETH is not set
# CONFIG_USB_NET_KALMIA is not set
# CONFIG_USB_NET_QMI_WWAN is not set
# CONFIG_USB_NET_INT51X1 is not set
# CONFIG_USB_SIERRA_NET is not set
# CONFIG_USB_VL600 is not set
# CONFIG_USB_NET_CH9200 is not set
CONFIG_FB_SIMPLE=y
# CONFIG_FRAMEBUFFER_CONSOLE is not set
CONFIG_SND_SIMPLE_CARD_UTILS=y
CONFIG_SND_SIMPLE_CARD=y
CONFIG_USBIP_CORE=y
# CONFIG_USBIP_VHCI_HCD is not set
# CONFIG_USBIP_HOST is not set
# CONFIG_USBIP_VUDC is not set
# CONFIG_USBIP_DEBUG is not set
為基本 TCP/IP 網絡初始化腳本和配置文件的核心配方創建目錄:
mkdir project path>/project-spec/meta-user/recipes-core/init-ifupdown/init-ifupdown-1.0
創建接口文件,
cat ./interfaces
并向其中添加以下內容:
auto lo
iface lo inet loopback
## Static IP example
#auto eth0
#iface eth0 inet static
# address 192.168.1.190
# netmask 255.255.255.0
# network 192.168.1.0
# gateway 192.168.1.1
## DHCP Example
auto eth0
iface eth0 inet dhcp
然后在/project-spec/meta-user/recipes-core/init-ifupdown目錄中為 init-ifupdown 包創建名為init-ifupdown_1.0.bbappend的 bitbake 文件,并將以下行添加到它:
FILESEXTRAPATHS_prepend := "${THISDIR}/init-ifupdown-1.0:"
內核需要通過設備樹指定給它的以太網硬件的鉤子。在/project-spec/meta-user/recipes-bsp/device-tree/files/目錄中編輯用戶可配置的設備樹源文件 system-user.dtsi 。以下是 Zynqberry 上所有外圍設備的最全面的設備樹:
/include/ "system-conf.dtsi"
/ {
aliases{
eth0 = &usb0;
};
};
/ {
#address-cells = <1>;
#size-cells = <1>;
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
hdmi_fb_reserved_region@1FC00000 {
compatible = "removed-dma-pool";
no-map;
// 512M (M modules)
reg = <0x1FC00000 0x400000>;
// 128M (R modules)
//reg = <0x7C00000 0x400000>;
};
camera_fb_reserved_region@1FC00000 {
compatible = "removed-dma-pool";
no-map;
// 512M (M modules)
reg = <0x1FC00000 0x400000>;
// 128M (R modules)
//reg = <0x7800000 0x400000>;
};
};
hdmi_fb: framebuffer@0x1FC00000 { // HDMI out
compatible = "simple-framebuffer";
// 512M (M modules)
reg = <0x1FC00000 (1280 * 720 * 4)>; // 720p
// 128M (R modules)
//reg = <0x7C00000 (1280 * 720 * 4)>; // 720p
width = <1280>; // 720p
height = <720>; // 720p
stride = <(1280 * 4)>; // 720p
format = "a8b8g8r8";
status = "okay";
};
camera_fb: framebuffer@0x1FC00000 { // CAMERA in
compatible = "simple-framebuffer";
// 512M (M modules)
reg = <0x1FC00000 (1280 * 720 * 4)>; // 720p
// 128M (R modules)
//reg = <0x7800000 (1280 * 720 * 4)>; // 720p
width = <1280>; // 720p
height = <720>; // 720p
stride = <(1280 * 4)>; // 720p
format = "a8b8g8r8";
};
vcc_3V3: fixedregulator@0 {
compatible = "regulator-fixed";
regulator-name = "vccaux-supply";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
};
};
&qspi {
#address-cells = <1>;
#size-cells = <0>;
status = "okay";
flash0: flash@0 {
compatible = "jedec,spi-nor";
reg = <0x0>;
#address-cells = <1>;
#size-cells = <1>;
spi-max-frequency = <50000000>;
partition@0x00000000 {
label = "boot";
reg = <0x00000000 0x00500000>;
};
partition@0x00500000 {
label = "bootenv";
reg = <0x00500000 0x00020000>;
};
partition@0x00520000 {
label = "kernel";
reg = <0x00520000 0x00a80000>;
};
partition@0x00fa0000 {
label = "spare";
reg = <0x00fa0000 0x00000000>;
};
};
};
/*
* We need to disable Linux VDMA driver as VDMA
* already configured in FSBL
*/
&video_in_axi_vdma_0 {
status = "disabled";
};
&video_out_axi_vdma_0 {
status = "disabled";
};
&video_out_v_tc_0 {
//xilinx-vtc: probe of 43c20000.v_tc failed with error -2
status = "disabled";
};
&gpio0 {
interrupt-controller;
#interrupt-cells = <2>;
};
&i2c1 {
#address-cells = <1>;
#size-cells = <0>;
i2cmux0: i2cmux@70 {
compatible = "nxp,pca9544";
#address-cells = <1>;
#size-cells = <0>;
reg = <0x70>;
i2c1@0 {
#address-cells = <1>;
#size-cells = <0>;
reg = <0>;
id_eeprom@50 {
compatible = "atmel,24c32";
reg = <0x50>;
};
};
i2c1@1 { // Display Interface Connector
#address-cells = <1>;
#size-cells = <0>;
reg = <1>;
};
i2c1@2 { // HDMI Interface Connector
#address-cells = <1>;
#size-cells = <0>;
reg = <2>;
};
i2c1@3 { // Camera Interface Connector
#address-cells = <1>;
#size-cells = <0>;
reg = <3>;
};
};
};
/{
usb_phy0: usb_phy@0 {
compatible = "ulpi-phy";
#phy-cells = <0>;
reg = <0xe0002000 0x1000>;
view-port = <0x0170>;
drv-vbus;
};
};
&usb0 {
usb-phy = <&usb_phy0>;
};
/*
* Sound configuration
*/
/{
// Custom driver based on spdif-transmitter
te_audio: dummy_codec_te {
compatible = "te,te-audio";
#sound-dai-cells = <0>;
};
// Simple Audio Card from AXI_I2S and custom XADC audio input and
// PWM audio output cores
sound {
compatible = "simple-audio-card";
simple-audio-card,name = "TE0726-PWM-Audio";
simple-audio-card,format = "i2s";
simple-audio-card,widgets =
"Microphone", "In Jack",
"Line", "Line In Jack",
"Line", "Line Out Jack",
"Headphone", "Out Jack";
simple-audio-card,routing =
"Out Jack", "te-out",
"te-in", "In Jack";
simple-audio-card,cpu {
sound-dai = <&audio_axi_i2s_adi_0>;
};
simple-audio-card,codec {
sound-dai = <&te_audio>;
};
};
};
&audio_axi_i2s_adi_0 {
compatible = "adi,axi-i2s-1.00.a";
reg = <0x43c00000 0x1000>;
clocks = <&clkc 15>, <&clkc 18>; // FCLK_CLK0, FCLK_CLK3
clock-names = "axi", "ref";
dmas = <&dmac_s 0 &dmac_s 1>;
dma-names = "tx", "rx";
#sound-dai-cells = <0>;
};
/*
* We need to disable Linux XADC driver to use XADC for audio recording
*/
&adc {
status = "disabled";
};
Zynqberry 板上的 Zynq 芯片無法直接訪問以太網端口。四個 USB 端口和以太網端口實際上連接到 USB PHY 集線器,該集線器連接到 Zynq 芯片的 USB0 MIO 端口。這就是以太網設備 eth0 綁定到設備樹中 USB0 節點的原因。
此時,保存并關閉所有文件,然后構建項目。
petalinux-build
打包啟動映像并使用 Vitis 將其編程到 Zynqberry 的 QSPI 閃存中。然后將內核、設備樹 blob 和根文件系統復制到 SD 卡。(我已經在我的上一篇 Zynqberry 項目帖子中介紹了這些步驟)。
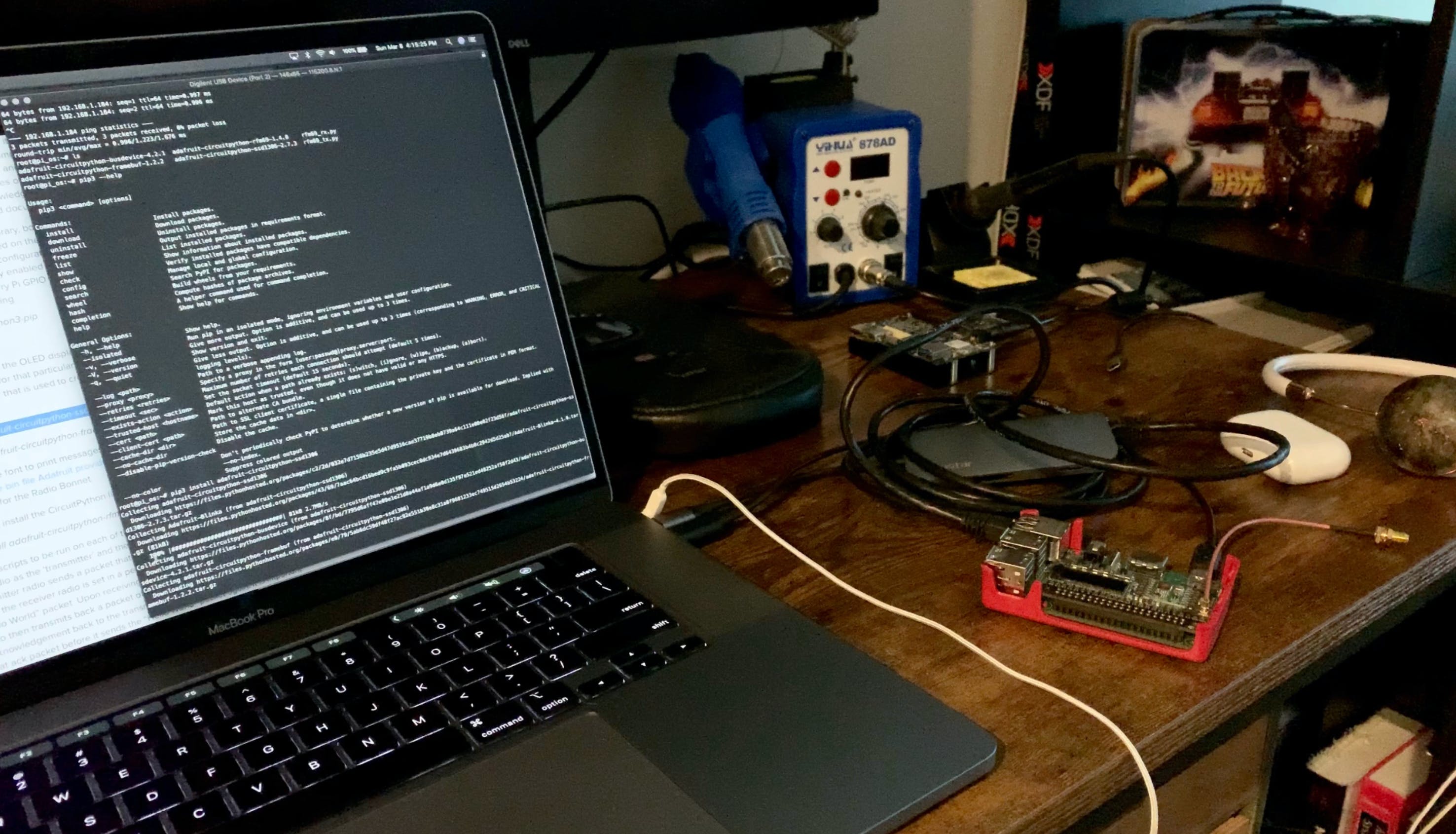
啟動 Zynqberry 并使用默認用戶名“root”和默認密碼“root”登錄(除非您選擇在系統配置編輯器中更改它)。您可以將 Zynqberry 的以太網端口直接插入路由器,或者使用 PC 上的互聯網共享。我選擇了后一個選項,因為我的路由器不在我無法訪問的修道院位置。由于 Ubuntu 在我計算機上的虛擬機中運行,因此我也將這部分切換回 Mac 端。
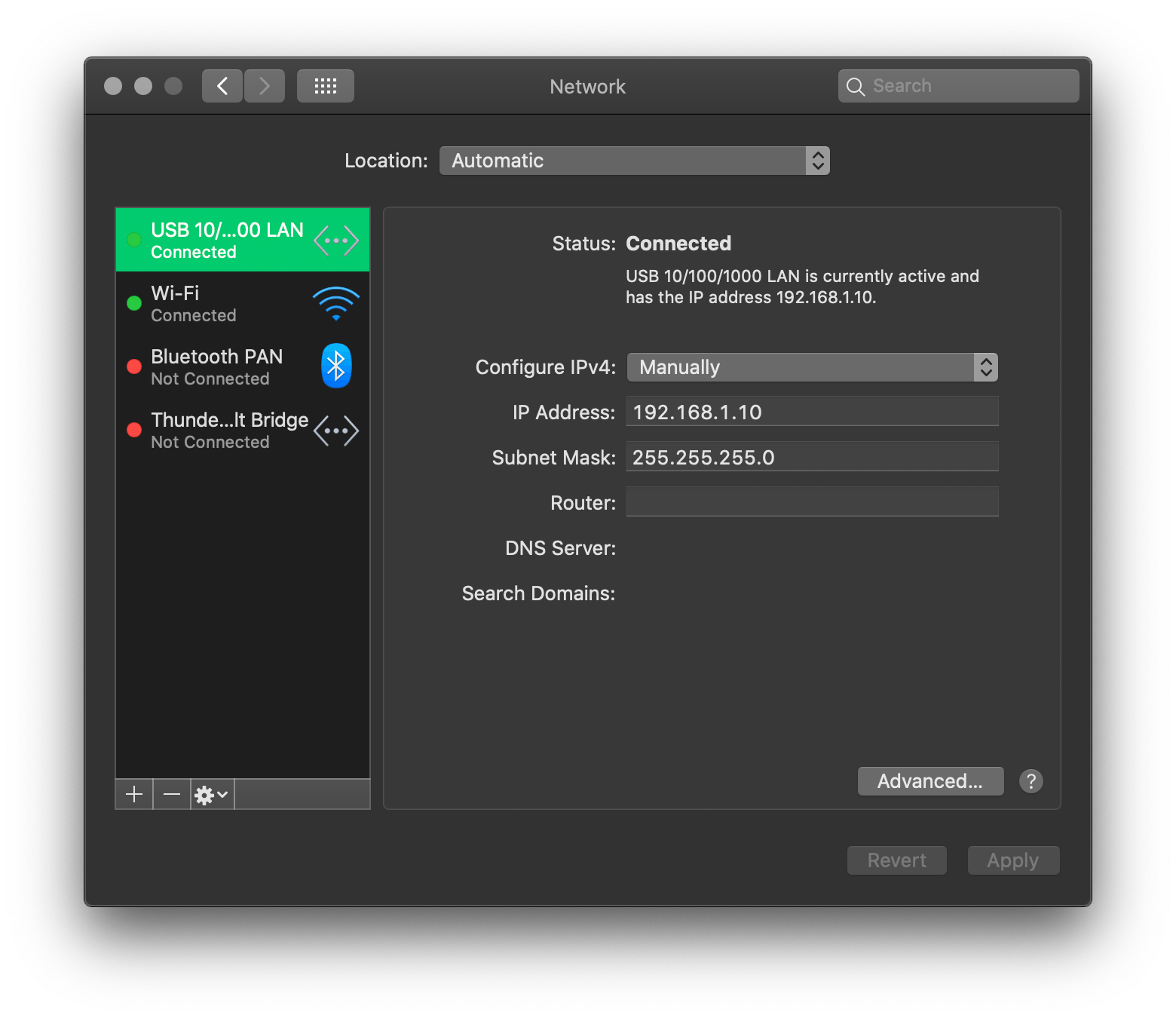
通過 USB-C 轉以太網橋適配器,我將其配置為 Zynqberry 和我的 MacBook 之間的迷你路由器。為此,我通過為 LAN 網橋提供與我在 Zynqberry 上配置接口文件相同的網絡和子網掩碼上的不同 IP 地址。
旁注:不要將路由器的網關地址添加到 LAN 網橋配置中,這將與您的計算機與路由器的連接發生沖突。
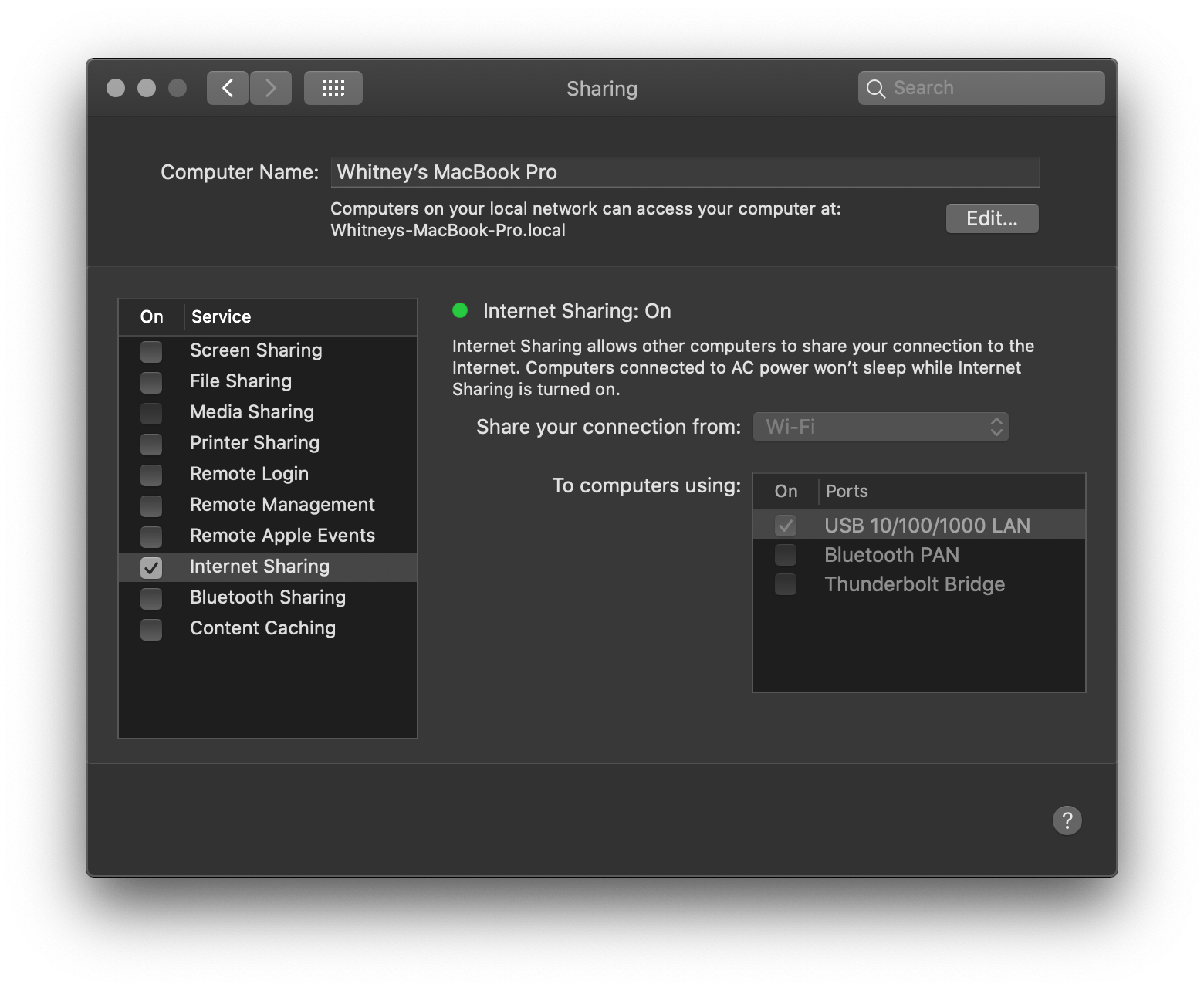
然后我啟用了 LAN 網橋的 Internet 共享:
為了測試 MacBook 和 Zynqberry 之間的初始連接,我打開了一個終端窗口并將我的路由器通過 DHCP 分配給 Zynqberry 的 IP 地址 ping 通:
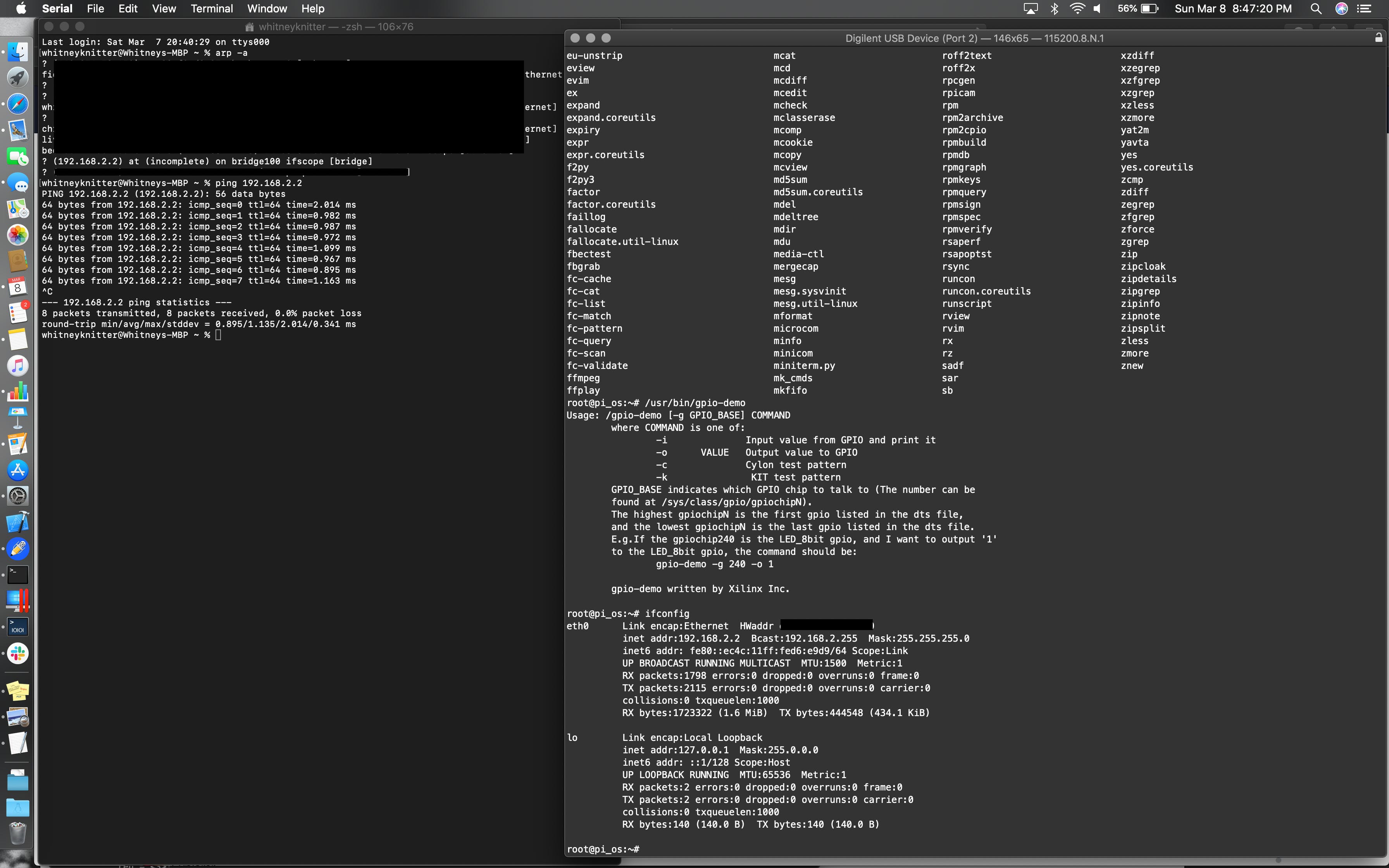
然后我通過安裝一個基本的 Adafruit 庫來測試互聯網連接:
pip3 install adafruit-blinka
請繼續關注我的下一個項目,內容包括如何在 Zynqberry 上安裝 Adafruit 的 CircuitPython!
?
- Linux操作系統的CP命令源代碼匯總 4次下載
- 機器人操作系統EtherCAT技術研究綜述 1次下載
- 三寶機器人軟件操作系統v2.20.33.100下載 3次下載
- 單片機編程和操作系統綜述 40次下載
- RTThread操作系統的調度設計原理是怎樣的
- 嵌入式操作系統的介紹和嵌入式操作系統的發展狀況和應用前景說明
- 操作系統是什么?Linux操作系統的原理與應用資料概述 13次下載
- Linux操作系統下C語言編程入門.pdf 95次下載
- RTOS操作系統 0次下載
- 計算機操作系統試題及答案
- 操作系統講解(操作系統課件) 0次下載
- Linux操作系統原理及應用 0次下載
- 操作系統 ppt 0次下載
- 操作系統技巧使用大全
- ucos操作系統.
- 深度解析全球操作系統格局 675次閱讀
- 詳解實時操作系統和非實時操作系統 3520次閱讀
- 什么是實時操作系統(RTOS) 4347次閱讀
- Linux是實時系統還是分時操作系統? 1414次閱讀
- linux操作系統基礎知識 5829次閱讀
- 物聯網十大經典開源操作系統 1w次閱讀
- 對實時操作系統特性的討論 5039次閱讀
- 嵌入式操作系統是什么_嵌入式操作系統有哪些 2w次閱讀
- 如何設計一個小型嵌入式操作系統 9351次閱讀
- 國產操作系統究竟哪里不行_國產操作系統為何難普及 1.3w次閱讀
- 國產操作系統有哪些 1.4w次閱讀
- 簡要介紹了操作系統虛擬化的概念,以及實現操作系統虛擬化的技術 1.3w次閱讀
- petalinux(二)開啟petalinux內核調試模式 1w次閱讀
- 如何安裝實時操作系統RTOS 6105次閱讀
- 概述及匯總ARM的嵌入式操作系統 2951次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論