 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
你想要自己的遙控坦克嗎?我將描述使用智能手機通過 Wi-Fi 控制的相機創建坦克的過程。
我想傳達的主要思想是,你不應該重復這個項目,而是根據你在這里閱讀的內容,使你自己的項目獨一無二。我將向您展示我的坦克示例,但此處概述的原則可應用于創建其他類似的遙控車輛。
有用的信息
我會這樣寫輔助信息。此信息無需閱讀但仍然有用
?
?
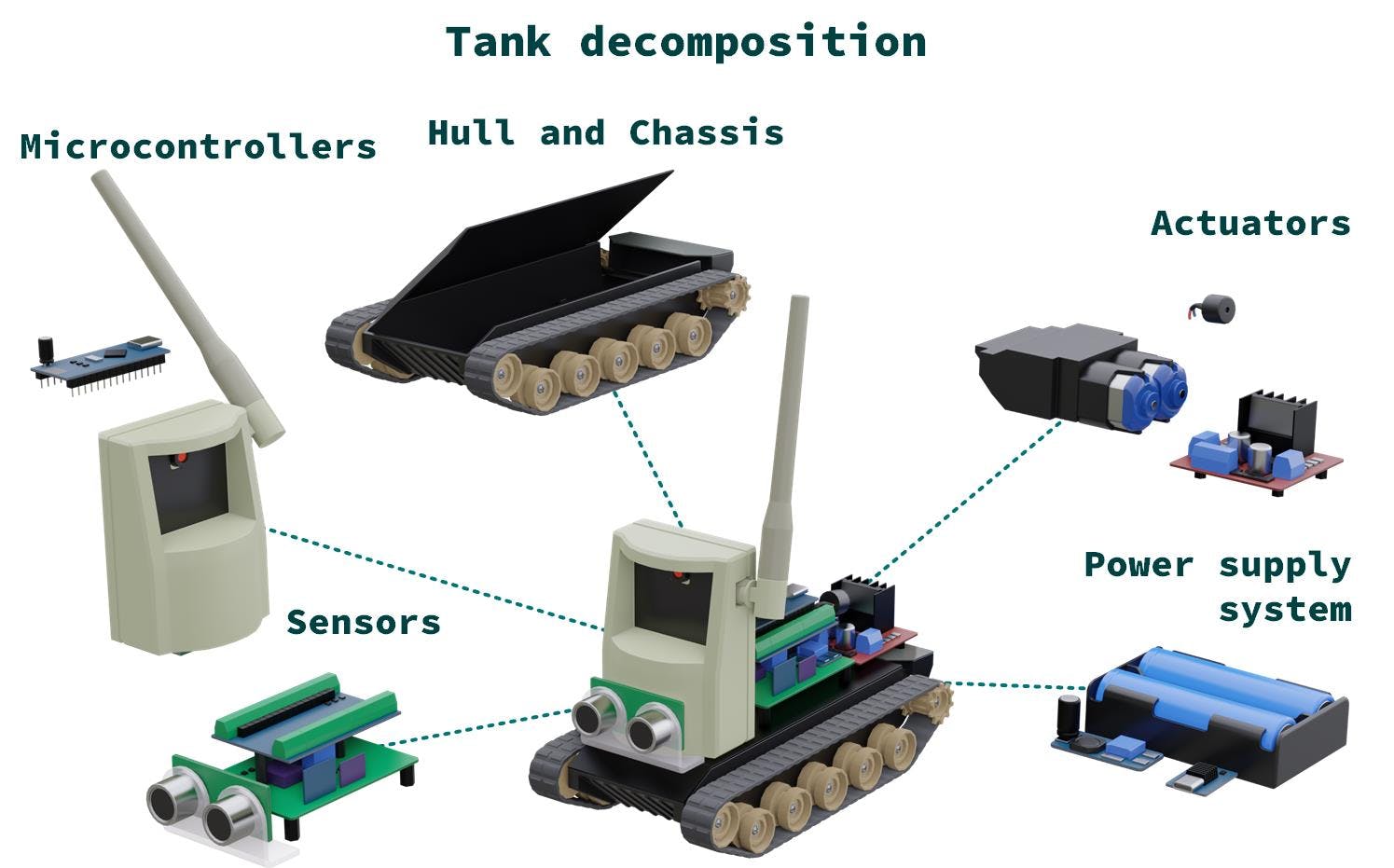
船體和底盤
您可以在車輛上放置什么以及如何放置由車體決定,越野能力和速度取決于底盤。例如,如果你想在街上享受賽車的樂趣,你應該選擇一個有很大間隙的底盤,最好有某種懸掛系統,但如果你的設備只在你房子的平坦地板上行駛,并且沒有克服這種困難的反抗- 坦克障礙物如毛圈墊,那么你可能不會打擾 - 任何底盤都可以。
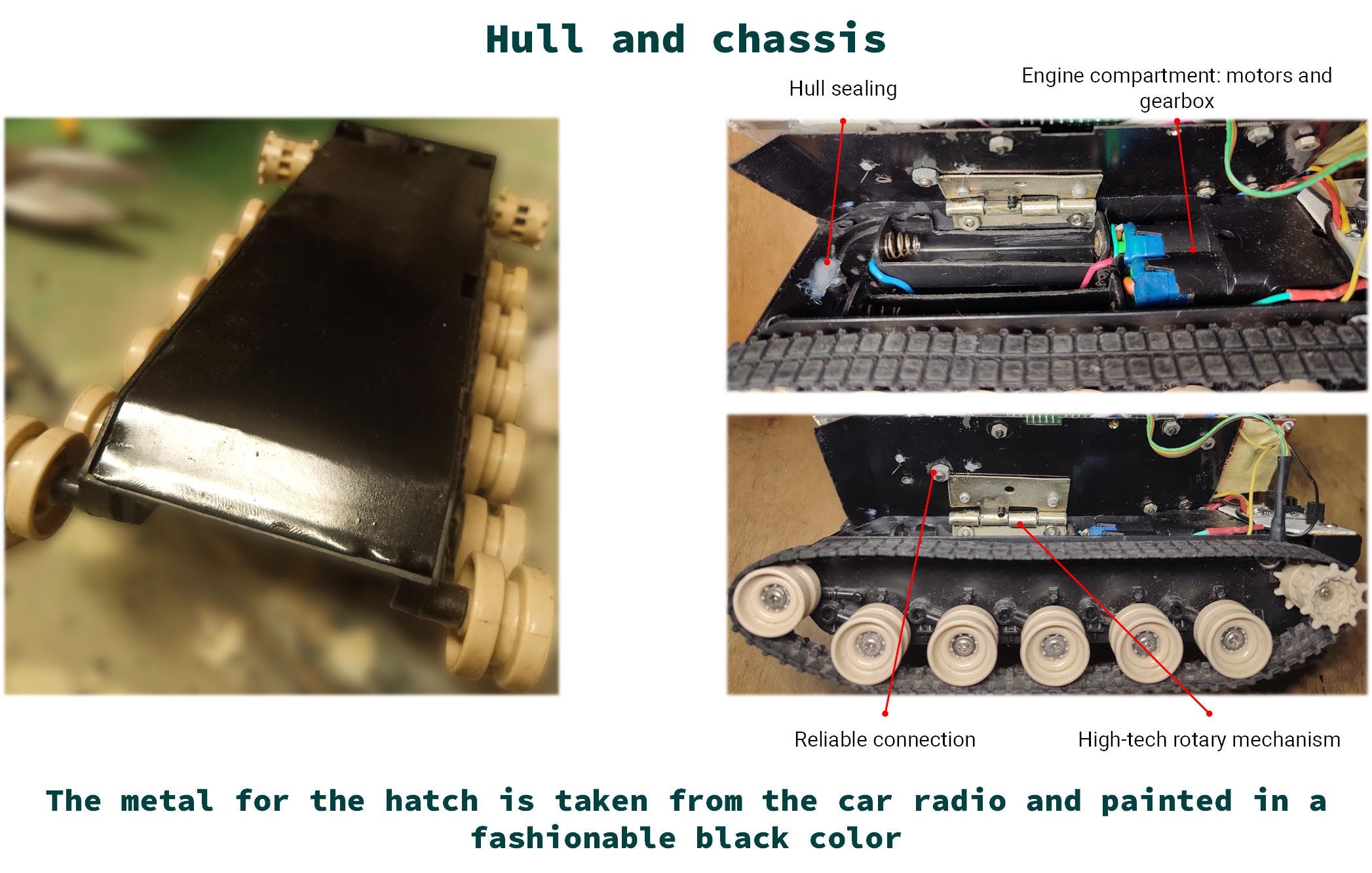
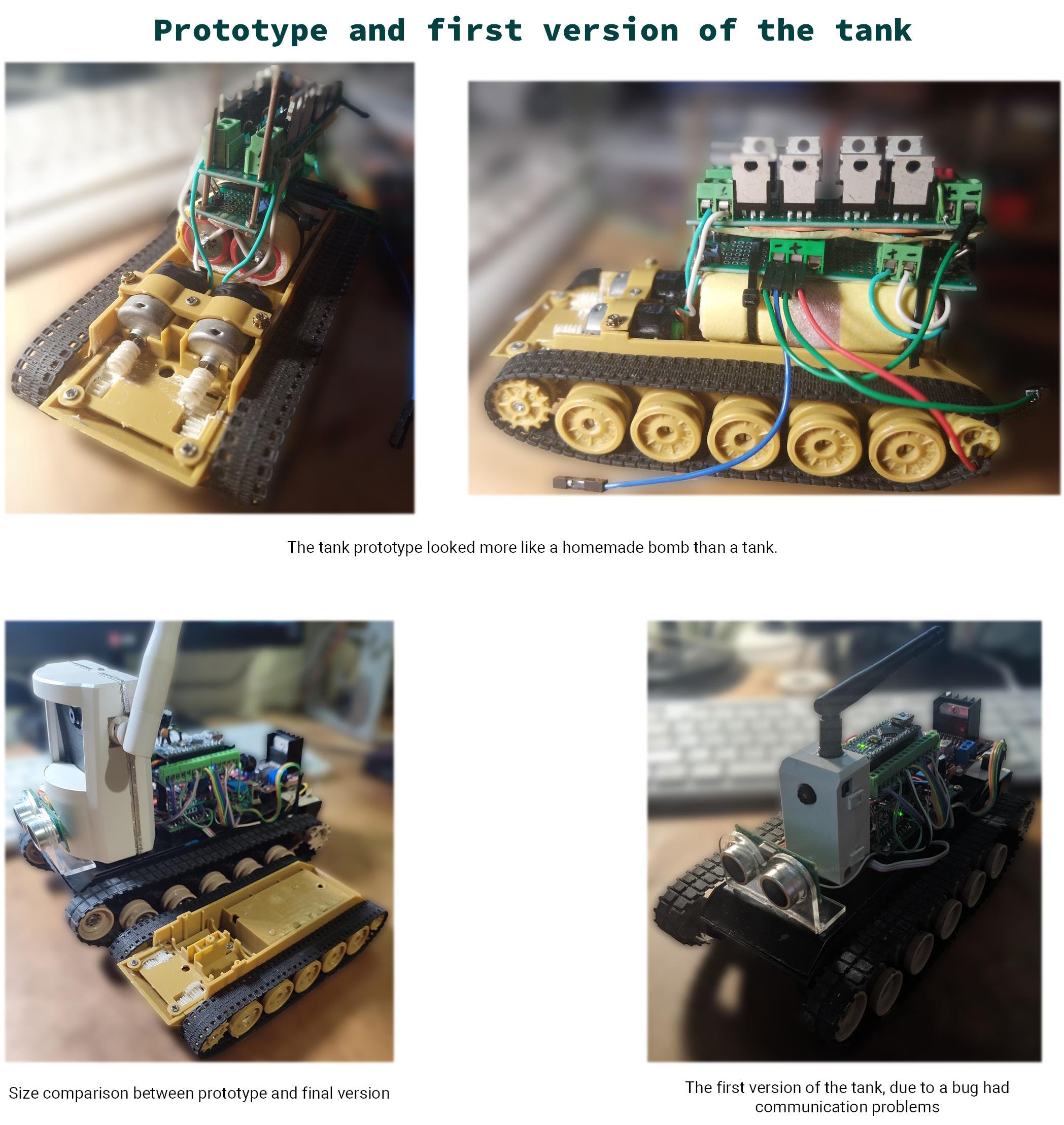
在我的坦克中,我使用了一個玩具坦克的船體,將里面所有多余的東西都磨碎了,以增加有用的體積。我用熱熔膠填充了所有不必要的孔。變速箱和電機已經安裝在玩具坦克上。
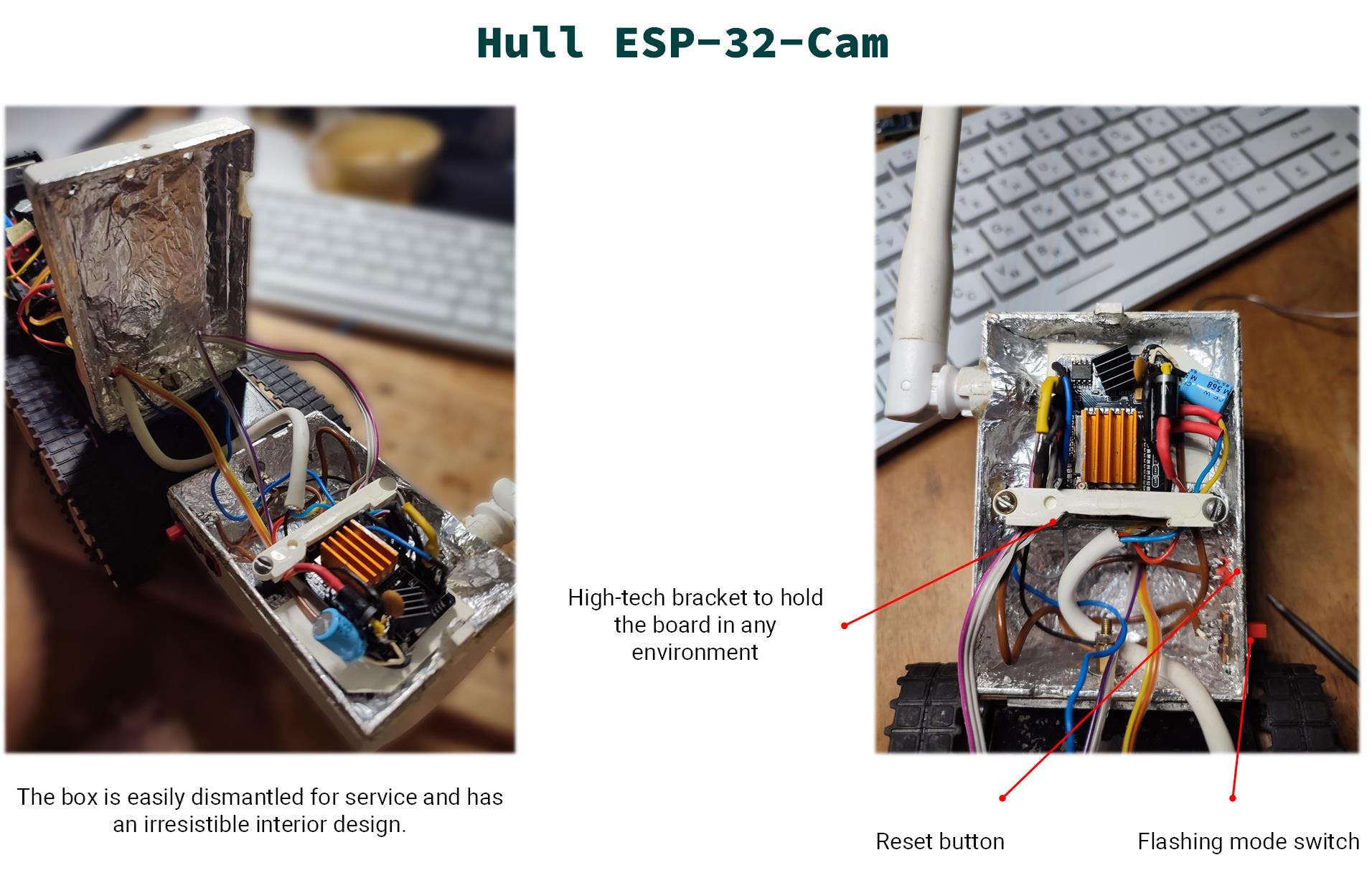
為了便于進入,我將船體的上部更換為帶鉸鏈的金屬艙口,其中包含坦克的主要部件。艙門下方是發動機艙——兩個電機+齒輪和一個帶有兩個電池的電池艙。艙口鉸鏈是家具鉸鏈(可能是一個殘酷的解決方案,但這正是我想要的)。
ESP-32-Cam(帶天線的白盒子)的外殼是紅外運動傳感器 (BV-201) 的倒置外殼。它足夠寬敞,分為兩部分,可以輕松更換其中的東西。
供電系統(車載網絡)
您設備的可靠性及其自主運行的持續時間取決于該系統。您必須確保整個設備在任何甚至最惡劣的條件下都能穩定供電。當一切都以最大程度打開時,電壓不應下降到會發生故障或重啟的水平。
有幾種方法可以實現電源穩定性:
- 創造條件,使得不可能使用超過設備所能提供的能量——例如,軟件保護或物理限制。
- 電源部分的獨立電源——電機和強大的消費者與智能部分——微控制器、傳感器分開。這樣,如果電源部分出現電壓驟降,例如,由于電機卡住,您將避免控制器 - 微控制器的電壓驟降。
- 提供某種針對電壓驟降的短期保護在大多數情況下會有所幫助并且易于實施。一個例子是微控制器的電力電容器。
主要思想是微控制器的電壓驟降非常糟糕,因為這意味著失去對整個機器的控制,以及所有后果......
坦克電池由一對2000mAh鋰電池組成。然后電池連接到一個DC-DC升壓轉換器MT3608,為車載電源網絡形成一個穩定的5.1V。需要 0.1V 的余量來減少電壓驟降對電線和二極管的影響。
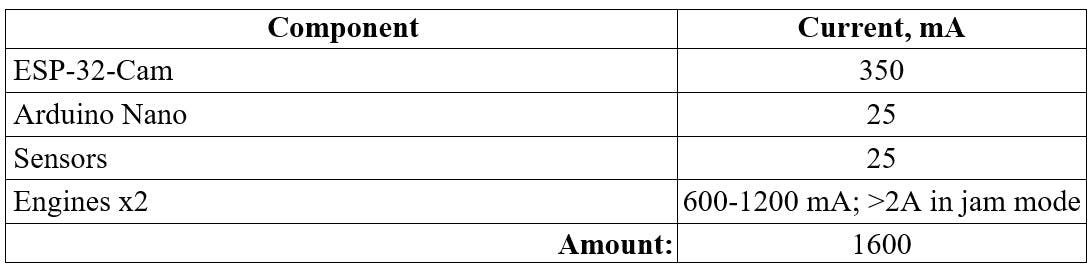
從上面的值可以看出,最大的消耗者是發動機,此外,根據坦克行駛的地形,發動機的功耗也不均勻。
坦克上所有連接的設備均由來自穩定器的 5V 供電。那些需要 3.3V 的傳感器由于功耗低,由 Arduino Nano 上的穩定器供電。帶有 ESP-32 的電路板有一個穩定器,可將輸入 5V 轉換為 ESP 所需的 3.3V。
在 Arduino 和 ESP 板的電源電壓輸入附近,有帶鎖定二極管的電解電容器。由于二極管,電源電壓降低,例如,對于 ESP,必須使用肖特基二極管(因為它的電壓降很小)。但是,這種小電容容量可確保在電機運行或電池電量耗盡時的短暫功率驟降期間為微控制器供電。沒有這個,他們會凍死或重啟。這一措施使坦克的電池壽命延長了約 40%。
電機上有 0.1 μF 陶瓷電容器以抑制電刷火花并消除電源中的干擾。阻塞電容器也靠近每個微控制器板上的電源輸入,以防止干擾。
微控制器
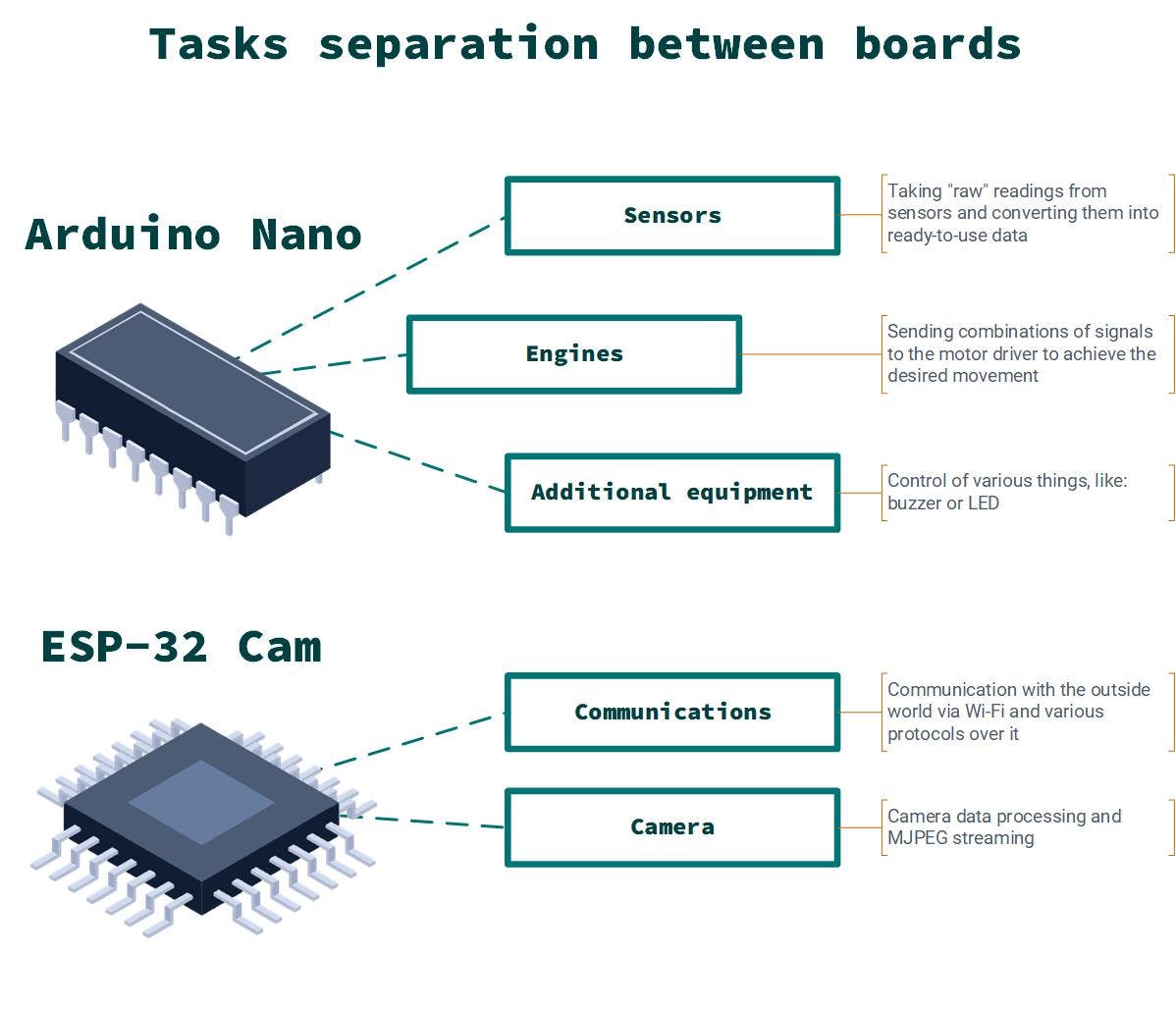
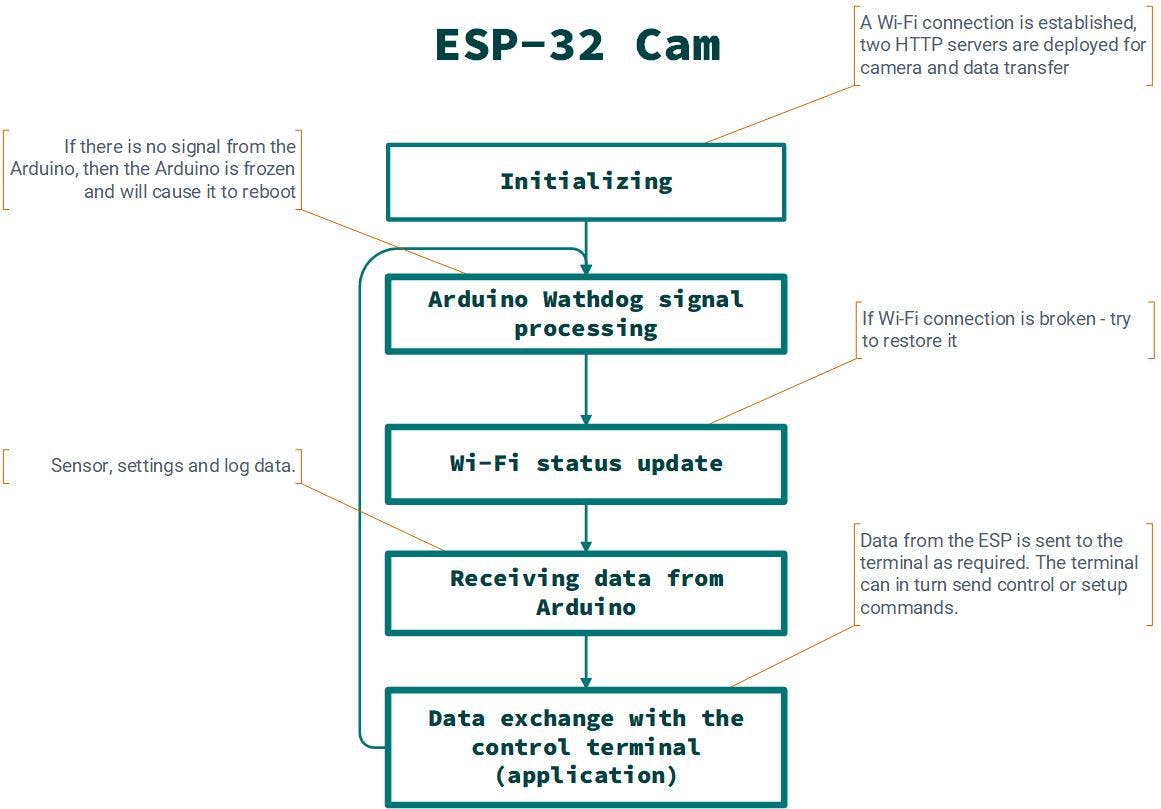
對于我的坦克,我決定將邏輯分為兩部分。一個微控制器將處理來自傳感器的數據、移動電機和做其他“簡單的事情”。第二個微控制器將處理攝像頭并通過 Wi-Fi 與外界通信。
- ESP-32 是帶攝像頭的電路板形式——我需要一些便宜的東西,它可以使用 Wi-Fi 并且能夠與攝像頭一起工作。這是我找到的最佳選擇。
- 作為 Arduino Nano 開發板的 ATmega328p 是尺寸完美的開發板,具有許多空閑引腳和所有必要的接口。傳感器讀取和電機控制等任務的經典可靠選擇。
為什么我選擇了兩個微控制器:
- 我想要 Wi-Fi 連接的最大響應速度,因此 ESP 上的任何額外任務都會給它帶來額外的負載,即使它是雙核的,這也可能導致額外的延遲,這是不允許的奢侈。
- 不幸的是,ESP-32-CAM 模塊外形中的 ESP-32 板的空閑引腳非常少,其中一些是為其他需要保留的。
- 某些 Arduino 庫在 ESP 上運行不佳。
- 我喜歡這種職責分離的想法。
ESP-32 和 GPIO0 的有趣錯誤
在刷入 ESP-32 之前,有必要將其置于啟動模式。這是通過將 GPIO0 引腳短接到 GND 來完成的。油箱上有一個開關(紅色開關),可以讓ESP進入固件模式或普通模式。但是我遇到了一個記錄不完整的錯誤/功能。在正常工作模式下,此引腳上會產生一些特殊的高頻信號,違反這些信號會導致整個 ESP 出現各種毛刺。雖然觸點有一個內部上拉電源,但它無助于減少通向開關(約 7 厘米)的電線中的干擾,因此偶爾會出現電路板凍結。通過斷開引腳上的電線,問題就消失了。我發現這是一個罕見的錯誤(可能是我的電路板有缺陷)。更換電路板對我有幫助。
軟件和固件
我使用了 Arduino 框架,因此您在 Arduino 和 ESP 上獲得了一個單一的生態系統,盡管 ESP 有自己的框架和出色的文檔。
本項目使用espressif32平臺3.2.1版本,因為高于該版本破壞了內存分配算法,會導致ESP重啟。這僅適用于我的情況,因為我使用多種協議,例如 HTTP、SSE、Websocket 和頻繁的數據傳輸。在其他情況下,一切正常。
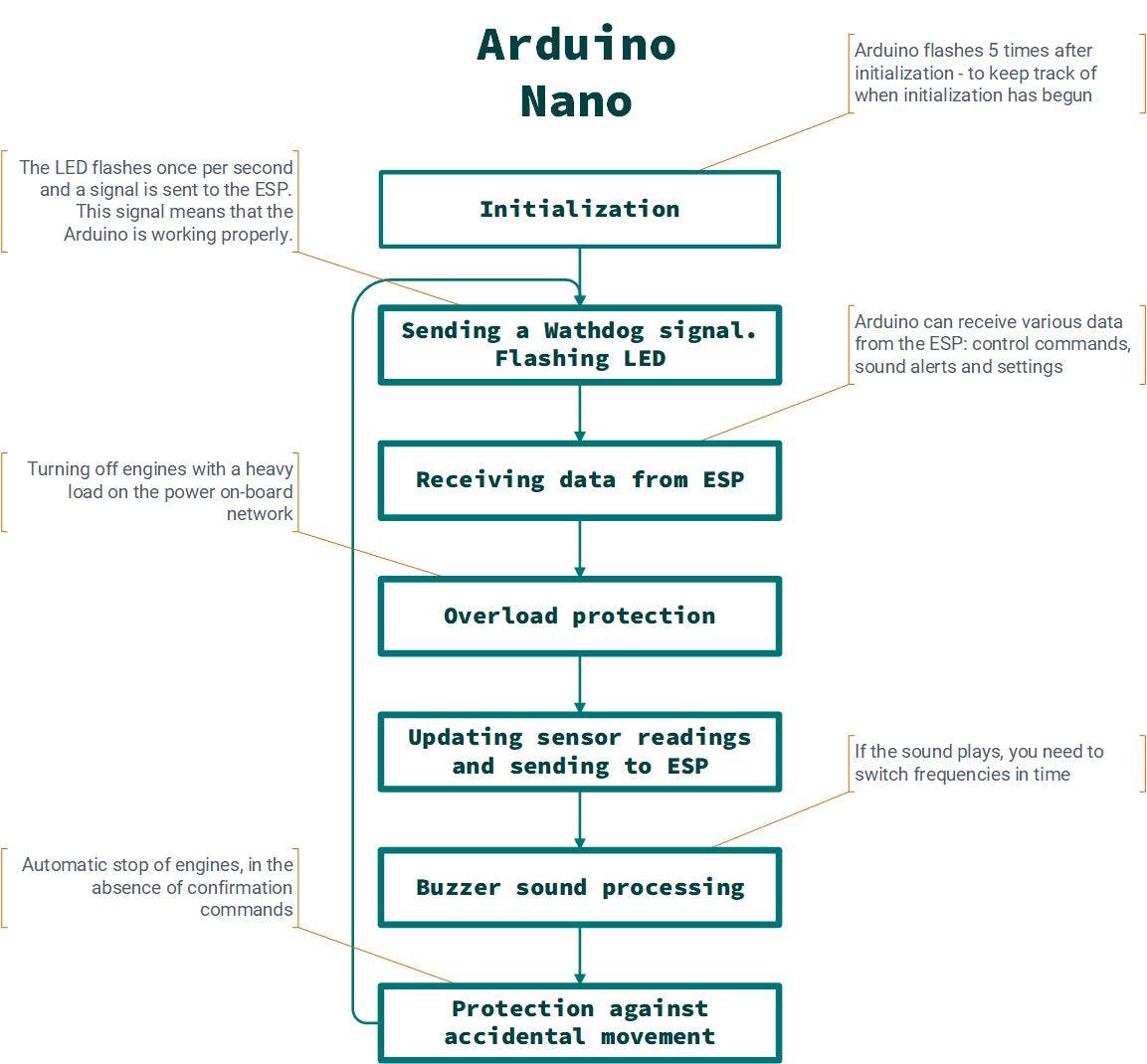
坦克操作算法。這些是一般意義上的工作周期。我的圖表不能稱為對實際發生的事情的準確描述,因為最好看代碼。我只展示主要方面。
錯誤保護。由于錯誤和崩潰是不可避免的,尤其是在調試期間,我不得不做一些優雅的 hack 并將其稱為“錯誤保護”。
有看門狗之類的東西。看門狗是一個硬件定時器,它一直倒計時,如果計數到零,它會重置微控制器。在正常操作中,微控制器應定期重置看門狗,使其時間恢復到原始狀態。如果微控制器突然開始思考并且沒有時間復位,看門狗將拉動復位開關 - 簡單有效。
Arduino 會很快耗盡 RAM。我決定放一個看門狗來跟蹤電路板,如果發生什么事就重新啟動它。不幸的是,Arduino Nano 有這樣一個本機引導加載程序實現,我的板將進入永久重啟(Arduino WDT 引導循環)。你可以通過刷新另一個引導加載程序(如optiboot)來解決這個問題,但這個解決方案太無聊了,所以我決定用 ESP-32 來組織看門狗。
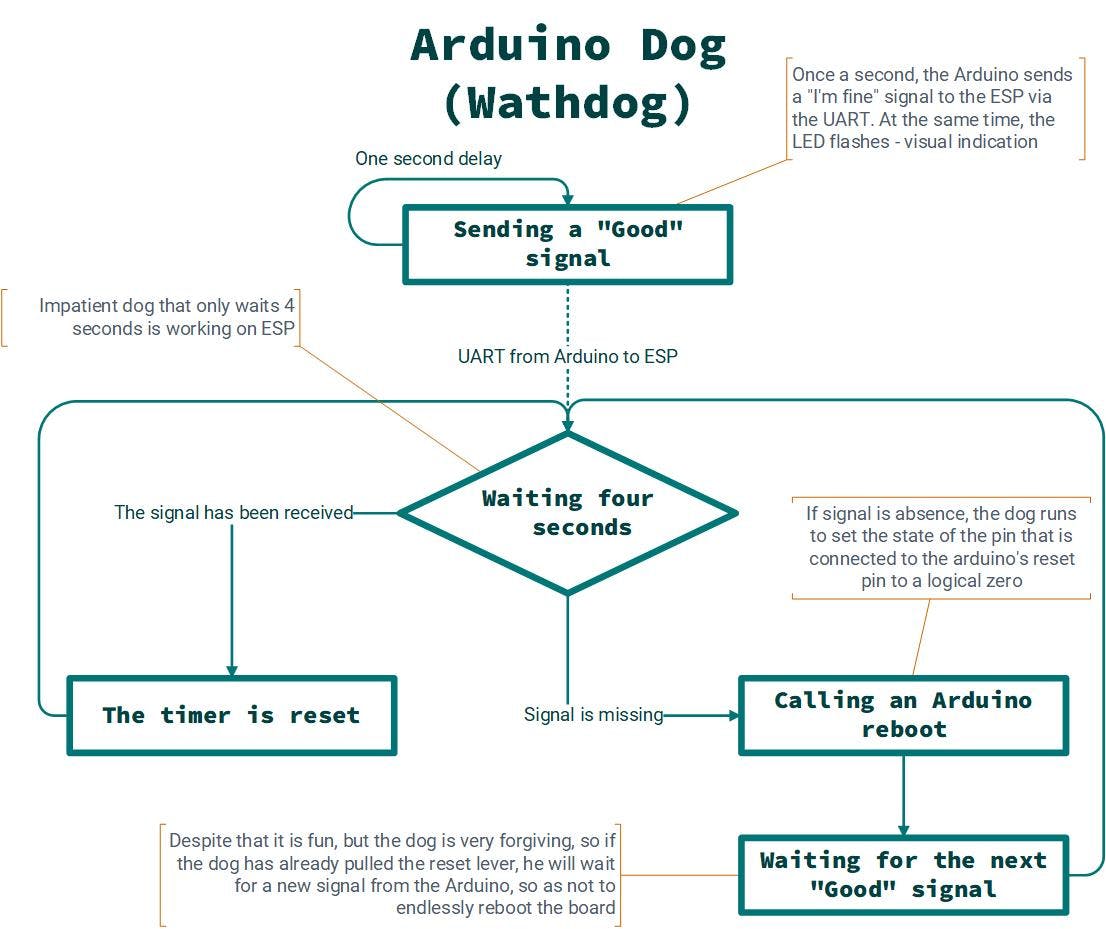
在 ESP 上一切都比在 Arduino 上無聊得多,有兩種防止錯誤的保護措施。第一個通過使用集成看門狗 4 秒來防止在密集數據傳輸期間發生 RAM 溢出。如果出現死機,電路板將重新啟動,并且重新啟動的速度甚至讓人感覺不到 Wi-Fi 連接中斷(不需要重新連接)。
第二個 - 掉電檢測器已關閉。這樣做是為了在 5V 電壓的條件下,可以工作更長時間。現在,萬一由于缺電而真正掉電,電路板將凍結,但這可以通過防止電機過載的軟件保護(更多內容見下文)和最重要的 - 延長電池壽命來補償,因為檢測器的閾值有點高估。
電機過載保護。盡管名稱如此,但這種軟件保護并不保護引擎,而是保護車載電源網絡免受電壓驟降到臨界水平的影響。由于發動機是油箱上最大的能量消耗者,我做了一個保護,當電壓低于一定水平時 - 停止發動機(從而減少電流消耗),這可以避免大多數重啟或掛起電源。
電機過載保護算法在Arduino上實現,電壓由其內部ADC測量。這是算法的樣子:
- 在某個時間間隔(5 毫秒)測量電池電壓。
- 如果電壓低于閾值,并且在上次測量中沒有這種情況,它只會記住這個事實。
- 如果電壓低于閾值,并且在上次測量中也低于閾值,則會觸發保護并停止電機。
我試圖通過電機的平穩加速來緩和瞬態電壓驟降的影響(在改變運動側的那一刻),但這沒有明顯的效果(可能在大型電機上它會給出更好的結果),而且由于電機加速時存在延遲,因此失去了動態控制。
聲音信號。聲音警報是一件很酷的事情,它們會讓我知道水箱是否出了什么問題,或者它是否準備好工作了。
我總共有四聲嗶嗶聲:
- “通知” - 最響亮的。這是為了嚇唬街上的人(所以他們不會不小心踩到坦克)。可以從控制應用程序手動調用此信號。
- “警告”——發生了一些事情,但并不嚴重,例如引擎因電壓過低而停止。
- “錯誤”——有什么東西壞了,如果不進行干預或重新啟動,坦克就無法再工作。
- “好”——意味著一切都很好。目前用作坦克已準備就緒的指示器。
所有信號都由一組四個部分組成。每個部分存儲聲音的頻率和持續時間,一個特殊的功能在信號發聲期間切換頻率。該報警系統易于實施且易于擴展。
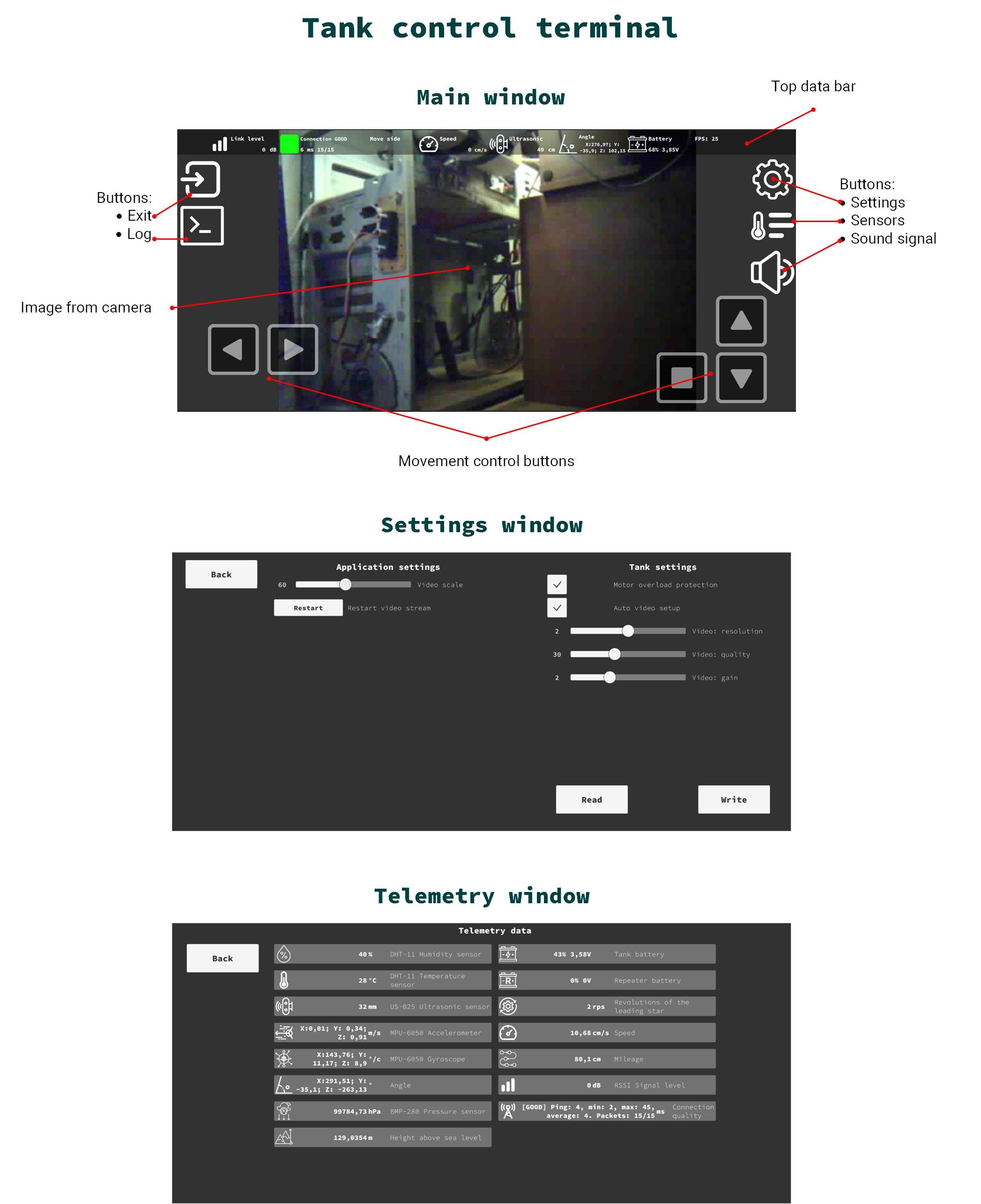
坦克控制終端(應用程序)
這是一個提供以下功能的應用程序:運動控制、查看來自傳感器的數據、進行診斷和調整水箱。該應用程序是使用游戲引擎 Unity 制作的。Unity 不是為此任務而設計的,因為它畢竟是游戲引擎。我選擇 Unity 只是為了好玩。
。
- Wi-Fi 允許通過智能手機進行控制。
- 我喜歡技術本身。
與罐體的連接方式有兩種:
- 外部中繼器天線 - 這種天線的質量優于智能手機中的天線。
-
如果您使用 Wi-Fi 標準:802.11n,將帶寬從 40 MHz 降低到 20 MHz 是有意義的。據我了解,這種情況很少見,這完全是因為我喜歡廉價組件。網上有貼個防靜電袋之類的解決辦法,但實際上,這些辦法都不是很有效。我花了好幾個小時想辦法解決這個問題,并將天線換成外置天線,我什至在 ESP 船體周圍包裹了箔紙,雖然它更多的是保護它免受街上隨機噪音的影響,而且它也很漂亮。
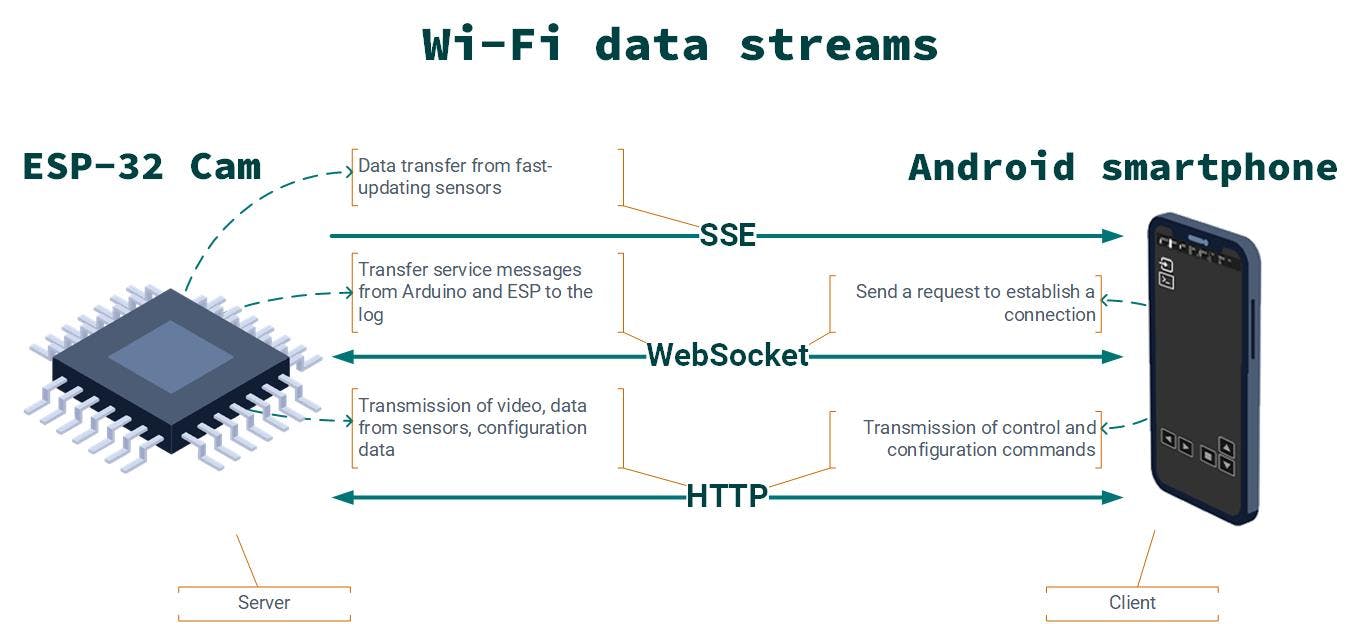
數據傳輸協議。儲罐和控制終端之間的數據交換通過三種協議進行:
- HTTP – 只有客戶端可以啟動通信會話,服務器不能首先向客戶端尋址。它傳輸來自傳感器、控制和配置命令的數據。
- WebSocket (WS) – 允許您從服務器向客戶端雙向發送數據,反之亦然。它用作建立通信模式并將數據從 ESP 和 Arduino 傳輸到日志的初始“ping”。
- Server-Sent Events (SSE) – 根據客戶端-服務器訂閱的原理工作,但僅以一種方式工作,即從服務器到客戶端。將來自傳感器的一些數據傳輸到終端,這些數據會快速更新。
 ?
?使用的主要協議是 HTTP。WebSocket 和 SSE 我選擇使用它們來收集經驗。所以,用例有點牽強,你可以很容易地沒有它們。此外,本機異步 Web 服務器非常快。
WS和SSE的選擇基于兩個因素:
- 它們允許您將數據從服務器直接發送到客戶端。使用 HTTP,客戶端必須輪詢服務器。
- 理論上,由于數據冗余和不必要的通信會話較少,它們比 HTTP 工作得更快。
ESP-32 上的數據更新率。ESP 對其可以處理的數據量有一定的限制,大約每秒 15 個數據包。如果超過此限制,數據將被丟棄,并在 UART 中顯示“錯誤:排隊的消息太多”條目。請注意,這里每秒的連接數比數據量的影響更大。
因為我想要更快的傳輸,所以我決定嘗試使用 WS 和 SSE 繞過它。我的流量幾乎總是同質的,所以一切都在相同的條件下進行了測試。這是我得到的結果:
- WebSocket——連接數限制與HTTP服務器類似。除了直接從服務器傳輸到客戶端外,沒有其他好處。
- SSE - 允許您將傳輸限制稍微增加每秒 3-5 個數據包。
- 這兩種協議都不如 HTTP 服務器穩定。例如,有時,ESP-32 可能會在流量過大時重啟或死機,作為提醒:“不要搞亂繞過限制”。如果你不過分,你可以使用它。
三種協議的響應速度是一樣的,傳輸同樣的數據不能說HTTP比WS或者SSE慢。這意味著最終實施比選擇任何這些協議進行控制或任何其他需要低延遲的協議更重要。
數據傳輸原理。數據以字符串形式傳輸。有的打包成JSON格式,有的按原樣傳輸。
ESP-32 托管一個異步 HTTP 服務器。它通過 HTTP GET 請求進行通信。終端通過請求發送控制命令。在參數中有一個數字,它對應于坦克的運動側。相機或 Arduino 設置以類似方式傳輸。終端定期輪詢來自傳感器的數據,從 ESP 接收最后接收到的 JSON 格式的傳感器讀數作為響應。
WebSocket - 向終端發送服務消息以記錄并確認 Arduino 設置已被接受。
SSE 用于一個目的:從 Arduino 接收到數據后,立即將更新后的傳感器數據快速發送到終端。
從傳感器傳輸數據。傳感器分為兩組:
- 慢速傳感器 - 以特定時間間隔更新并從 Arduino 傳輸到 ESP。控制終端(應用程序)定期請求此數據。更新頻率為兩秒一次。通過 HTTP GET 請求傳輸。
- 快速傳感器 - 以一定間隔更新(比慢速傳感器快)并由 Arduino 傳輸到 ESP,然后立即發送到控制終端。更新率為每秒 2.5 次。通過 SSE 傳輸。
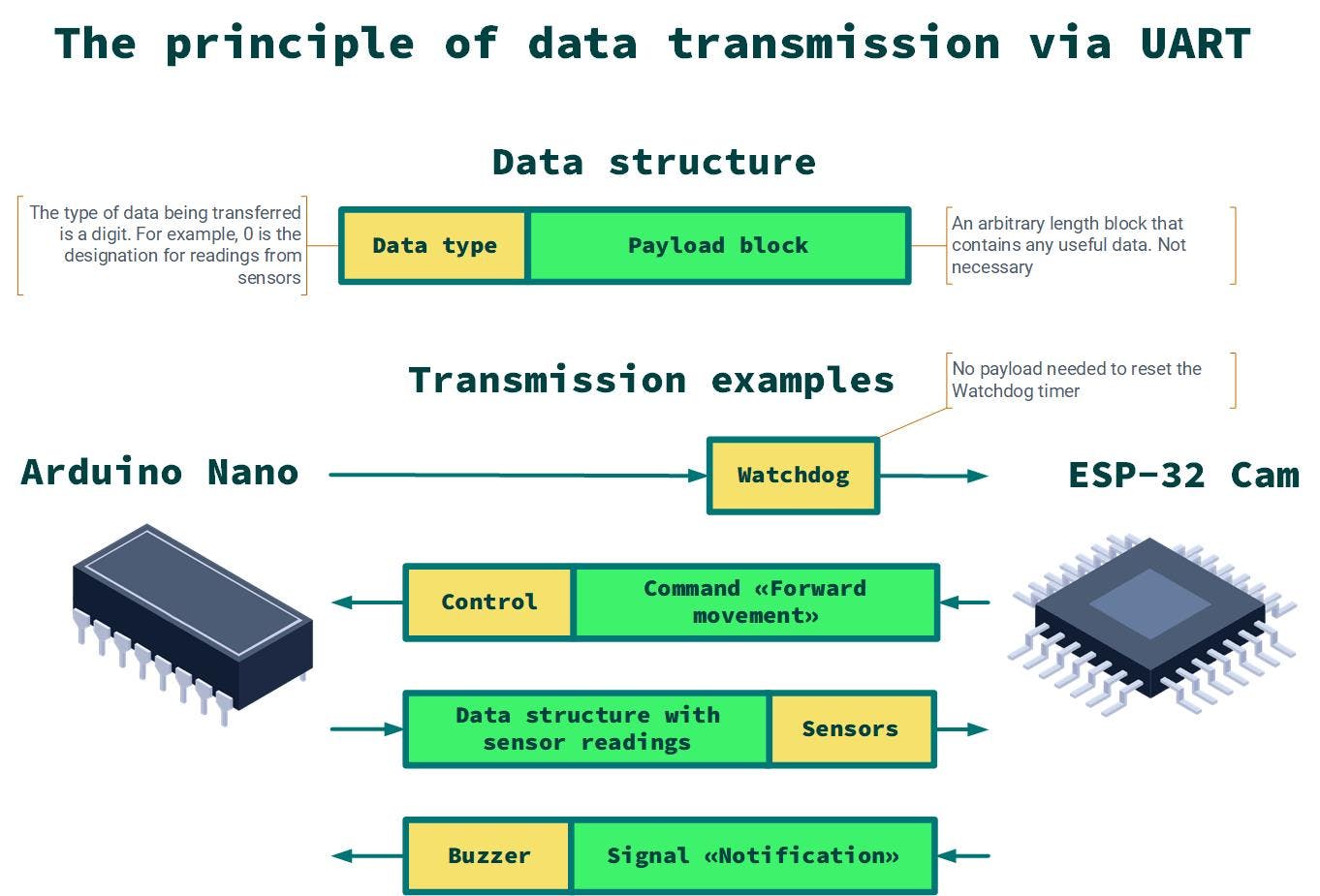
內部溝通。Arduino-ESP。Arduino開發板和ESP-32-Cam使用UART協議進行通信。起初,我自己制作了數據傳輸的解決方案,但是當要管理的數據太多時,我意識到使用現成的解決方案要好得多。
這個解決方案是很棒的庫SerialTrasfer,它承擔了數據傳輸的“臟”工作:組織正確的數據包傳輸、校驗和計數并允許您傳輸簡單的數據類型和結構,這正是我所需要的,因為我存儲數據來自結構中的傳感器。
ESP-32 有幾個板載硬件 UART,與 Arduino 不同,它可以很容易地重新配置為其他引腳。UART_0 保留用于調試和刷新固件,UART_1 用于 Arduino 通信。
數據傳輸的 UART 速度設置為 76800 波特/秒。在此速度下,由于 Arduino 微控制器的 16 MHz 時鐘頻率和 ESP 的 320 MHz 時鐘頻率,傳輸錯誤最少。該解決方案可以在很大程度上保證 ESP 和 Arduino 之間傳遞正確的數據,而無需檢查和復制它們。
由于 Arduino Nano 微控制器 (ATmega328) - 8 位和 ESP-32 - 32 位的不同架構,您需要使用內存對齊,以便數據(枚舉、結構)在兩個平臺上都能被正確接受。為此,我使用屬性“attribute((packed))”。
鑒于 ESP-32 (3.3V) 和 Arduino (5V) 邏輯電平的不同電壓,它們之間的 UART 通過電平轉換器連接。
UART數據傳輸原理:
- 數據成對傳輸:“數據類型”和“有用數據”,最后一個可以不存在,因為有時僅存在傳輸事實就足夠了,例如需要更新的信號看門狗定時器。
- 共有8種數據類型:“傳感器讀數”、“控制命令”、“蜂鳴器類型”、“看門狗”、“日志消息”、“快速傳感器讀數”、“Arduino設置”、“讀取Arduino設置”。
- 在發送方準備一條消息,開頭是數據類型,如果需要,后面是有用的數據。
- 接收方收到消息,根據消息類型,可能有:一些動作或解包數據。
 ?
?這個簡單的數據傳輸系統易于擴展,允許您傳輸不同類型的數據并引入了一點冗余,因為數據類型只是 Enum,即通常的數字。
您不僅可以使用 UART,例如 SPI,或 I2C,或其他數據傳輸協議。我之所以選擇 UART,是因為它有很好的文檔,易于使用,而且仍然需要它來進行調試。
傳感器
各種場合都有大量的傳感器,它們需要測量所有存在的和不存在的物理量。它們是您設備的“眼睛和耳朵”。有了它們,您的設備就可以感知現實。
水箱上有許多傳感器:
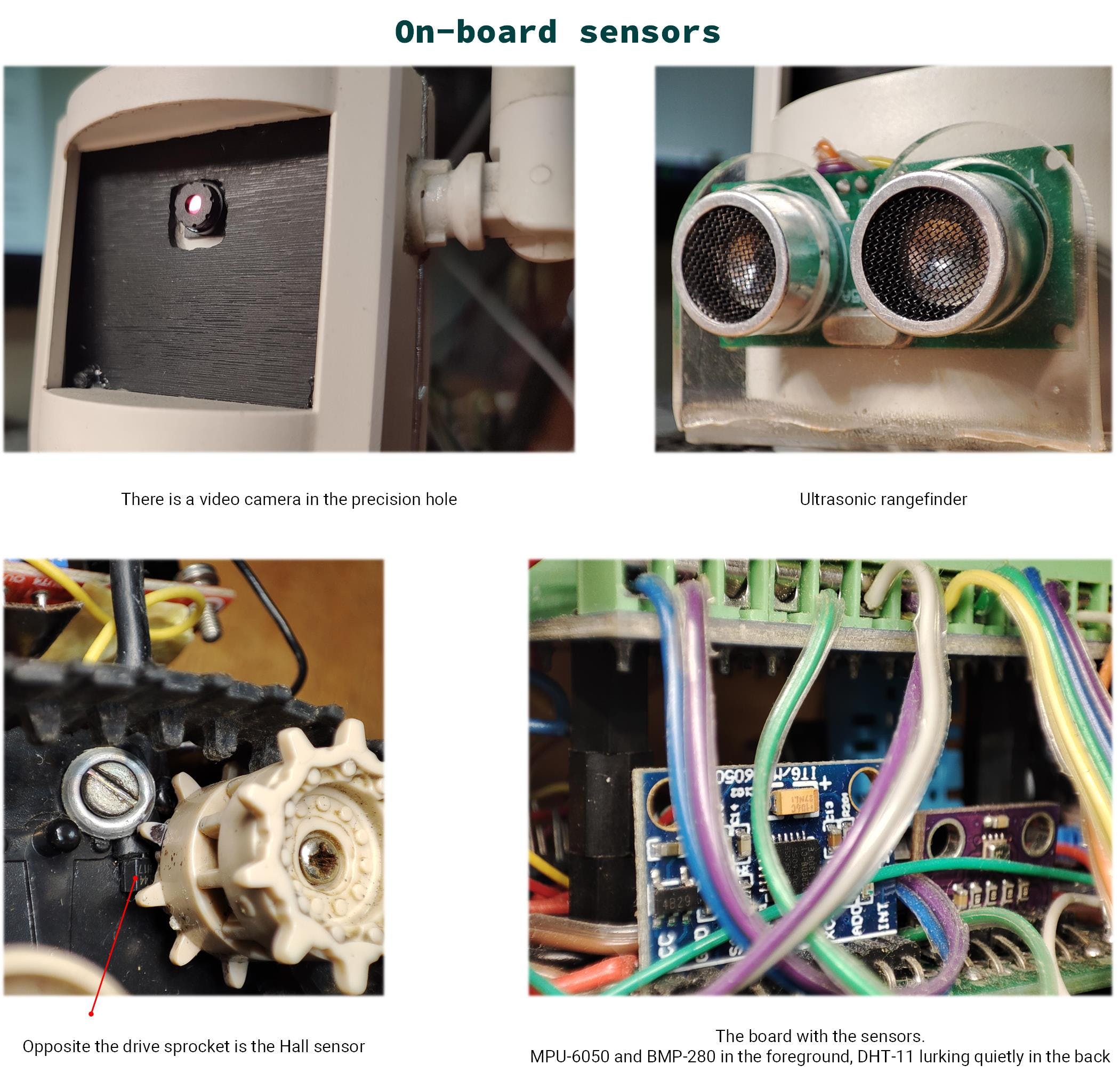
- DHT-11 模塊溫度計和濕度計。不是很準確,但便宜且易于使用。我認為在坦克(帶遙測)上應該有一個經典的傳感器 - 一個溫度計。
- 霍爾傳感器 A3144,作為轉速計。一個小的釹磁鐵安裝在左側軌道的驅動鏈輪上,一個霍爾傳感器放置在船體上靠近它的位置。傳感器讀取經過它的每個磁鐵,并據此計算驅動鏈輪的轉數。知道鏈輪的直徑,您就可以準確地知道油箱以什么速度通過了多遠的距離。這種即興創作的準確性讓你希望更好,但效果很酷。
- 氣壓計 BMP-280。允許您獲得大氣壓力并基于該氣壓計算海拔高度。傳感器有多種適用于所有場合的工作模式,但設置起來有點復雜。
- MPU-6050加速度計和陀螺儀模塊。一種用于測量空間方向的良好、快速的傳感器。使用復雜的數學來工作,但這可以通過許多可用的庫來彌補。
- US-025 超聲波測距儀(HC-SR04 的模擬)。用于顯示距坦克前方最近障礙物的距離。
I2C 總線的有趣錯誤
一些傳感器(MPU-6050、BMP-280)通過 I2C 連接。有時由于這條總線,Arduino Nano 微控制器可能會凍結。我用示波器觀察了公共汽車上發生的事情,而不是近似平坦的矩形形狀,我看到了可怕的扭曲信號前端,更像是三角形,甚至是隨機噪聲。我檢查了幾塊木板,沒有水箱,但結果是一樣的。我一直不知道是什么原因造成的。也許是因為廉價的 Arduino 零件或其他原因。通過 1.3 kOhm 將總線強力上拉到電源有幫助。
 ?
?。
-
。
?
在我的例子中,安裝了最便宜的相機版本。對于那些想用第一人稱視角 (FPV) 做類似事情的人,我建議購買鏡頭視角為 120° 的相機版本,因為通常的 66° 會產生非常可悲的結果——它只是缺乏視野。
執行器
這就是讓您的設備活躍起來的原因。例如,在我的坦克上,它是由兩個電機驅動的。它也可能是某種激光和伺服系統來指向??它。
執行器通常會消耗很大一部分機載功率。由于微控制器本身只能通過小電流,因此有必要通過特殊的“適配器”——驅動程序來控制這些設備。
驅動器是連接微控制器、執行器和電源的電路板。這個想法是微控制器只發送諸如“做這個或那個”之類的控制信號,而驅動器本身會弄清楚如何正確地啟動執行器。您也可以從微控制器生成信號,但隨后必須制作所有電路并實施控制算法。使用現成的專用設備(驅動程序)效率更高、速度更快。
對于坦克,我使用了 L298N 驅動器。可以使用更新和更高效的驅動程序。但我喜歡使用這樣的舊東西,它有一個殘酷的外觀和一個大的,最重要的是在工作后溫暖的散熱器 - 它賦予了坦克的精神并且完全適合它的“從桌子上的東西建造”設計。
一共有9條控制命令:
- “動”:前進,后退。
- “轉”:左、右。
- “轉身”:前左右、前右、后左、后右。
- “停止。”
考慮到坦克的電機略有不同,它們具有不同的直線運動最大 PWM 信號(電機的最大速度)。
電機控制原理:
- “停止”命令 - 向驅動器發送信號以停止電機。
- “移動”命令 - 驅動器向前或向后旋轉兩個電機。
- “轉彎”命令——轉彎一側的發動機向后旋轉,第二個發動機向前旋轉。這樣就實現了原地快速轉彎。
- “Moving with a turn”命令 - 與轉彎相對的軌道電機以 100% 工作,而轉彎側的電機降低轉數,例如 70%。這導致平穩地轉向制動履帶的一側。
可以使用更激進的制動策略,例如倒車或鎖定電機,但考慮到我的坦克質量小且幾乎完全沒有慣性,這太過分了。此外,變速箱會阻止自發運動,而且這種制動器會在短時間內消耗大量能量。
要轉彎,您可以關閉(停止)轉彎一側的履帶發動機。通過這種方式,您可以在履帶制動器周圍的位置實現良好的半徑轉彎。
如您所見,控制執行器并不復雜。您只需根據電流消耗和您要控制的設備類型選擇適合您任務的驅動程序。
照片展示
??? ?1 / 7 ?坦克 - 前視圖?
?1 / 7 ?坦克 - 前視圖?獎金照片
 ?
?結論
我在 GitHub 上的存儲庫中發布了 Arduino 固件、ESP-32 和 Unity 應用程序的所有源代碼,如果您發現“有趣的解決方案”,請不要感到驚訝。我的目標是向您展示原理本身,最好的方法是自己弄清楚并根據您獲得的知識制作自己的東西。
寫這篇文章幫助我列出了我在創建坦克時的所有經驗。并記住在此過程中出現的所有錯誤和缺陷的解決方案,您可以避免這些錯誤和缺陷,并專注于尋找自己獨特的錯誤并與社區分享。我真的希望我能激勵別人創造出這樣一件很酷的東西。
- Wi-Fi 6E:Wi-Fi的下一個前沿
- Wi-Fi相機陷阱開源
- 通過BLE實現Wi-Fi配置 10次下載
- 華為開啟企業無線Wi-Fi 6時代 1次下載
- 基于ARM11的嵌入式Wi-Fi實驗研究
- WINC1500 Wi-Fi模塊上的功率測量 13次下載
- 大規模普及在即 怎知道自己是否適合Wi-Fi 6?
- Wi-FiG演示板創建Wi-Fi網絡和從客戶端設備Web瀏覽器控制演示板功能
- Wi-Fi以及WiFi模塊的基本認識 34次下載
- WI-FI技術原理 4次下載
- WI-FI技術原理以及應用 4次下載
- Wi-Fi技術及應用 2次下載
- SimpleLink Wi-Fi CC3000 251次下載
- 什么是Wi-Fi
- Wi-Fi技術及產品解決方案
- Wi-Fi 7與Wi-Fi 6的相關知識科普 523次閱讀
- Wi-Fi6的技術特點 Wi-Fi6到底有多快?Wi-Fi 7與Wi-Fi 6有何不同? 1485次閱讀
- Wi-Fi發展歷程,你了解多少? 1537次閱讀
- 了解Wi-Fi 6 / 6E的未來 1464次閱讀
- Wi-Fi標準簡介:Wi-Fi 6和Wi-Fi 7 3847次閱讀
- Wi-Fi HaLow與傳統Wi-Fi有何不同? 3840次閱讀
- Wi-Fi 6+技術提升在哪里? 實測Wi-Fi 6+技術傳輸速度 4254次閱讀
- 與Wi-Fi 6相比,Wi-Fi 6E新增了什么作用? 2199次閱讀
- Wi-Fi 6,未來網絡的新起點 759次閱讀
- Wi-Fi不等于WLAN 2610次閱讀
- 什么是Wi-Fi6你期待Wi-Fi6嗎Wi-Fi 6的說明 9768次閱讀
- 同頻架構是如何解決Wi-Fi干擾難題的? 1981次閱讀
- Wi-Fi HaLow技術特點和應用分析 4142次閱讀
- Wi-Fi對人體真的無害嗎? 1337次閱讀
- 利用Wi-Fi路由器為物聯網裝置進行無線充電 1327次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 2使用TL431設計電源
- 0.67 MB | 2次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統
- 0.85 MB | 1次下載 | 1 積分
- 5LabVIEW環形控件
- 0.01 MB | 1次下載 | 1 積分
- 6PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 751單片機核心板原理圖
- 0.12 MB | 1次下載 | 5 積分
- 8BP2879DB支持調光調滅的非隔離低 PF LED 驅動器
- 1.44 MB | 1次下載 | 免費
本月
- 1開關電源設計原理手冊
- 1.83 MB | 54次下載 | 免費
- 2FS5080E 5V升壓充電兩串鋰電池充電管理IC中文手冊
- 8.45 MB | 23次下載 | 免費
- 3DMT0660數字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 12次下載 | 免費
- 5ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 6TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 7STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 8基于MSP430FR6043的超聲波氣體流量計快速入門指南
- 2.26MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監
工商網監
評論