 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
隨著大流行的持續(xù),硬件不僅難以采購,而且難以安全地協(xié)同工作。在智能微型車輛的情況下,可用單元的數(shù)量本質(zhì)上是有限的,我們部署它們的“環(huán)境”也是如此,例如賽道或障礙賽。我們?nèi)绾谓鉀Q硬件資源稀缺問題?我們將資源數(shù)字化!
> 本文最初發(fā)布于platis.solutions
SMCE是Smartcar 平臺的數(shù)字雙胞胎,以及一個酷炫且可定制的3D 世界,供您的漫游車漫游。核心概念是您編寫可在兩者上運(yùn)行的 Arduino 代碼真實(shí)的硬件和虛擬環(huán)境。通過這種方式,可以減輕或大大減少對汽車的專有和頻繁訪問的需求。理想情況下,模擬器允許限制與物理汽車的不可避免的接觸,以至于開發(fā)團(tuán)隊(duì)可以在模擬器上開發(fā)他們的功能,并且只訪問真實(shí)的硬件來驗(yàn)證它們。使用網(wǎng)絡(luò)物理系統(tǒng)的虛擬表示不僅在大流行期間很有價值。我們這些使用嵌入式系統(tǒng)的人可能會痛苦地認(rèn)識到由于缺乏硬件可用性而被阻止的不利影響。在這篇文章中,我將向您展示如何開始使用SMCE以及它的許多功能。如果你想要一些關(guān)于什么的靈感您可以使用該軟件查看我們的學(xué)生如何利用SMCE 來模擬 Arduino 車輛。

關(guān)于 SMCE
在深入了解模擬器之前,讓我們澄清一下 SMCE 不是什么:一個 3D 環(huán)境,用于您的超級自定義愛好項(xiàng)目,它使用各種奇異的傳感器和第三方庫。開箱即用的模擬器可支持Smartcar 庫的用戶并適應(yīng)他們的典型用例和傳感器設(shè)置。模擬器不僅適用于特定的庫,但是,如果您使用它,您的生活會輕松得多。我并不是因?yàn)槟M器而這么說。它帶有很多例子,它用途廣泛,總體上是一個非常容易使用的庫,您應(yīng)該嘗試一下!此外,我應(yīng)該注意,模擬器不是由我制作或維護(hù)的,所以請不要聯(lián)系我尋求支持。它是由我的兩個非常有才華的前學(xué)生Ryan Janson和Ruthger Dijt 開發(fā)的。您可以通過在相關(guān) GitHub 存儲庫之一上創(chuàng)建問題或開始討論來聯(lián)系他們。
SMCE 由兩部分組成:“前端”(smce-gd)和“后端”(libSMCE)。libSMCE是負(fù)責(zé)在您的計算機(jī)上編譯和運(yùn)行 Arduino 草圖的庫。
這個跨平臺的 C++ 庫為其消費(fèi)者提供了在托管環(huán)境中編譯和執(zhí)行 Arduino 草圖的能力,并綁定到其虛擬 I/O 端口以允許主機(jī)應(yīng)用程序與其子草圖進(jìn)行交互。
這個跨平臺的 C++ 庫為其消費(fèi)者提供了在托管環(huán)境中編譯和執(zhí)行 Arduino 草圖的能力,并綁定到其虛擬 I/O 端口以允許主機(jī)應(yīng)用程序與其子草圖進(jìn)行交互。
smce-gd取決于在libSMCE多彩的虛擬 3D 世界中可視化草圖執(zhí)行以及與周圍環(huán)境的交互。除非您打算做一些“聰明”的事情,擴(kuò)展或?yàn)轫?xiàng)目做出貢獻(xiàn)等,否則smce-gd您應(yīng)該主要關(guān)心的軟件。對于本教程,我將使用1.3.1版本,smce-gd在 Ubuntu 20.04 上運(yùn)行。
開始使用
為了在我的 Ubuntu 筆記本電腦上安裝 SMCE,我按照Wiki上的這些說明進(jìn)行操作。SMCE 的一個非常酷的地方是它可以在您的計算機(jī)上運(yùn)行。SMCE 也可以安裝在Windows或MacOS 上。如果 SMCE 安裝正確,您將看到以下屏幕:smce-gd
選擇Start Fresh選項(xiàng),然后在下一個屏幕中單擊+標(biāo)志。
然后是時候選擇在 Arduino 上運(yùn)行的代碼了。我建議從Smartcar 庫示例中的manualControl.ino草圖開始。獲取示例的一種簡單方法是Smartcar shield通過 Arduino IDE 的庫管理器下載庫,然后在您的光盤上找到它。讓我們看一下草圖:
#include
const int fSpeed = 70; // 70% of the full speed forward
const int bSpeed = -70; // 70% of the full speed backward
const int lDegrees = -75; // degrees to turn left
const int rDegrees = 75; // degrees to turn right
ArduinoRuntime arduinoRuntime;
BrushedMotor leftMotor(arduinoRuntime, smartcarlib::pins::v2::leftMotorPins);
BrushedMotor rightMotor(arduinoRuntime, smartcarlib::pins::v2::rightMotorPins);
DifferentialControl control(leftMotor, rightMotor);
SimpleCar car(control);
void setup()
{
Serial.begin(9600);
}
void loop()
{
handleInput();
}
void handleInput()
{ // handle serial input if there is any
if (Serial.available())
{
char input = Serial.read(); // read everything that has been received so far and log down
// the last entry
switch (input)
{
case 'l': // rotate counter-clockwise going forward
car.setSpeed(fSpeed);
car.setAngle(lDegrees);
break;
case 'r': // turn clock-wise
car.setSpeed(fSpeed);
car.setAngle(rDegrees);
break;
case 'f': // go ahead
car.setSpeed(fSpeed);
car.setAngle(0);
break;
case 'b': // go back
car.setSpeed(bSpeed);
car.setAngle(0);
break;
default: // if you receive something that you don't know, just stop
car.setSpeed(0);
car.setAngle(0);
}
}
}
上述示例指示流動站(即SimpleCar實(shí)例)遵循從串行端口發(fā)送的簡單命令。具體來說,當(dāng)f發(fā)送時,汽車將以預(yù)定義的速度前進(jìn),當(dāng)b發(fā)送時,它將向后行駛,r它會向右和l向左轉(zhuǎn)彎。任何其他角色都會停下車。選擇草圖后,單擊“編譯”選項(xiàng)。
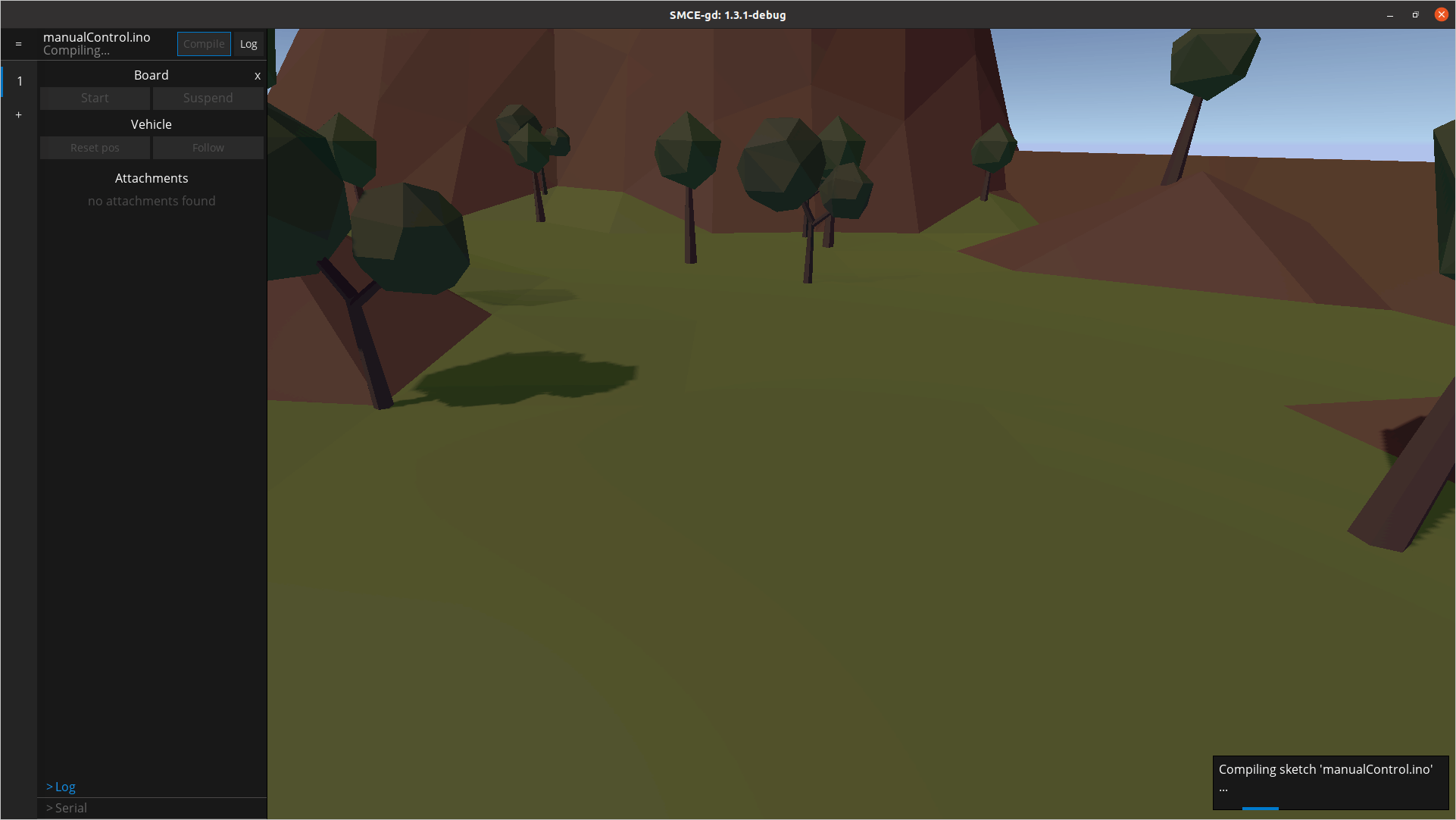
編譯成功后,點(diǎn)擊開始按鈕。您會看到汽車在虛擬世界中彈出。酷吧?讓我們開車吧!單擊屏幕左下方的“串行”選項(xiàng),鍵入并按鍵盤上的“Enter”。汽車將開始行駛。按下“跟隨”選項(xiàng),使相機(jī)隨著汽車一起移動,并使用我們上面描述的簡單命令進(jìn)行操作。完成后,您可以單擊停止。專業(yè)提示:您可能希望在函數(shù)結(jié)束時放置一個微小的延遲(例如),以避免占用您的 CPU 資源,因?yàn)?a href='http://www.1cnz.cn/tags/仿真器/' target='_blank' class='arckwlink_none'>仿真器將在您的草圖中快速循環(huán)。floop()delay(1)
使用傳感器
現(xiàn)在您已經(jīng)了解了環(huán)境物理原理以及如何通過串行端口向汽車發(fā)送命令,讓我們使用一些傳感器讓汽車自動移動。默認(rèn)情況下,汽車預(yù)裝了一堆方便的傳感器。默認(rèn)配置包括車輛前部的超聲波傳感器 ( SR04) ,連接到引腳 6 和 7。如果距離小于 70 厘米的障礙物,讓我們使用傳感器停止汽車。
#include
ArduinoRuntime arduinoRuntime;
BrushedMotor leftMotor{arduinoRuntime, smartcarlib::pins::v2::leftMotorPins};
BrushedMotor rightMotor{arduinoRuntime, smartcarlib::pins::v2::rightMotorPins};
DifferentialControl control{leftMotor, rightMotor};
SimpleCar car(control);
const int triggerPin = 6; // D6
const int echoPin = 7; // D7
const unsigned int maxDistance = 100;
SR04 front{arduinoRuntime, triggerPin, echoPin, maxDistance};
void setup()
{
// Move the car with 50% of its full speed
car.setSpeed(50);
}
void loop()
{
const auto distance = front.getDistance();
// When distance is `0` it means there's no obstacle detected
if (distance > 0 && distance < 70) {
car.setSpeed(0);
}
#ifdef __SMCE__
// Avoid over-using the CPU if we are running in the emulator
delay(1);
#endif
}
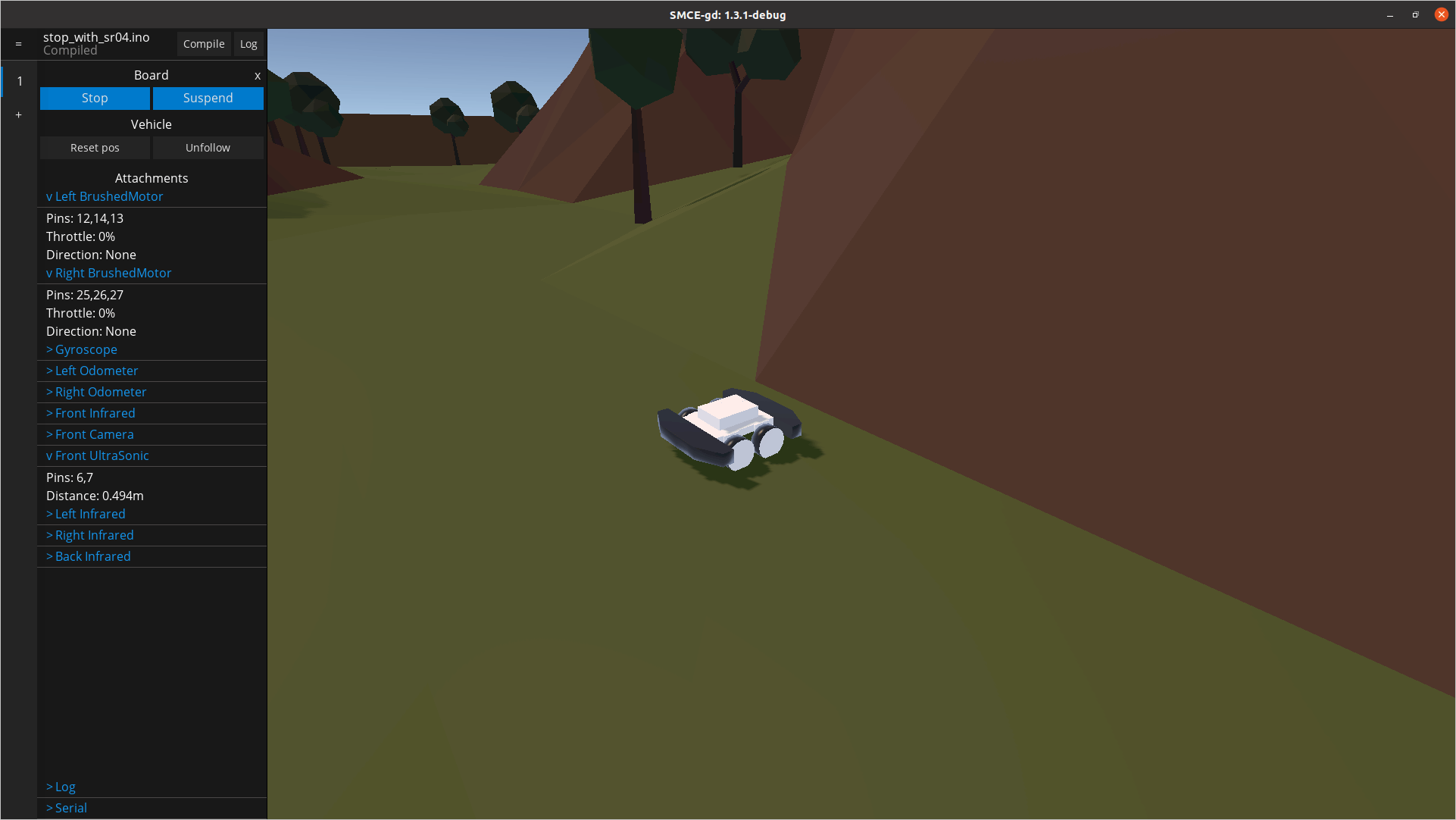
加載草圖并在模擬器中運(yùn)行它。它會一直直行,直到遇到障礙物。您可以通過單擊屏幕左側(cè)的傳感器讀數(shù)來實(shí)時監(jiān)控它們。在下面的屏幕截圖中,我們可以看到,一旦遇到墻壁,電機(jī)就沒有油門,并且檢測到的距離在預(yù)期范圍內(nèi)。專業(yè)提示:如果按F3 ,您將獲得傳感器指向的位置及其范圍的指示。這對于調(diào)試傳感器輸入特別有價值。
作為額外的真實(shí)感,傳感器讀數(shù)故意不完全準(zhǔn)確并且包含噪聲。默認(rèn)設(shè)置中當(dāng)前可用的傳感器有:
- 車輛前部的一個SR04超聲波傳感器,距離相對較遠(yuǎn),但其測量速度較慢且噪聲較大。
- 四個 SHARP 紅外傳感器(例如GP2Y0A21 ),位于汽車側(cè)面。它們的射程更短,但更準(zhǔn)確、更快速。
- 兩個方向里程表,每側(cè)一個,用于測量汽車行駛了多少。
- 一個GY50陀螺儀,可以告訴您汽車的方向,或者更確切地說,以度數(shù) [0, 360) 為單位的角位移。
- OV767X攝像頭,可用于流式傳輸汽車所看到的內(nèi)容。
連接性
通過串行端口發(fā)送命令并根據(jù)傳感器輸入使汽車自動行駛很有趣,但不可否認(rèn)的是,您可以完成的任務(wù)是有限的。您經(jīng)常需要您的車輛與“外部世界”進(jìn)行通信,無論它可能是不同設(shè)備上的應(yīng)用程序還是服務(wù)器。物理Smartcar平臺圍繞 ESP32 微控制器構(gòu)建,因此它可以通過 WiFi 或藍(lán)牙輕松連接到其他設(shè)備。SMCE 允許其用戶通過WiFi 和 MQTT模擬連接。雖然 WiFi 庫的模擬還沒有完全實(shí)現(xiàn),因?yàn)槿杂泄ぷ饕觯珣?yīng)該不會超過一些#ifdef __SMCE__編寫一個可在真實(shí)硬件和仿真器上無縫運(yùn)行的 Arduino 草圖。讓我們看看如何編寫一個簡單的草圖,通過 MQTT 消息控制汽車并廣播遙測數(shù)據(jù),即前超聲波傳感器的距離測量值。注意:雖然下面的草圖在 SMCE 上運(yùn)行良好,但它需要一些添加/更改才能在實(shí)際的 ESP32 上運(yùn)行,主要是關(guān)于 WiFi 連接。
#include <MQTT.h>
#include <WiFi.h>
#include <Smartcar.h>
#ifndef __SMCE__
WiFiClient net;
#endif
MQTTClient mqtt;
ArduinoRuntime arduinoRuntime;
BrushedMotor leftMotor(arduinoRuntime, smartcarlib::pins::v2::leftMotorPins);
BrushedMotor rightMotor(arduinoRuntime, smartcarlib::pins::v2::rightMotorPins);
DifferentialControl control(leftMotor, rightMotor);
SimpleCar car(control);
const auto oneSecond = 1000UL;
const auto triggerPin = 6;
const auto echoPin = 7;
const auto maxDistance = 400;
SR04 front(arduinoRuntime, triggerPin, echoPin, maxDistance);
void setup() {
Serial.begin(9600);
#ifdef __SMCE__
// ================= 1
// mqtt.begin("aerostun.dev", 1883, WiFi);
mqtt.begin(WiFi); // Will connect to localhost
#else
mqtt.begin(net);
#endif
// ================= 2
if (mqtt.connect("arduino", "public", "public")) {
mqtt.subscribe("/smartcar/control/#", 1);
mqtt.onMessage([](String topic, String message) {
if (topic == "/smartcar/control/throttle") {
car.setSpeed(message.toInt());
} else if (topic == "/smartcar/control/steering") {
car.setAngle(message.toInt());
} else {
Serial.println(topic + " " + message);
}
});
}
}
void loop() {
if (mqtt.connected()) {
mqtt.loop();
const auto currentTime = millis();
static auto previousTransmission = 0UL;
if (currentTime - previousTransmission >= oneSecond) {
previousTransmission = currentTime;
const auto distance = String(front.getDistance());
// ================= 3
mqtt.publish("/smartcar/ultrasound/front", distance);
}
}
#ifdef __SMCE__
// Avoid over-using the CPU if we are running in the emulator
delay(1);
#endif
}
我用內(nèi)聯(lián)注釋突出顯示了草圖中的三個有趣點(diǎn),然后是=================:
-
這是與 MQTT 代理建立連接的地方。如果沒有傳遞參數(shù),
begin那么它將連接到localhost. 您有責(zé)任在本地或遠(yuǎn)程主機(jī)上設(shè)置代理。 - 在這里,我們訂閱我們感興趣的主題,并定義一旦收到帶有特定主題的消息將發(fā)生什么。
- 我們想提供一些反饋,因此我們每隔一秒發(fā)送/發(fā)布前視超聲波傳感器測量的距離。
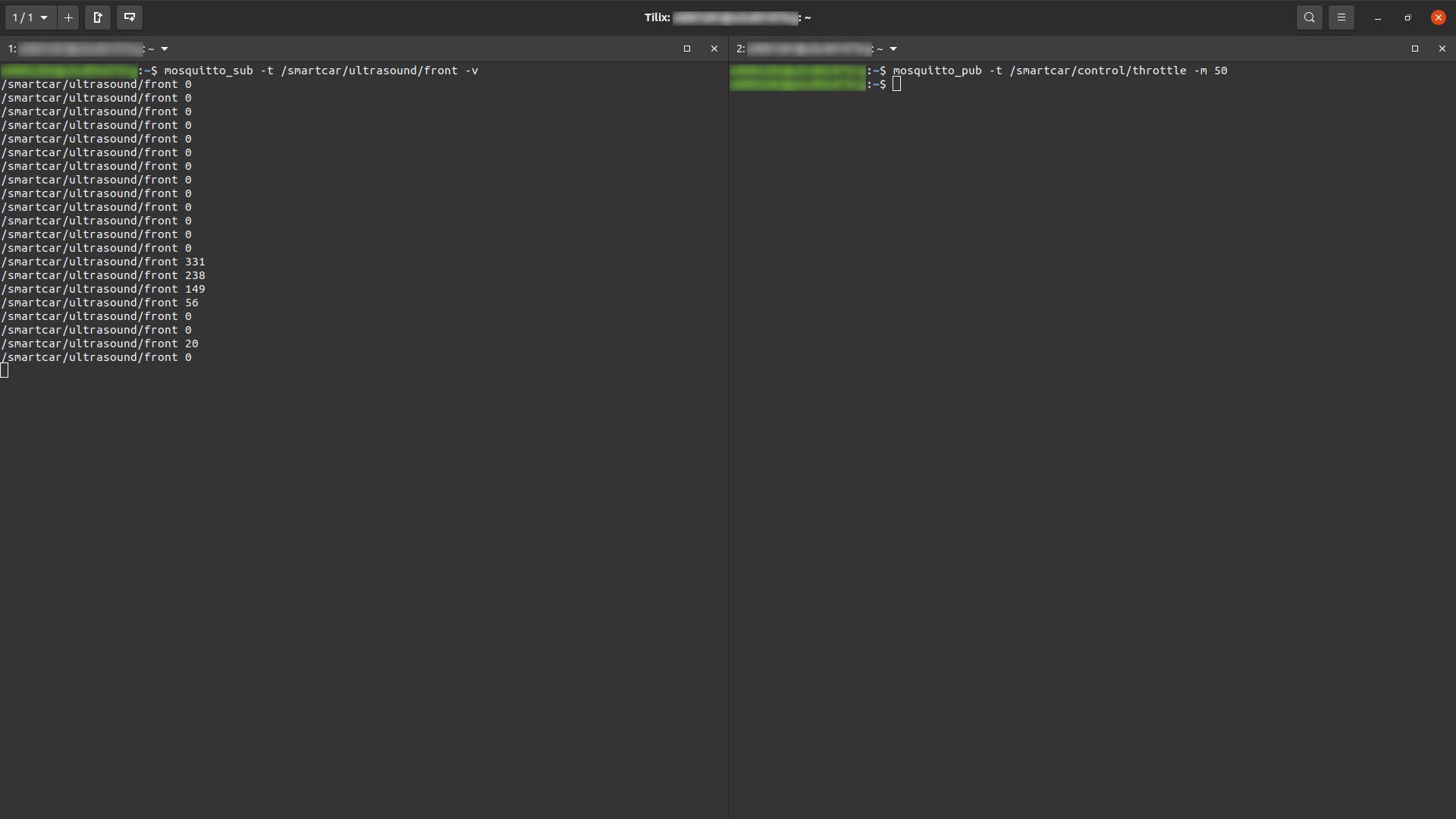
如果您使用的是 Ubuntu,Mosquitto是最容易設(shè)置的 MQTT 代理之一。我使用mosquitto_pub和mosquitto_sub實(shí)用程序訂閱前超聲波傳感器測量并發(fā)送油門命令,如下面的屏幕截圖所示。50一旦在/smartcar/control/throttle主題上得到適當(dāng)?shù)南ⅲ?/font>汽車就開始加速行駛,并在/smartcar/ultrasound/front.
相機(jī)
當(dāng)試圖了解你的漫游者的環(huán)境時,傳感器只能讓你走這么遠(yuǎn)。SMCE 允許您獲取虛擬世界的圖像流。這樣,您既可以在汽車的微控制器本身上進(jìn)行一些非常簡單的圖像處理,也可以將圖像流廣播到功能更強(qiáng)大的設(shè)備并在那里進(jìn)行圖像處理。為簡單起見,SMCE 僅支持Arduino_OV767X庫,并且可以利用 MQTT 來廣播流。讓我們看一個草圖,它為 MQTT 客戶端偵聽提供圖像流/smartcar/camera。和之前一樣,只是增加了攝像頭流:
#include
#include <MQTT.h>
#include <WiFi.h>
#include <OV767X.h>
#include <Smartcar.h>
#ifndef __SMCE__
WiFiClient net;
#endif
MQTTClient mqtt;
ArduinoRuntime arduinoRuntime;
BrushedMotor leftMotor(arduinoRuntime, smartcarlib::pins::v2::leftMotorPins);
BrushedMotor rightMotor(arduinoRuntime, smartcarlib::pins::v2::rightMotorPins);
DifferentialControl control(leftMotor, rightMotor);
SimpleCar car(control);
const auto oneSecond = 1000UL;
const auto triggerPin = 6;
const auto echoPin = 7;
const auto maxDistance = 400;
SR04 front(arduinoRuntime, triggerPin, echoPin, maxDistance);
std::vector<char> frameBuffer;
void setup() {
Serial.begin(9600);
Camera.begin(QVGA, RGB888, 15);
// ================= 1
frameBuffer.resize(Camera.width() * Camera.height() * Camera.bytesPerPixel());
#ifdef __SMCE__
// mqtt.begin("aerostun.dev", 1883, WiFi);
mqtt.begin(WiFi); // Will connect to localhost
#else
mqtt.begin(net);
#endif
if (mqtt.connect("arduino", "public", "public")) {
mqtt.subscribe("/smartcar/control/#", 1);
mqtt.onMessage([](String topic, String message) {
if (topic == "/smartcar/control/throttle") {
car.setSpeed(message.toInt());
} else if (topic == "/smartcar/control/steering") {
car.setAngle(message.toInt());
} else {
Serial.println(topic + " " + message);
}
});
}
}
void loop() {
if (mqtt.connected()) {
mqtt.loop();
const auto currentTime = millis();
static auto previousFrame = 0UL;
// ================= 2
if (currentTime - previousFrame >= 65) {
previousFrame = currentTime;
Camera.readFrame(frameBuffer.data());
mqtt.publish("/smartcar/camera", frameBuffer.data(), frameBuffer.size(),
false, 0);
}
static auto previousTransmission = 0UL;
if (currentTime - previousTransmission >= oneSecond) {
previousTransmission = currentTime;
const auto distance = String(front.getDistance());
mqtt.publish("/smartcar/ultrasound/front", distance);
}
}
#ifdef __SMCE__
// Avoid over-using the CPU if we are running in the emulator
delay(1);
#endif
}
- 在堆上分配足夠的內(nèi)存以包含單個幀。
-
每
65毫秒,從相機(jī)中讀取一幀并將其復(fù)制到frameBuffer. 然后通過 MQTT 廣播它。
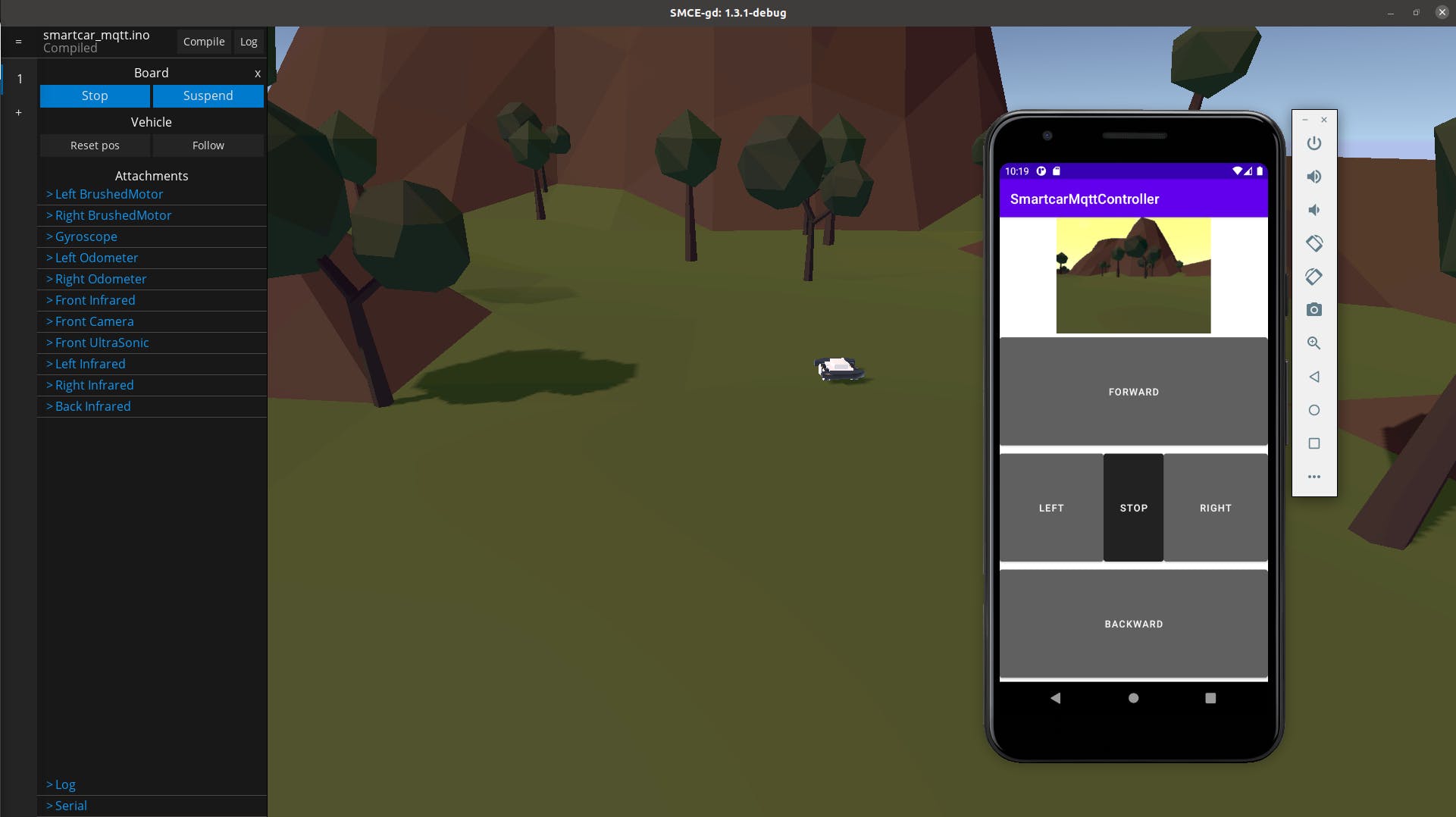
為了向您展示這在真實(shí)場景中會是什么樣子,您可以使用參考 Android 應(yīng)用程序通過 MQTT 消息控制汽車以及可視化圖像流。它不是最漂亮的,但您將了解如何使用 JAVA 和 Android 完成事情的要點(diǎn)。
自定義傳感器配置
默認(rèn)情況下,車輛預(yù)裝了一組特定的傳感器、執(zhí)行器和可用引腳。這在 SMCE 的 wiki 中的車輛功能下進(jìn)行了描述。要使用您自己的設(shè)置,您可以定義您的自定義配置,使用與您的草圖json位于同一目錄中的文件。假設(shè)我們想要一個允許我們通過串行端口駕駛汽車的草圖(如前所述),從車輛的所有四個側(cè)面測量距離并將它們發(fā)送給我們。你最終會得到一個如下圖所示的草圖:
#include
const int fSpeed = 70; // 70% of the full speed forward
const int bSpeed = -70; // 70% of the full speed backward
const int lDegrees = -75; // degrees to turn left
const int rDegrees = 75; // degrees to turn right
const unsigned long transmissionInterval = 100; // In milliseconds
const int maxDistance = 300;
ArduinoRuntime arduinoRuntime;
BrushedMotor leftMotor(arduinoRuntime, smartcarlib::pins::v2::leftMotorPins);
BrushedMotor rightMotor(arduinoRuntime, smartcarlib::pins::v2::rightMotorPins);
DifferentialControl control(leftMotor, rightMotor);
SimpleCar car(control);
// ================= 1
SR04 left(arduinoRuntime, 2, 3, maxDistance); // trigger and echo pin respectively
SR04 right(arduinoRuntime, 4, 5, maxDistance);
SR04 front(arduinoRuntime, 6, 7, maxDistance);
SR04 back(arduinoRuntime, 16, 17, maxDistance);
void setup()
{
Serial.begin(9600);
}
void loop()
{
static auto previousTransmission = 0UL;
const auto currentTime = millis();
// ================= 2
if (currentTime > previousTransmission + transmissionInterval) {
previousTransmission = currentTime;
Serial.println("===");
Serial.println("Left: " + String(left.getDistance()));
Serial.println("Right: " + String(right.getDistance()));
Serial.println("Front: " + String(front.getDistance()));
Serial.println("Back: " + String(back.getDistance()));
}
handleInput();
#ifdef __SMCE__
// Avoid over-using the CPU if we are running in the emulator
delay(1);
#endif
}
void handleInput()
{
if (Serial.available())
{
char input = Serial.read(); // read everything that has been received so far and log down
// the last entry
switch (input)
{
case 'l': // rotate counter-clockwise going forward
car.setSpeed(fSpeed);
car.setAngle(lDegrees);
break;
case 'r': // turn clock-wise
car.setSpeed(fSpeed);
car.setAngle(rDegrees);
break;
case 'f': // go ahead
car.setSpeed(fSpeed);
car.setAngle(0);
break;
case 'b': // go back
car.setSpeed(bSpeed);
car.setAngle(0);
break;
default: // if you receive something that you don't know, just stop
car.setSpeed(0);
car.setAngle(0);
}
}
}
-
在這里,我們定義了我們的傳感器應(yīng)該連接到的引腳。例如,
left超聲波 (SR04) 傳感器連接到引腳2和3。前者是觸發(fā)銷,后者是回聲銷。 -
我們通過串行端口“打印”出測量值,間隔由 的值指定
transmissionInterval。
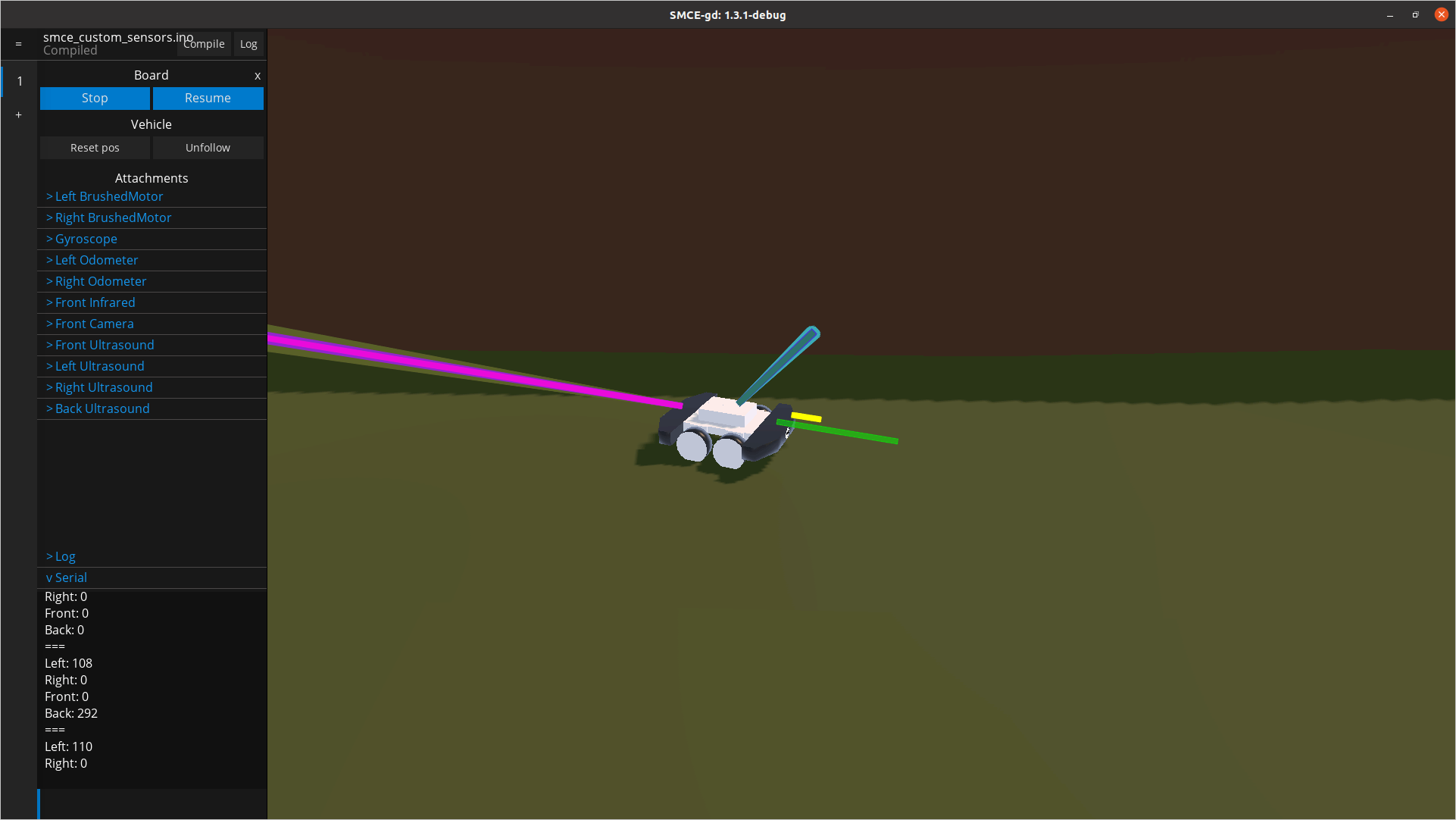
默認(rèn)設(shè)置不支持上面的草圖,原因有兩個:(a)默認(rèn)汽車沒有配備四個傳感器,而SR04只有一個,(b)在典型 ESP32 板上可用的引腳在默認(rèn)情況下不可用仿真板。幸運(yùn)的是,我們可以改變它!我們需要做的第一件事是使所有必要的引腳可用,并確保它們是正確的類型(即數(shù)字或模擬)。在這里我們應(yīng)該注意,由于技術(shù)原因,傳感器的回波引腳必須指定為。以下是您應(yīng)該遵循的步驟:1617SR04analog
-
在與您的草圖相同的目錄中創(chuàng)建一個空文件。
board_config.json - 獲取SMCE 使用的默認(rèn)板配置,以便我們可以在它的基礎(chǔ)上進(jìn)行構(gòu)建(補(bǔ)丁)。
-
使用該
gpio_drivers屬性來指定您的草圖需要的所有引腳。注意:不要忘記您需要指定電機(jī)、里程表(如果您使用它們)、陀螺儀等所需的引腳。就我而言,我想移除一些我不使用的引腳(0和),1添加新的(16和17)并確保SR04傳感器使用的所有引腳都處于正確的模式。
{
"gpio_drivers": [
{ "pin": 2, "digital": true },
{ "pin": 3, "analog": true },
{ "pin": 4, "digital": true },
{ "pin": 5, "analog": true },
{ "pin": 6, "digital": true },
{ "pin": 7, "analog": true },
{ "pin": 16, "digital": true },
{ "pin": 17, "analog": true },
{ "pin": 12, "digital": true },
{ "pin": 13, "analog": true },
{ "pin": 14, "digital": true },
{ "pin": 18, "analog": true },
{ "pin": 25, "digital": true },
{ "pin": 26, "digital": true },
{ "pin": 27, "analog": true },
{ "pin": 34, "digital": true },
{ "pin": 35, "analog": true },
{ "pin": 85, "analog": true },
{ "pin": 135, "analog": true },
{ "pin": 39, "digital": true },
{ "pin": 36, "analog": true },
{ "pin": 86, "analog": true },
{ "pin": 136, "analog": true },
{ "pin": 250, "digital": true },
{ "pin": 205, "analog": true }
]
}
創(chuàng)建board_config.json指定仿真 Arduino 板上可用引腳的文件后,是時候設(shè)置您的車輛了。同樣,我們將使用默認(rèn)設(shè)置來獲取靈感并相應(yīng)地對其進(jìn)行修補(bǔ)。
-
在與您的草圖相同的目錄中創(chuàng)建一個文件。
vehicle_config.json - 獲取 SMCE 使用的默認(rèn)車輛配置,以便我們在此基礎(chǔ)上進(jìn)行構(gòu)建。
-
更改
slots您感興趣的。在我的情況下,我想在和插槽上連接SR04傳感器Left,使用與草圖中相同的引腳,并確保這些引腳已經(jīng)被.RightBackboard_config.json
{
"slots": {
"Left": {
"class": "UltraSonic",
"name": "Left Ultrasound",
"props": {
"trigger_pin": 2,
"echo_pin": 3
}
},
"Right": {
"class": "UltraSonic",
"name": "Right Ultrasound",
"props": {
"trigger_pin": 4,
"echo_pin": 5
}
},
"FrontTop": {
"class": "UltraSonic",
"name": "Front Ultrasound",
"props": {
"trigger_pin": 6,
"echo_pin": 7
}
},
"Back": {
"class": "UltraSonic",
"name": "Back Ultrasound",
"props": {
"trigger_pin": 16,
"echo_pin": 17
}
}
}
}
專業(yè)提示:如果您想完全覆蓋任何配置,可以將from_scratch頂級元素添加為true. 如果您想完全移除占用您根本不使用的插槽的攝像頭或其他傳感器,這將非常有用。引腳也是如此。例如,下面的配置將創(chuàng)建一輛汽車,其后側(cè)僅配備一個超聲波傳感器和一對電機(jī)。沒有別的,沒有相機(jī),沒有里程表,沒有陀螺儀。
{
"from_scratch": true,
"vehicle": "RayCar",
"slots": {
"Back": {
"class": "UltraSonic",
"name": "Back Ultrasound",
"props": {
"trigger_pin": 16,
"echo_pin": 17
}
}
},
"builtin": {
"Left BrushedMotor": {
"forward_pin": 12,
"backward_pin": 14,
"enable_pin": 13
},
"Right BrushedMotor": {
"forward_pin": 25,
"backward_pin": 26,
"enable_pin": 27
}
}
}
修改環(huán)境
。
?
- 生存危機(jī)-Arduino角色扮演游戲模擬器
- Wokwi Arduino模擬器介紹
- 用于飛行模擬器的帶Arduino的LCD面板
- 停車模擬器開源硬件
- 基于Arduino Nano R3的DIY 2D運(yùn)動賽車模擬器 1次下載
- 帶有Arduino的糾纏量子比特模擬器
- Arduino Altair 8800模擬器
- 通過在線模擬器上的Arduino操作伺服電機(jī)
- DIY 2D運(yùn)動賽車模擬器
- Arduino模擬器開源分享
- 一個真正的Arduino UNO電子寵物模擬器
- 基于DSP的電磁脈沖模擬器控制系統(tǒng)設(shè)計方案 13次下載
- 倍福基于PC和EtherCAT的控制平臺控制的賽車模擬器 13次下載
- 汽車駕駛模擬器控制系統(tǒng)的設(shè)計
- 汽車駕駛模擬器新一代實(shí)時場景系統(tǒng)的開發(fā)
- DC/DC模擬器的特征和使用方法 768次閱讀
- 使用Netropy廣域網(wǎng)模擬器測試簡化SD-WAN測試 570次閱讀
- 華為eNSP模擬器安裝教程 3100次閱讀
- 華為新版模擬器eNSP Lite 6067次閱讀
- 華為新版模擬器eNSP Lite安裝攻略 7320次閱讀
- 用于測試項(xiàng)目的4個最佳樹莓派Raspberry Pi模擬器 6823次閱讀
- 具有故障注入功能的高精度旋轉(zhuǎn)變壓器模擬器系統(tǒng) 5827次閱讀
- 如何對PNET 模擬器進(jìn)行初始化安裝 2054次閱讀
- 使用LED作為模擬輸出的汽車警報模擬器電路 1904次閱讀
- HarmonyOS本地模擬器的版本演進(jìn)與使用方法 6276次閱讀
- 基于CPLD芯片在汽車駕駛模擬器系統(tǒng)中的應(yīng)用研究 2644次閱讀
- 基于AT89C52單片機(jī)和傳感器實(shí)現(xiàn)汽車駕駛模擬器單片機(jī)系統(tǒng)的應(yīng)用方案 3490次閱讀
- 基于QEMU系統(tǒng)模擬器Xilinx/QEMU的運(yùn)行與調(diào)試 9210次閱讀
- 基于TL431的電動汽車多節(jié)串聯(lián)鋰電池模擬器 7802次閱讀
- 基于FPGA的飛行模擬器通信接口設(shè)計 2763次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論