 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
讓我們看看如何讓 Lego Ev3 機器人與 BluPants 一起工作。
注意:SD 卡鏡像已于 2020 年 10 月 31 日更新。新版本修復了錯誤并增加了對樂高教育機器人的適當支持。如果您運行的是舊版本,請考慮更新它:
構建你的機器人
默認情況下,BluPants 與Gripp3r和Education Ev3機器人一起使用。組裝它們的說明可以在樂高的網站上找到。
您不必制造與我們完全相同的機器人。只要您以與我們在機器人上使用相同的方式連接電機,BluPants 也可以在您的機器人上無縫工作。不過,對blupants.json的額外調整可能會給您帶來更高的準確性。有關詳細信息,請參閱“校準您的機器人”部分。
BluPants 默認設置如下:
- 爪式電機連接到端口 A
- 左輪電機連接到端口 B
- 右輪電機連接到端口 C
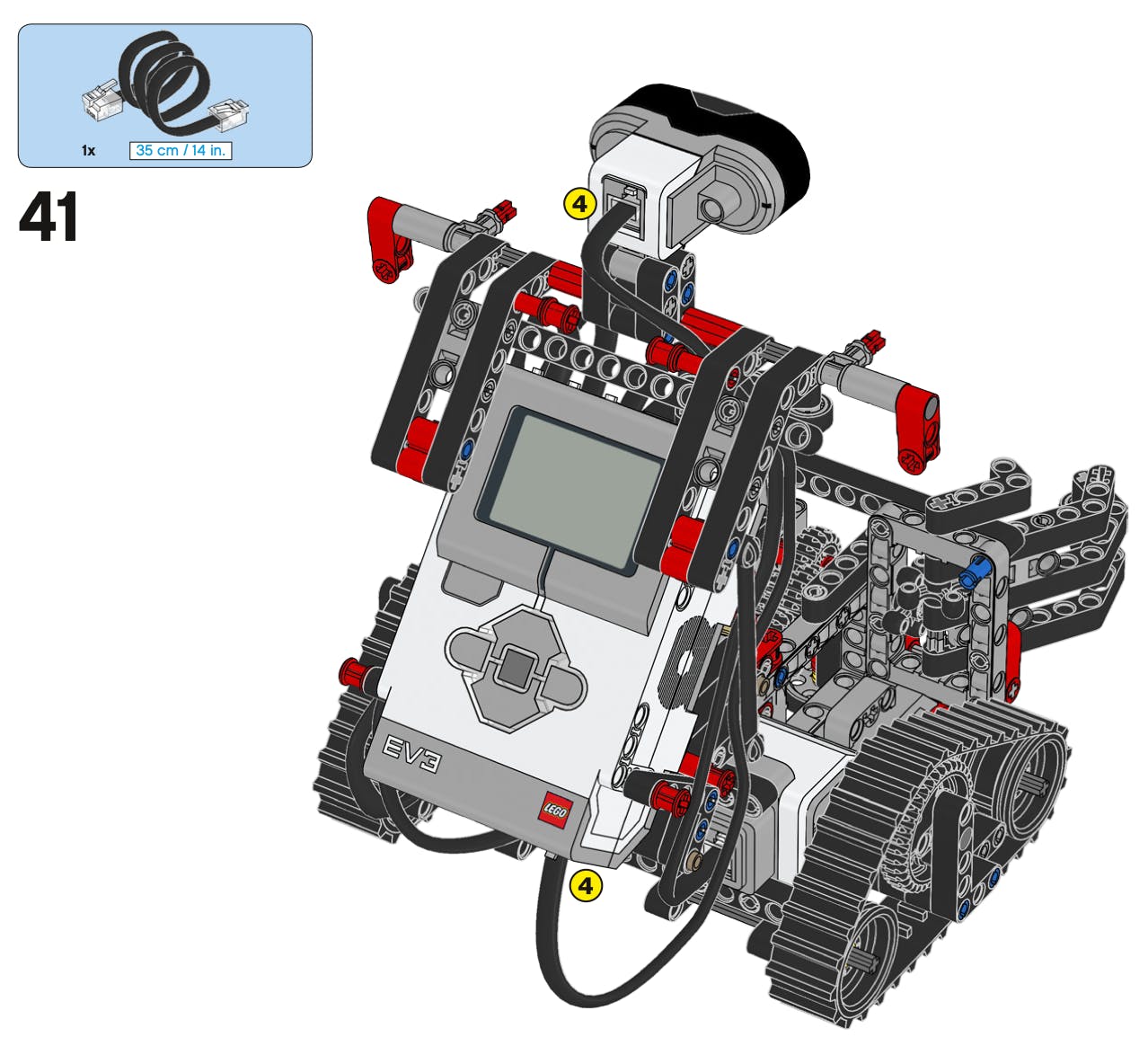
- 距離傳感器連接到端口 4
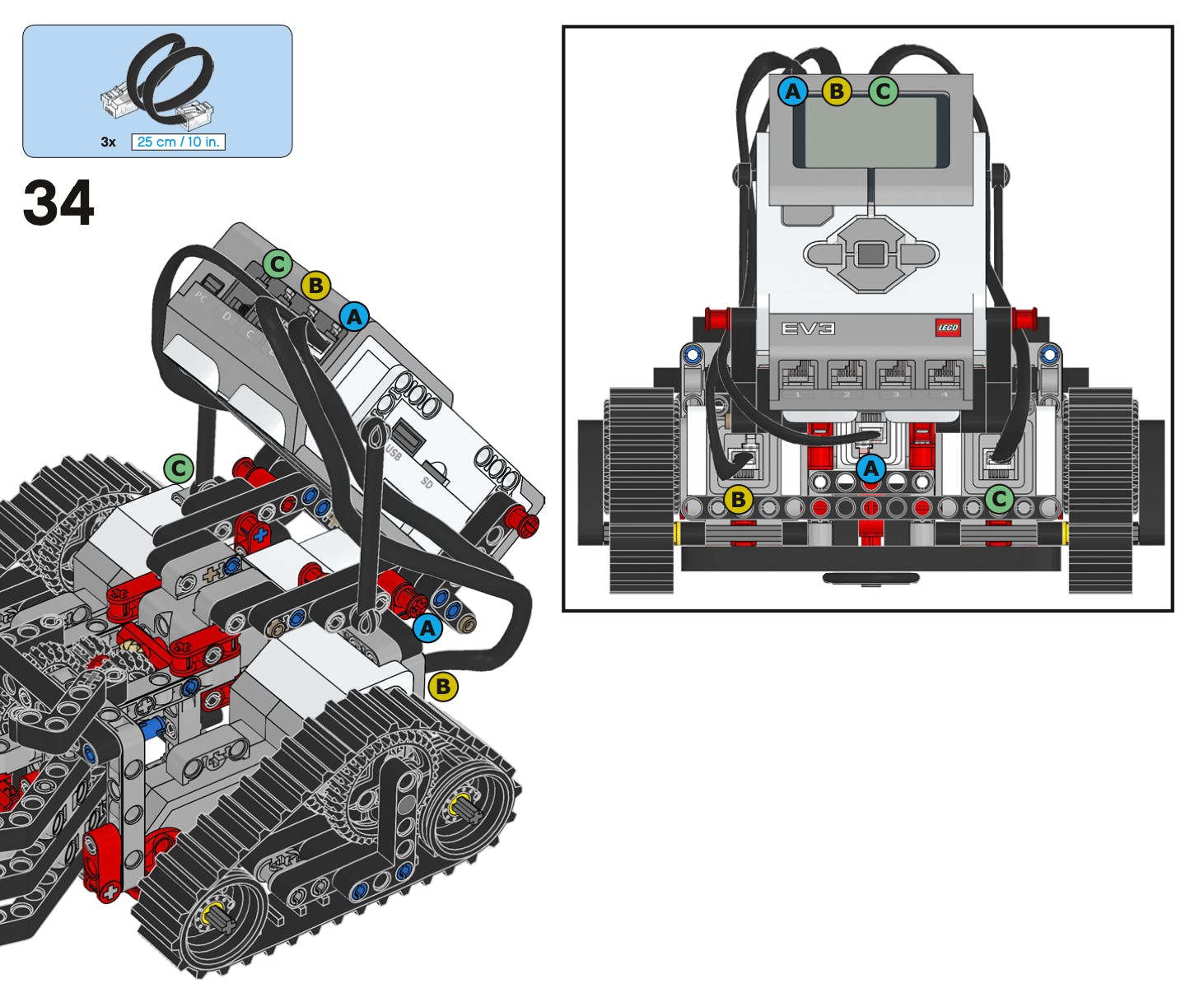
距離傳感器應連接到端口 4。
組裝好機器人后,就可以用 BluPants 映像刷入 micro SD 卡了。無論您使用何種文檔,只要確保將正確的 BluPants 映像文件閃存到您的 SD 卡即可。
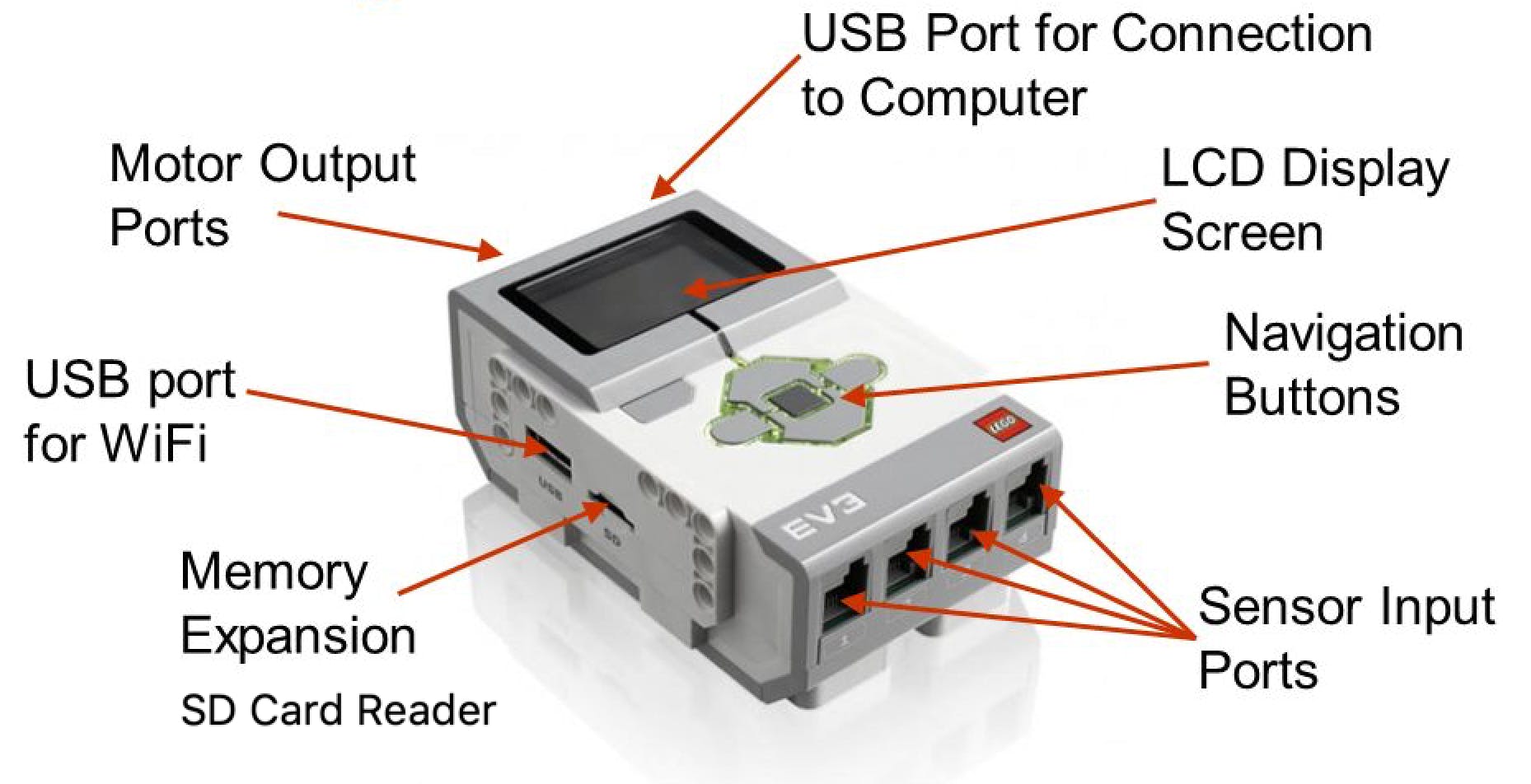
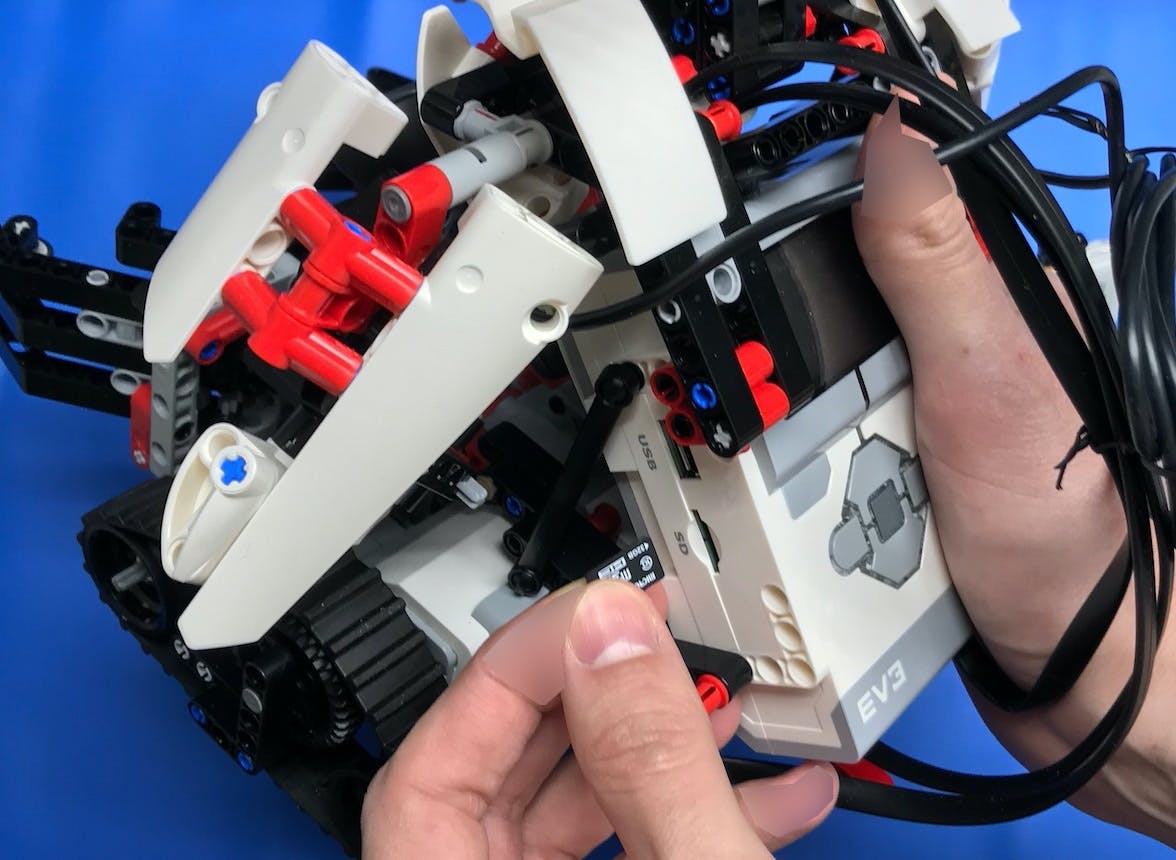
在 Ev3 積木的左側找到內存擴展端口(SD 卡讀卡器)。
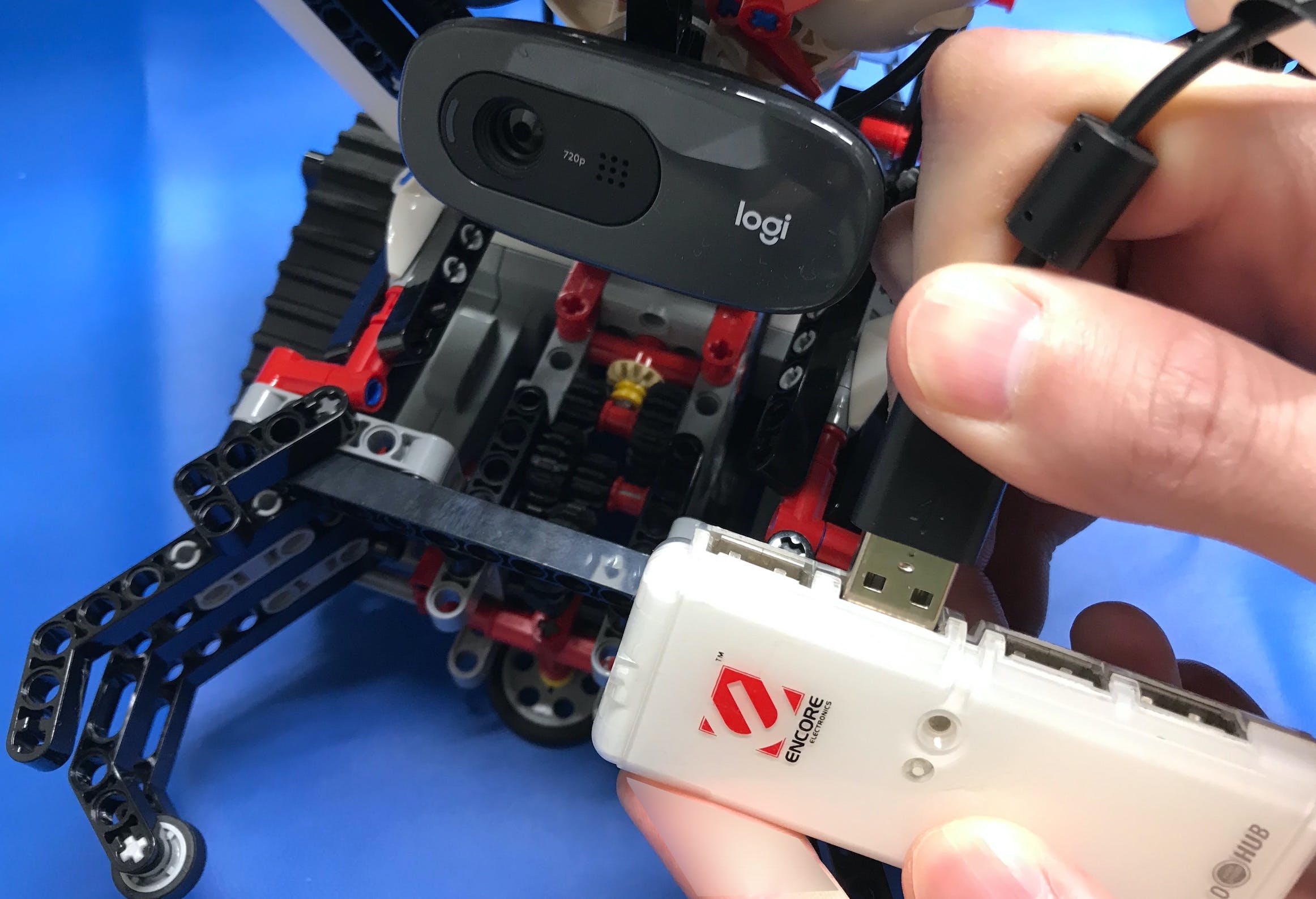
刷完 SD 卡后,關閉您的 Ev3 積木,然后插入卡,如下圖所示:
找到 WiFi 的 USB 端口并直接連接您的 USB WiFi 加密狗。或者,如果您還使用 USB 攝像頭,請連接 USB 集線器。在下面的圖片中,我們使用 USB 集線器連接 WiFi 加密狗和相機。
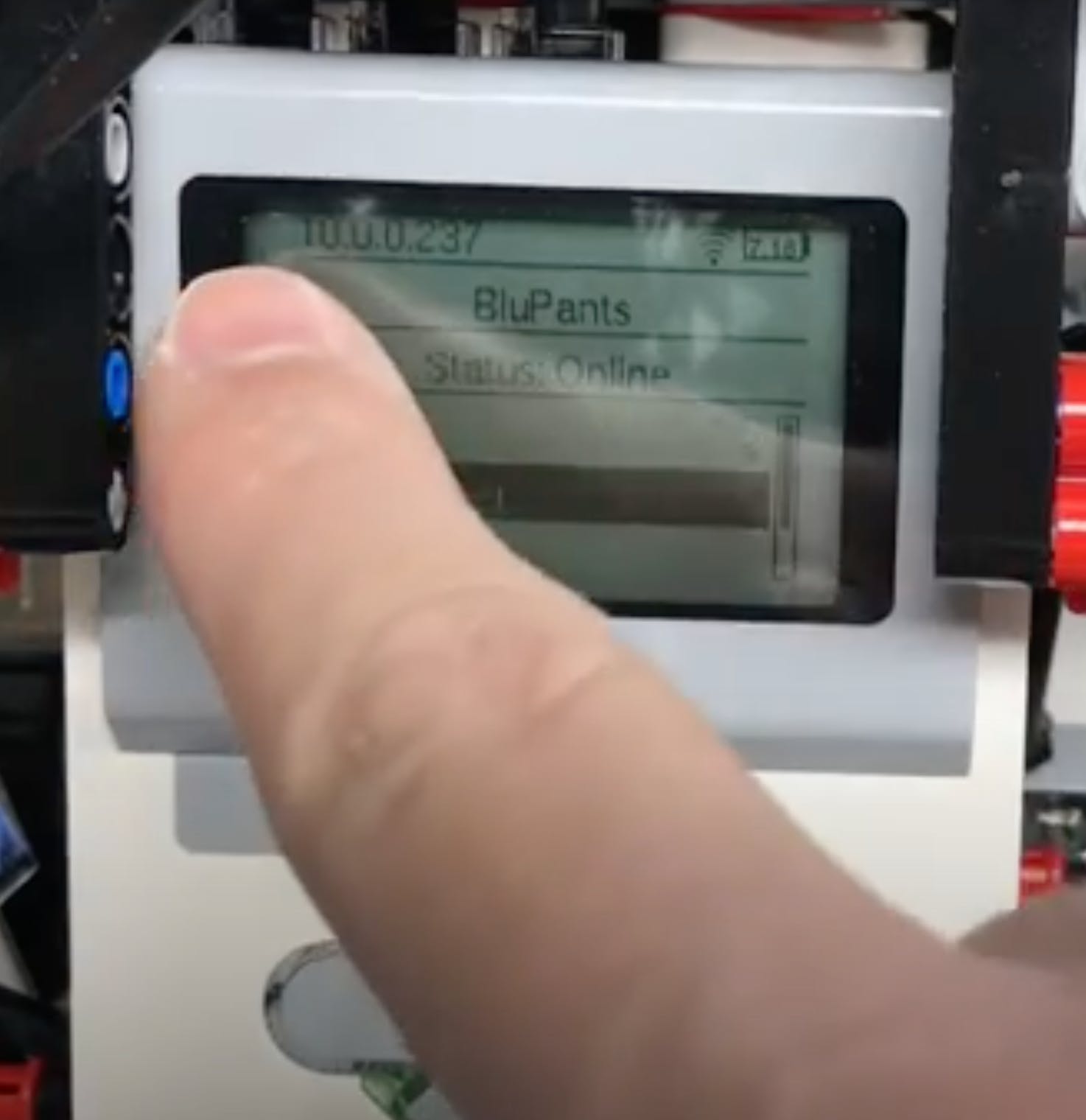
。你的很可能會有所不同。看到您的 IP 地址后,您確認您的機器人已連接并準備好開始使用 BluPants 進行編碼。
編碼時間!
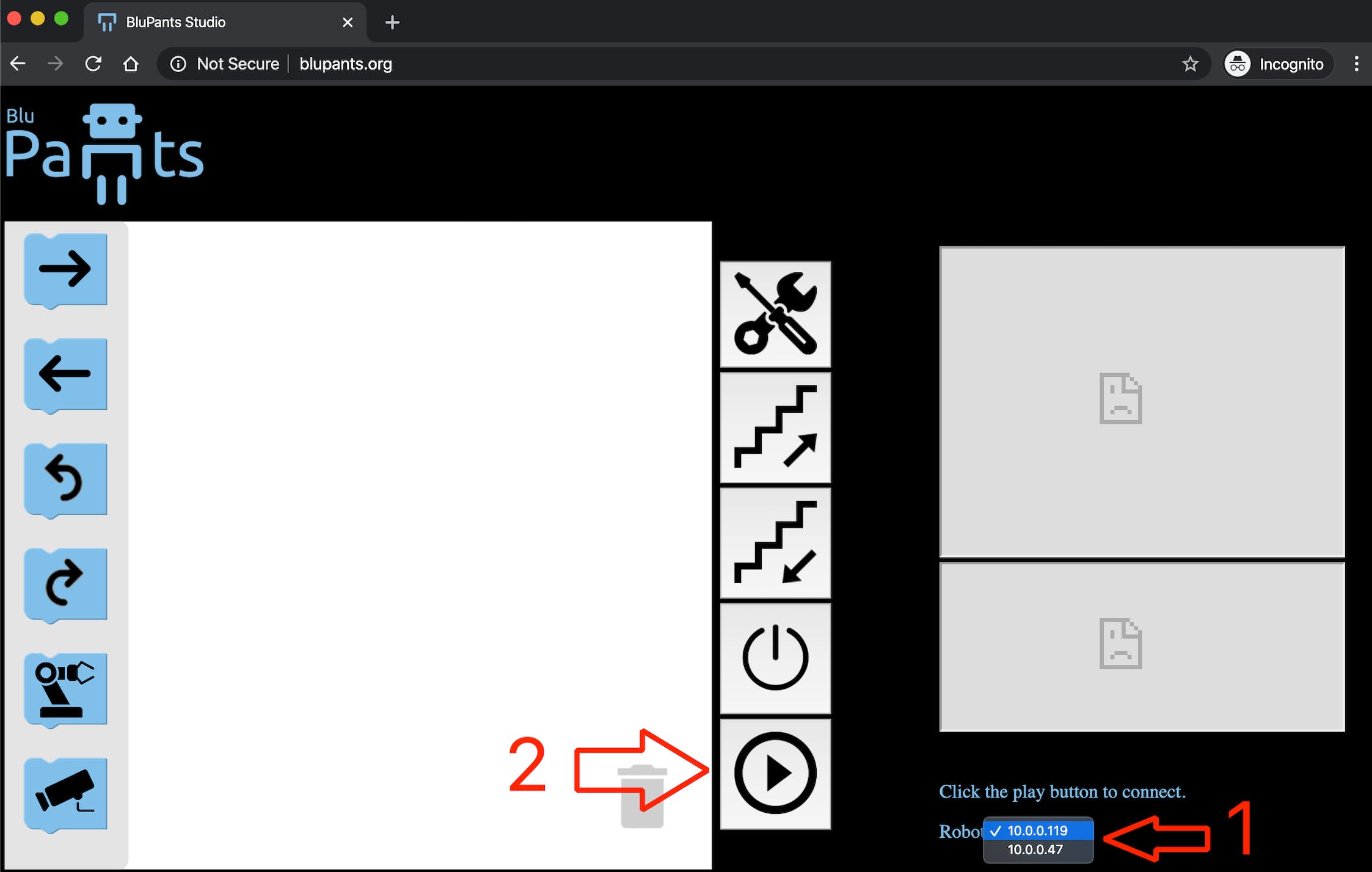
將機器人連接到 WiFi 后,打開瀏覽器并訪問http://blupants.org。確保您用于瀏覽的計算機也連接到您連接 Ev3 的同一個 WiFi 網絡。
在“機器人”下拉菜單(右下角)上,確保您看到了您的 Ev3 IP 地址,然后單擊“播放”。如果您在列表中看不到任何內容,請嘗試重新加載頁面和/或關閉并重新打開瀏覽器。機器人 IP 僅在頁面完全加載后顯示:
就是這樣!您已準備好使用 BluPants 提高您的編碼技能。
請記住,BluPants 是一個多平臺的編碼環境。這意味著,您可以使用 Lego Ev3 享受相同的學習體驗,也可以使用更實惠的機器人來完成,例如 Beaglebones 和 RaspberryPies。
查看 BluPants Youtube 頻道,或訪問www.blupants.com以獲取有關如何以輕松有趣的方式學習編碼的更多示例和詳細信息。在Twitter 上關注我們以隨時關注所有新版本。
機器人配置文件
您可以通過編輯其配置文件來更改您的機器人設置。所有設置都可以通過編輯機器人本地 Linux 文件系統上的“/root/blupants.json”文件來自定義。您可以像訪問任何常規 Linux 機器一樣訪問和編輯配置文件。我們將介紹兩個選項:
您應該做的第一件事是使用默認憑據登錄機器人并更改密碼。在 EV3 積木 LCD 顯示屏的左上角檢查您的機器人 IP 地址。就我而言,它是:“10.0.0.237”。
您的機器人的默認憑據是:
user: root
password: temppwd
從您的本地計算機運行以下命令以連接到您的機器人并在那里打開一個外殼:
macOS / Linux
$ ssh root@10.0.0.237
帶有膩子的窗戶
C:\Users\user>putty root@10.0.0.237
請記住將“10.0.0.237”替換為您的特定機器人 IP 地址。
提供密碼“tempppwd”。
% ssh root@10.0.0.237
Password:
Linux ev3dev 4.14.117-ev3dev-2.3.5-ev3 #1 PREEMPT Sat Mar 7 12:54:39 CST 2020 armv5tejl
_____ _
_____ _|___ / __| | _____ __
/ _ \ \ / / |_ \ / _` |/ _ \ \ / /
| __/\ V / ___) | (_| | __/\ V /
\___| \_/ |____/ \__,_|\___| \_/
Debian stretch on LEGO MINDSTORMS EV3!
Last login: Sat Oct 31 16:44:25 2020 from 10.0.0.34
root@ev3dev:~#
登錄后,通過運行命令“passwd”更改密碼:
root@ev3dev:~# passwd
Enter new UNIX password:
Retype new UNIX password:
passwd: password updated successfully
提供您的新密碼,并確保記住它。從現在開始,您將在需要登錄 EV3 Linux 系統時使用它。
轉到 /root 文件夾并確保那里有可用的 blupants.json 文件
root@ev3dev:~# cd /root
root@ev3dev:~# ls
blupants_ev3_gripp3r.json blupants_ev3.json blupants.json
root@ev3dev:~#
現在,您可以使用您喜歡的文本編輯器(例如 nano 或 vi)來編輯文件。
root@ev3dev:~# vi blupants.json
或者
root@ev3dev:~# nano blupants.json
或者,您可以復制要在本地計算機上編輯的文件,并在那里使用它。為此,您甚至不需要在 ssh 會話上登錄您的 Ev3。在您的本地計算機上,只需運行“scp”或“pscp”即可將 blupants.json 配置文件從機器人復制到您的計算機:
macOS / Linux
$ scp root@10.0.0.237:/root/blupants.json .
帶有膩子的窗戶
C:\Users\user>pscp -P 22 root@10.0.0.237:/root/blupants.json .
然后,您可以使用您喜歡的文本編輯器在本地計算機上打開 blupants.json 文件進行編輯。對于 Windows 用戶,我們建議使用Notepad++ 。Notepad++ 可以在這里下載。
訪問下一部分,了解如何通過更改默認配置文件來校準您的機器人。然后,一旦你完成編輯,保存它,并將其復制回你的機器人:
macOS / Linux
$ scp blupants.json root@10.0.0.237:/root/blupants.json
帶有膩子的窗戶
C:\Users\user>pscp -P 22 blupants.json root@10.0.0.237:/root/blupants.json
永遠記得用機器人的 IP 地址替換“10.0.0.237”。
請記住,配置文件必須符合 json 格式。如果您破壞它,機器人將停止工作,直到您提供另一個有效的配置文件。假設您完全破壞了 blupants.json 文件。如果發生這種情況,您需要做的就是從GitHub獲取原始副本并將其恢復到您的機器人,替換損壞的文件。
例如,如果您需要恢復教育文件,請從此鏈接獲取原始內容并使用“scp”或“pscp”將其復制回機器人的 /root/blupants.json 文件。如果您需要原始 Gripp3r 配置的副本,可以從此鏈接獲取。
現在您知道如何訪問您的配置文件,讓我們看看如何更改它以校準您的機器人并使其更準確。
校準您的機器人
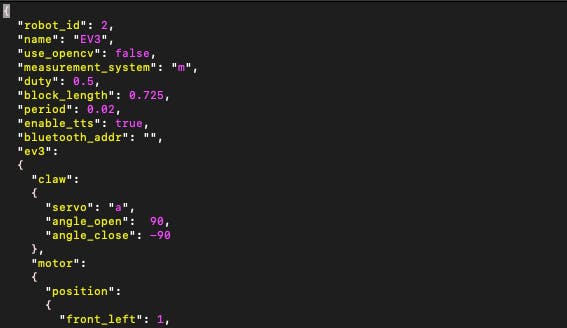
要校準您的機器人,您需要編輯 blupants.json 配置文件。訪問上一節以了解如何訪問您的 blupants.json 文件以進行編輯。這是標準 blupants.json 文件的有效格式:
{
"robot_id": 2,
"name": "EV3",
"use_opencv": false,
"measurement_system": "m",
"duty": 0.5,
"block_length": 0.725,
"period": 0.02,
"enable_tts": true,
"bluetooth_addr": "",
"ev3":
{
"claw":
{
"servo": "a",
"angle_open": 90,
"angle_close": -90
},
"motor":
{
"position":
{
"front_left": 1,
"front_right": 2,
"back_left": 3,
"back_right": 4
},
"duty_ratio": [1.0, 1.0, 1.0, 1.0],
"turn_right_period": 0.007,
"turn_left_period": 0.007
},
"camera":
{
"servo_horizontal": "c",
"servo_vertical": "d"
}
}
}
永遠不應更改該字段。"robot_id": 2對于所有樂高 Ev3 機器人,該值應始終為 2。
但是,可以自定義該字段"name",它將幫助您識別您的機器人,特別是如果您有多個機器人連接到同一網絡。要有創意,給你的機器人起一個很酷的名字。
由于樂高硬件不幸不支持 OpenCV,因此該字段被忽略。"use_opencv"
現場"measurement_system": "m"告訴機器人在使用超聲波傳感器測量距離時使用公制。如果要使用皇家系統,將其更改為“r”:
"measurement_system": "r",
如果您使用的是紅外傳感器,則忽略此字段。測量值(范圍從 0 到 60)將顯示為厘米。
該字段"duty": 0.5告訴機器人在旋轉車輪上使用的電機時使用 50% 的功率。它可以設置為從 0(無功率)到 1(全功率/100%)的任何值。
該字段"block_length"告訴您的機器人在當前任務向前移動一格時將行進多少。假設您正在處理一張小地圖,您可能想要減小“block_length”的值。對于更大的地圖,您可能需要增加它。
該字段"period"未使用。
該字段"enable_tts": true將啟用文本到語音模塊。如果要禁用它,請將其設置為 false。禁用 TTS 時,機器人執行命令的速度更快。如果您打算使用函數say() ,則需要啟用 TTS 才能聽到機器人說話。
字段"bluetooth_addr"未使用。
該字段"ev3"->"claw"->"servo":"a"定義了您連接爪式電機的端口。假設端口 A、B 和 C 已被占用,您需要將其連接到端口 D。將值更改為“servo”:“d”。
該字段"ev3"->"claw"->"angle_open":"90"告訴您的伺服電機必須旋轉多少度,以便您的機器人可以張開爪子。類似地,"ev3"->"claw"->"angle_close":"-90"定義閉合角度。請注意,與 Gripper 相比,Educational 機器人將使用截然不同的角度。如果您組裝一個完全不同的爪,根據其物理特性,您可能需要相應地自定義這些設置。
字段"ev3"->"motor"->"position"定義電機的順序。如果您在編寫 Ev3 時使用函數set_motors() ,這一點尤其重要。
字段"ev3"->"motor"->"duty_ratio": [1.0, 1.0, 1.0, 1.0],可用于補償一個車輪旋轉速度更快的一些問題。像這樣的問題會阻止機器人直行。數組中的第一個“1.0”定義了位置“1”(默認為front_left)定義的電機的系數,第二個“1.0”是定義為位置“2”的電機的系數,依此類推。例如,假設您的機器人在編程為直線移動時會向左移動一點。如果這是因為右電機的運行速度比左電機快而引起的,您可以通過降低右電機的值來調整 duty_ratio 來彌補這一點。例如:
"duty_ratio": [1.0, 0.95, 1.0, 1.0],
它將使正確的電機運行速度慢 5%,并可能補償由于一個電機運行速度比另一個電機快而引起的物理問題。
領域"ev3"->"motor"->"turn_right_period"和"ev3"->"motor"->"turn_left_period"是類似的。如果您將機器人編程為向右轉 90 度,但實際上它最終只轉了 60 度,您需要增加“turn_right_period”的值以正確校準它。同樣,假設您將機器人編碼為向左轉 90 度,而它轉為 140 度。您將需要減少“turn_left_period”值來解決這個問題。
當前未使用字段。"ev3"->"camera"它們旨在定義傾斜相機伺服連接到哪個端口。
參考
Lego Ev3 的 BluPants 圖像基于開源項目ev3dev 。我們要感謝 ev3dev 社區所做的出色工作。如果您想了解更多關于 ev3dev 的信息,請訪問:www.ev3dev.org 。
- 利用ev3 教程制作的手臂機器人
- LEGO EV3 Baby Yoda-Alexa控制的EV3機器人
- 由Mindstorms EV3和Alexa提供支持的LEGO Target Practice
- 由Alexa控制的Lego Mindstorms EV3機器人
- Vernie的語音控制,基于LEGO的機器人
- KUKA機器人編程 0次下載
- 使用LEGO MINDSTORMS EV3 Amazon Alexa構建的Shelly解決方案
- LEGO EV3神話生物DNA掃描儀開源
- ESP01S和Android 7+的移動設備一起工作的項目
- EV3使用NXT Hitechnic觸摸多路復用器
- Alexa EV3糖果機開源分享
- 機器人無線充電電路設計 47次下載
- 基于DSP和PC的農業機器人控制系統 17次下載
- 桌面式工作站ABB機器人培訓指導手冊 1次下載
- 協作機器人的介紹及其與工業機器人規模的差距介紹 8次下載
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- 一文看懂服務機器人發展前景 2519次閱讀
- ABB工業機器人的系統備份與恢復如何操作 1.3w次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3270次閱讀
- 工業機器人結構、驅動及技術指標詳解 3051次閱讀
- 這些水下機器人你見過嗎?一些水下機器人產品的介紹 1.4w次閱讀
- 云視頻技術讓機器人更具有娛樂性讓機器人更融入你的生活 3520次閱讀
- 基于PLC的機器人伺服運動控制系統設計詳解 1.5w次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 何為柔性機器人?如何讓機器人的身體柔若無骨? 1.1w次閱讀
- 機器人控制系統一文讓你全看懂 7431次閱讀
- 3種奇葩機器人的簡單介紹 5321次閱讀
- 《工業機器人技術及應用》讓人從認識到熟練掌握工業機器人 6437次閱讀
- 智能機器人的三大關鍵技術詳解 3.2w次閱讀
- 細數讓工業機器人更智能的6種傳感器 2441次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論