 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
另一個(gè)由兩部分組成的項(xiàng)目添加到我的“下一步我要構(gòu)建什么?” 系列。Osoyoo Mecanum 平臺現(xiàn)在價(jià)格實(shí)惠,可以使用 Arduino 和 Raspberry Pi 平臺進(jìn)行編碼。
我將從基于 Arduino 的平臺開始,因?yàn)檫@是我學(xué)習(xí)和開發(fā)的地方,也是我花費(fèi)最多時(shí)間嘗試修改代碼以使我的 mecanum 機(jī)器人按預(yù)期移動的地方。
這是基于 Raspberry Pi 平臺的鏈接:
https://www.hackster.io/alien-energy-3/what-do-i-build-next-two-mecanum-bots-part-2-6fd7c6
我在兩個(gè)平臺上都學(xué)到了關(guān)于軟件編碼的艱難方法,現(xiàn)在你不必再學(xué)了。我通常不會在我的項(xiàng)目前加上這么多“歷史信息”,但是這兩個(gè)版本花了我 6 個(gè)月的時(shí)間來解決我發(fā)現(xiàn)的所有編碼問題。
希望當(dāng)您閱讀并隨后決定可能購買此平臺的任一版本時(shí),我已注意到并記錄的軟件/編碼問題將由供應(yīng)商解決并合并。
我將在另一個(gè)項(xiàng)目列表中繼續(xù)使用基于 Raspberry Pi 3B+ 的平臺,因?yàn)樵谀抢镂沂褂昧宋覐倪@個(gè)基于 Arduino 2560 的 mecanum 機(jī)器人中學(xué)到的東西,并開發(fā)并花了將近三個(gè)月的時(shí)間來試驗(yàn)代碼修訂和故障排除接線以使我的 mecanum 機(jī)器人移動正如我所期望的那樣。
基于 Raspberry Pi 的 mecanum 機(jī)器人將需要我在 2019 年 1 月首次購買的基于 Arduino 的套件中未包含的額外硬件,但直到今年早些時(shí)候“2020”才構(gòu)建。
以下是“作為指南,成功構(gòu)建、編碼、調(diào)試和完成這個(gè)功能正常的 mecanum 機(jī)器人”所需的網(wǎng)頁鏈接。
“ https://osoyoo.com/2019/11/08/omni-direction-mecanum-wheel-robotic-kit-v1/ ”
“ https://osoyoo.com/2019/11/08/metal-chassis-mecanum-wheel-robotic-for-arduino-mega2560-lesson1-robot-car-assembly/ ”
“ https://osoyoo.com/2019/11/08/omni-direction-mecanum-wheel-robotic-kit-v1-lesson-2-tracking-line/ ”
在我解釋和展示構(gòu)建之前,我想列出經(jīng)驗(yàn)教訓(xùn)
1. 網(wǎng)頁鏈接(NEXT、BACK 等)可能會導(dǎo)致死頁或產(chǎn)品的不同版本,并且文本列表代碼超鏈接可能與指向相同代碼的嵌入式超鏈接不同(我發(fā)現(xiàn)使用文本鏈接下載的代碼版本與wget...超鏈接)一開始無法弄清楚,但下載代碼的并排比較證明我并沒有發(fā)瘋。
2. 裝配描述、圖紙或插圖可能不完整或不適用于您的機(jī)器人版本/型號
3. 網(wǎng)站所有者提供的下載代碼可能無法按預(yù)期工作或根本無法工作(繼續(xù)下一部分構(gòu)建或用作指南)
4. 依靠你的經(jīng)驗(yàn)來解決編碼錯(cuò)誤或異常;我發(fā)現(xiàn)這些多課程版本的代碼由不同的“編碼人員/個(gè)人”編寫,并且代碼片段的命名約定可能會因課程而異。
5. 在排查代碼時(shí)做筆記。
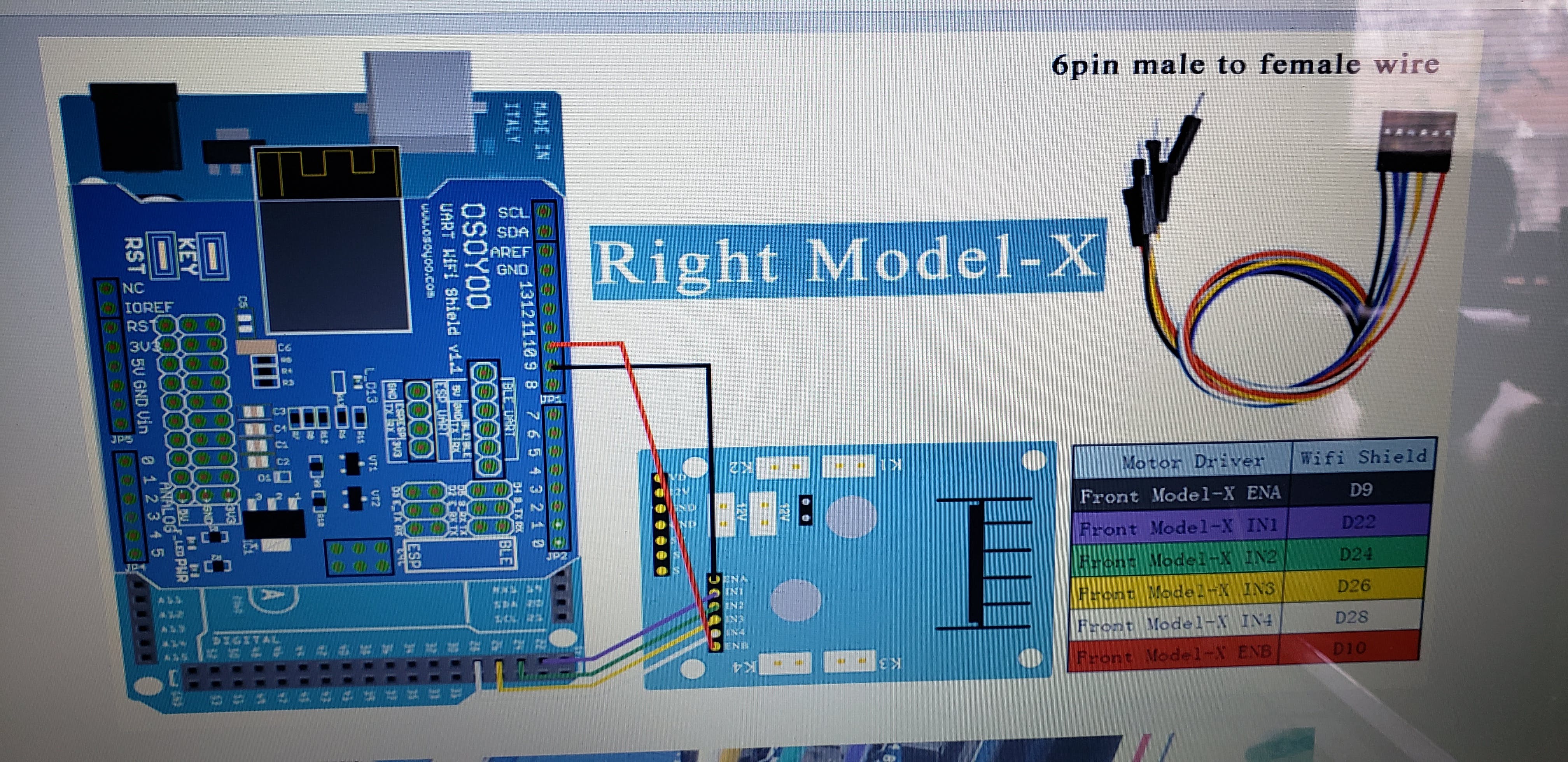
6. 注意電線/跳線的顏色和“圖示的引腳連接”與顯示的互連表。
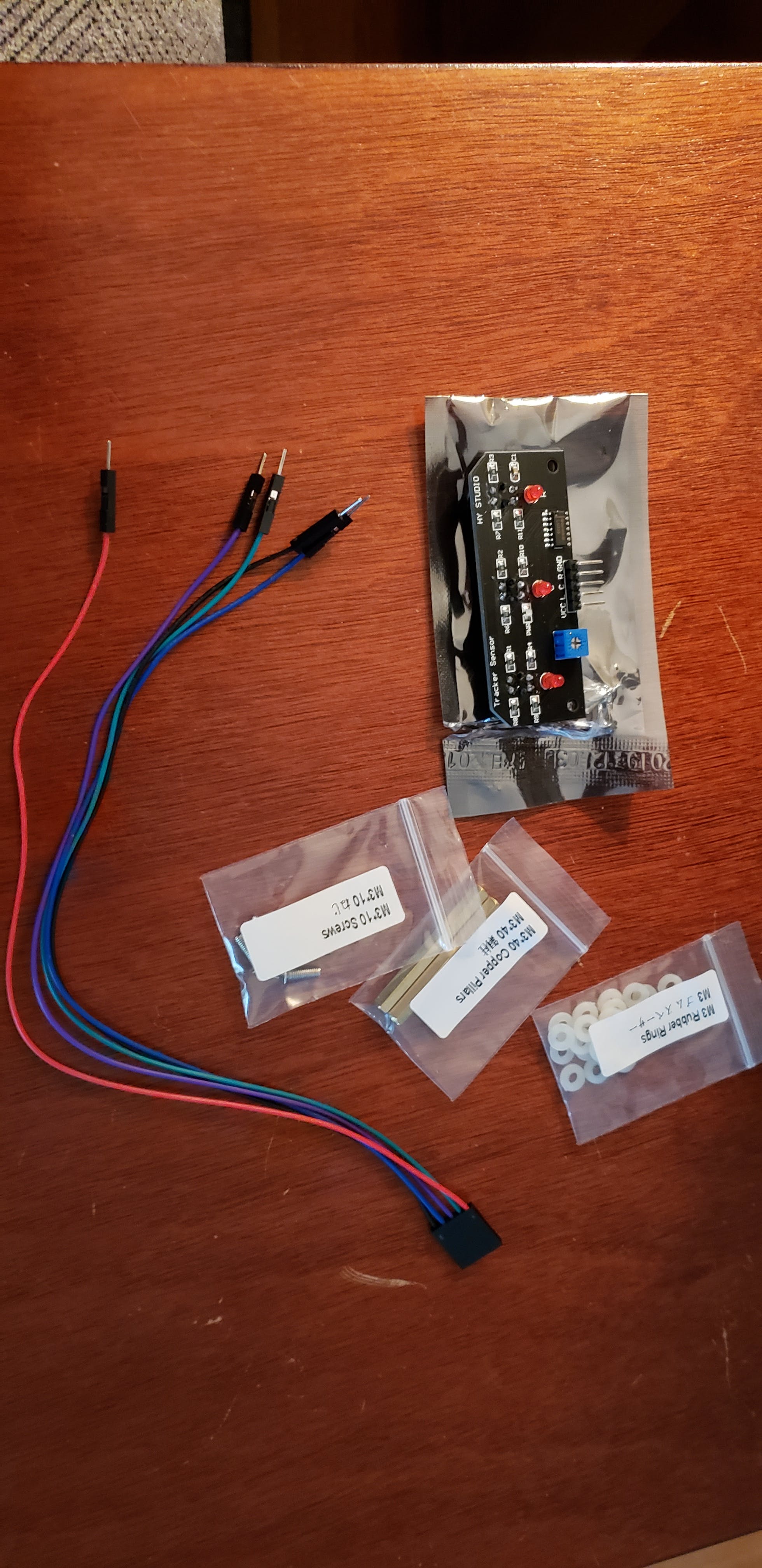
7. 如果您打算使用本產(chǎn)品的線路跟蹤功能,網(wǎng)頁鏈接適用于五個(gè)單獨(dú)的紅外線路傳感器,“wget”和“文本”鏈接適用于 OSOSYOO ??PiCAR V2.0 套件中包含的五個(gè)紅外線路傳感器同樣,但 Mecanum 機(jī)器人套件包括一個(gè)三個(gè) IR 傳感器模塊,因此您需要修改該代碼。
8. 最重要的是,我需要在我的后兩個(gè)電機(jī)上的 2 針電機(jī)連接器上反轉(zhuǎn)電機(jī)電源連接,因?yàn)樗须姍C(jī)的接線極性相同,但在 4 輪機(jī)器人上,前電機(jī)從后部反向安裝,因此 RED和黑線需要交換。這是因?yàn)?Osoyoo L298N Motor Pi 模塊的 K1 和 K2 端口連接在一起,而 K3 和 K4 端口連接在一起。“為什么!!!!!” (我拼命地嘗試用代碼糾正這個(gè)問題,但發(fā)現(xiàn)無論我嘗試什么,兩個(gè)電機(jī)都會彼此相反地旋轉(zhuǎn))。僅當(dāng)使用一個(gè) L298N 模塊時(shí)才需要更改接線。如果使用兩個(gè) Motor-X 模塊,那么您可以獨(dú)立交換代碼中的方向/旋轉(zhuǎn)。
9. 我遇到了 Osoyoo L298N Motor Pi 模塊的問題,它通過兩個(gè) 18650 3.7 伏電池組為 Raspberry Pi 提供 5.1 伏和 2.5 安培的電源。Mecanum 套件隨附的 Motor-X L298N 專為 Arduino 設(shè)計(jì),因此其輸出不會被調(diào)節(jié)至 Raspberry Pi 規(guī)格。我有一個(gè) Motor Pi 和 Motor-X 模塊,當(dāng)開機(jī)時(shí),它會在啟動時(shí)立即開始旋轉(zhuǎn)左后電機(jī)。這最初被認(rèn)為是接線問題,我的 Raspberry Pi 上的 GPIO 引腳掛起,或者代碼錯(cuò)誤,但是當(dāng)代碼運(yùn)行時(shí)電機(jī)會正常工作。它會根據(jù)代碼請求啟動/停止/并改變旋轉(zhuǎn)方向,但在空閑狀態(tài)下它被啟用為高電平。因?yàn)槲屹I了兩個(gè) Motor Pi 模塊,我可以把它換掉,問題就消失了。
現(xiàn)在我的構(gòu)建經(jīng)驗(yàn):
A. 研究和訂購
我一直在監(jiān)控 Mecanum 套件或車輪,但成本太高。該套件的成本波動 +/- 20.00 美元。Osoyoo 提供了兩種類似的套件,一種具有塑料輪和基本驅(qū)動直流電機(jī),另一種具有橡膠輪和帶霍爾傳感器的齒輪電機(jī)(但未使用霍爾傳感器)。甚至還有一個(gè)沒有電子設(shè)備的精簡版。注意套件描述、特性和功能。
塑料輪子
" https://www.amazon.com/dp/B0822KGXBJ/ref=as_li_ss_tl?ref=myi_title_dp&ref_=nav_ya_signin&_encoding=UTF8&&linkCode=ll1&tag=osoyoo-20&linkId=a0527e51692344d5e271a81206c5bef8&language=en_US " $69.99
Arduino 橡膠輪
“ https://www.amazon.com/OSOYOO-Omni-directinal-Controlled-Educational-Mechanical/dp/B0821DV5GJ/ref=pd_rhf_se_p_img_2?_encoding=UTF8&psc=1&refRID=VGH3D0SSAECZ3QXM9MJF ” 116.00 美元。
基礎(chǔ)平臺
“ https://www.amazon.com/OSOYOO-Robotic-Mecanum-Platform-Raspberry/dp/B07WZJYVB5/ref=pd_rhf_se_p_img_7?_encoding=UTF8&psc=1&refRID=RYPA66MSTEWV8RCDX6CS ”,現(xiàn)價(jià) 79.99 美元。
B. 文檔控制 - 為金屬底盤 Mecanum 機(jī)器人選擇文檔
在查看了 Web 鏈接和文檔后,我確定我最初遵循了錯(cuò)誤的匯編和編碼文檔。我原以為我的套件是使用塑料輪子的 Mars Rover 版本“亞馬遜的描述非常相似”,我很快發(fā)現(xiàn) Arduino Motor 代碼示例與 Metal Mecanum 版本相反。在通過許多電子郵件聯(lián)系 Osoyoo 的支持后,我確定電機(jī)電纜的接線方式不同,因此代碼示例不正確。我還發(fā)現(xiàn)不同的 Osoyoo 工程師編寫了每個(gè)開發(fā)課程,因此功能命名模式是不同的,并且在構(gòu)建套件和添加功能時(shí)沒有擴(kuò)展。
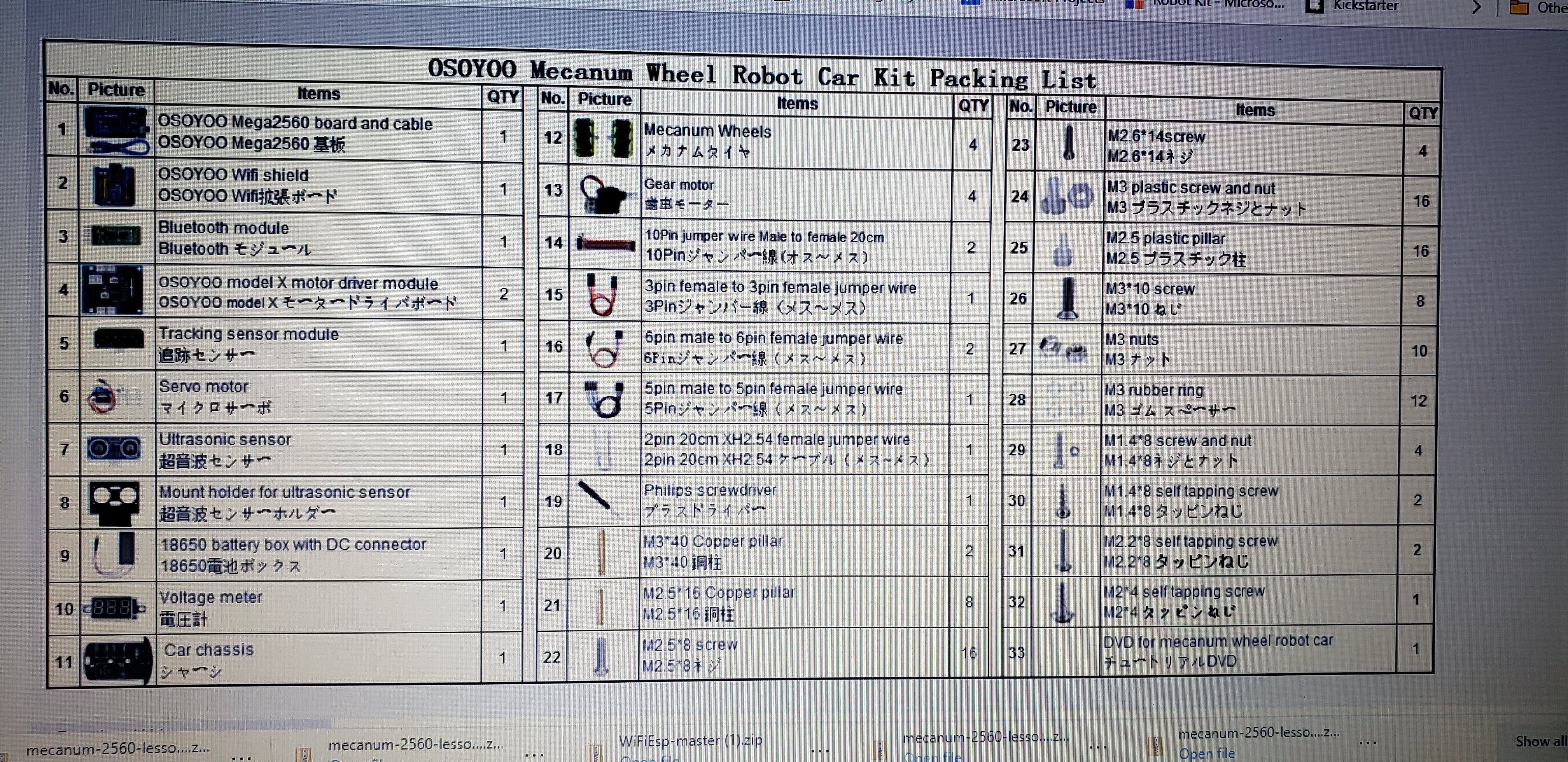
C. 開箱和組裝
1. 收集每個(gè)組裝步驟所需的硬件 - 帶電機(jī)支架的機(jī)器人底座
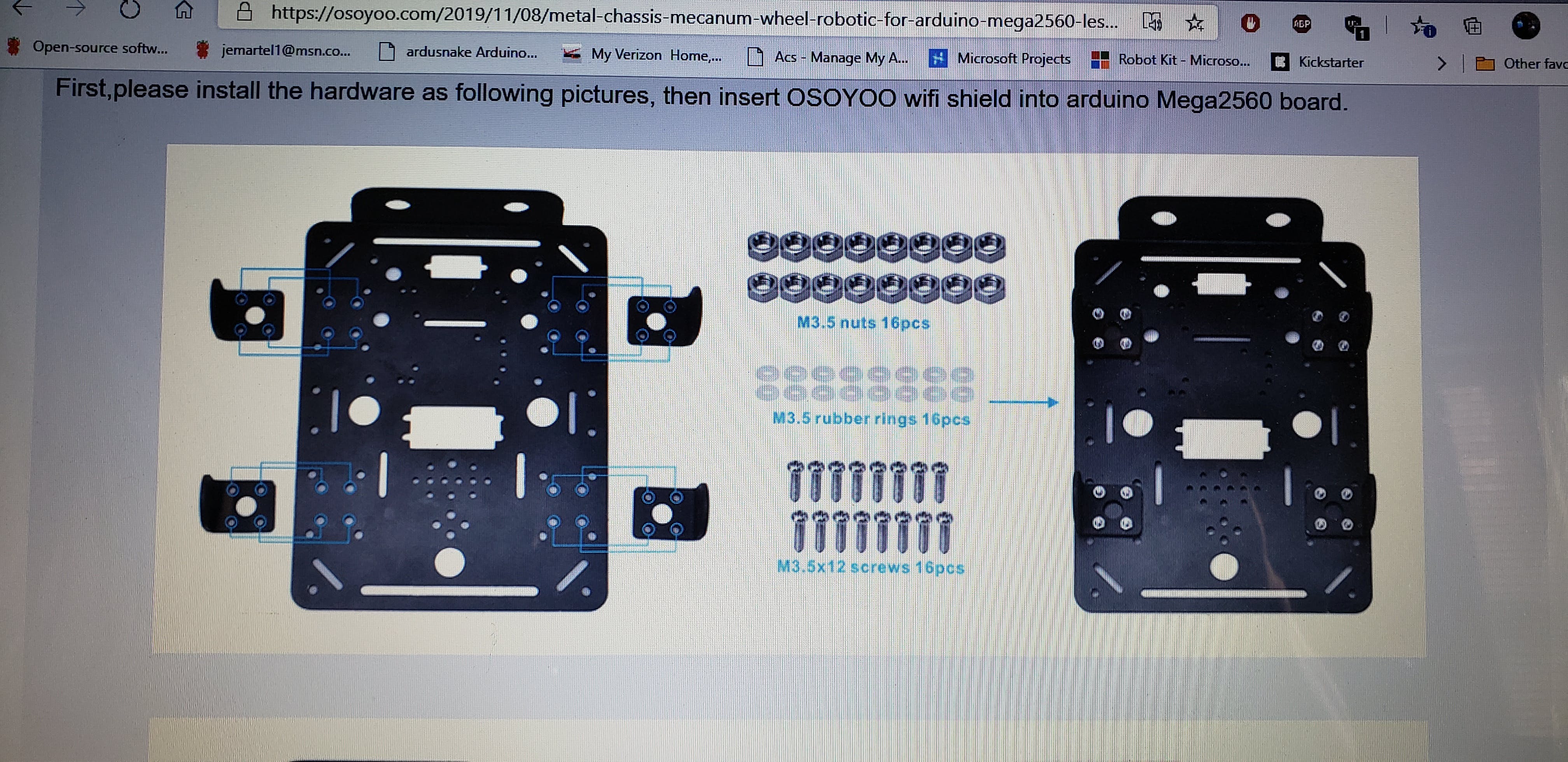
2. 將電機(jī)支架連接到機(jī)器人金屬底板

3. 現(xiàn)在連接剩余的三個(gè)電機(jī)支架

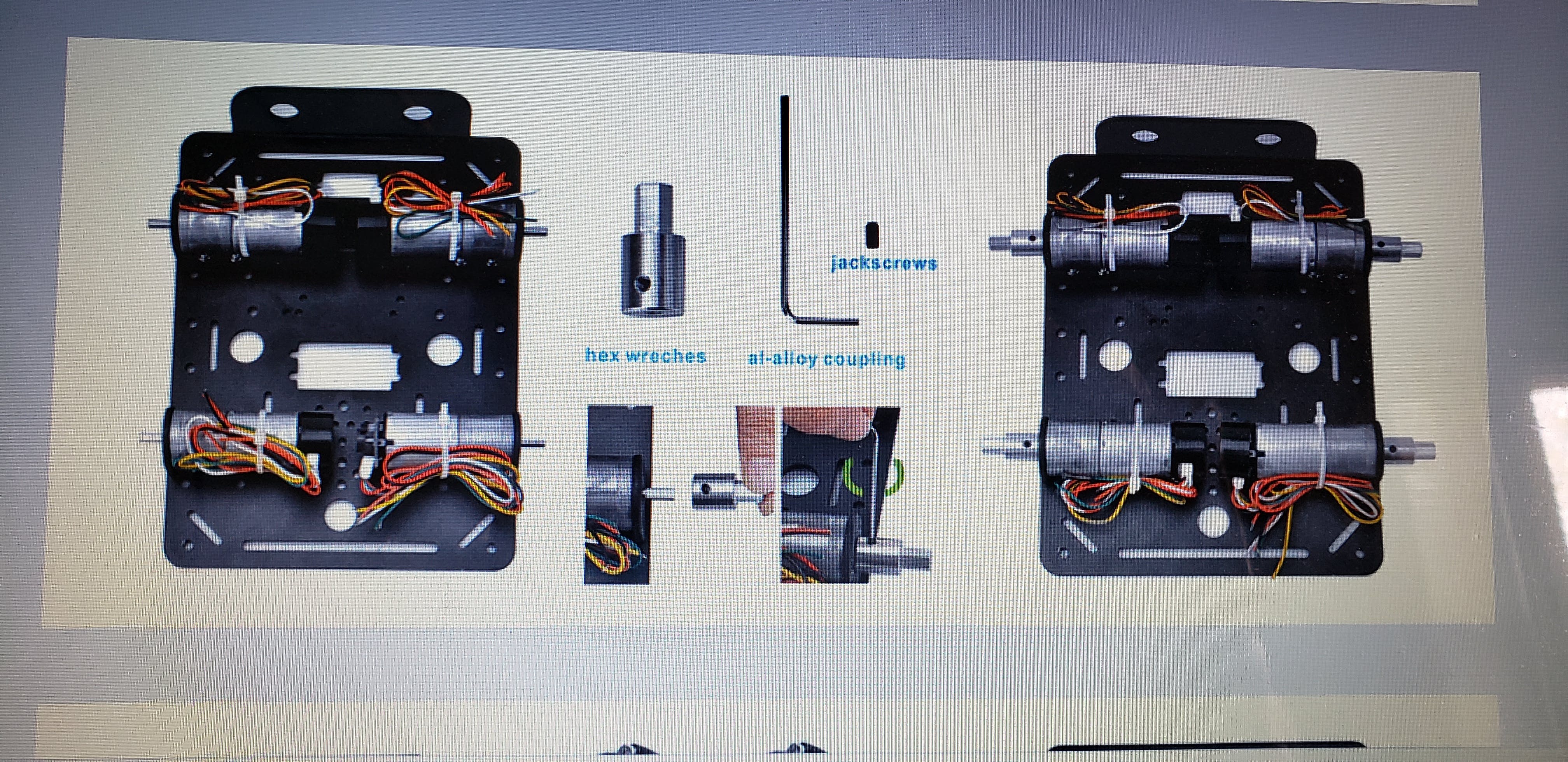
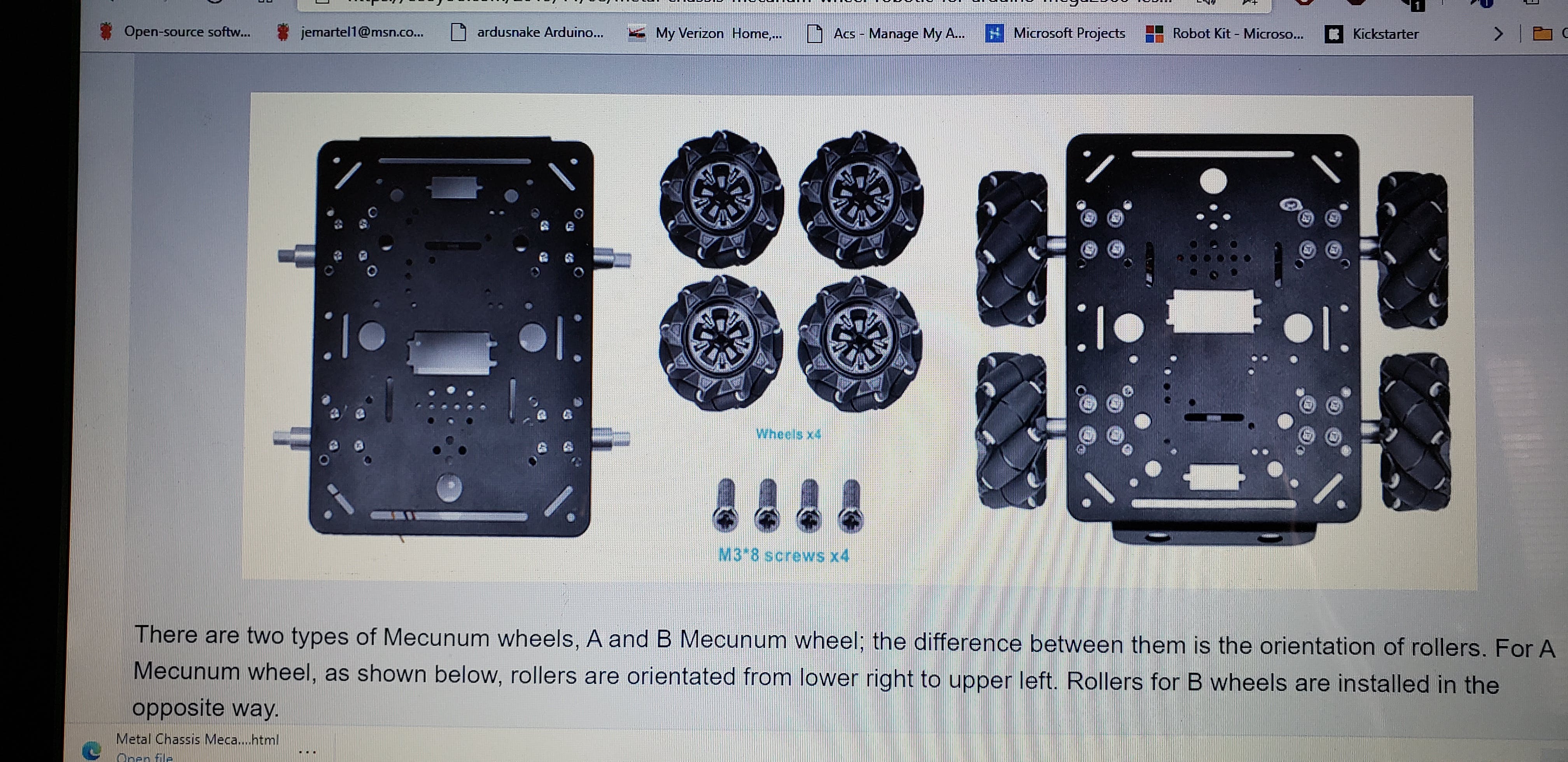
4.收集電機(jī)和車輪的硬件

5.現(xiàn)在連接其他三個(gè)電機(jī)

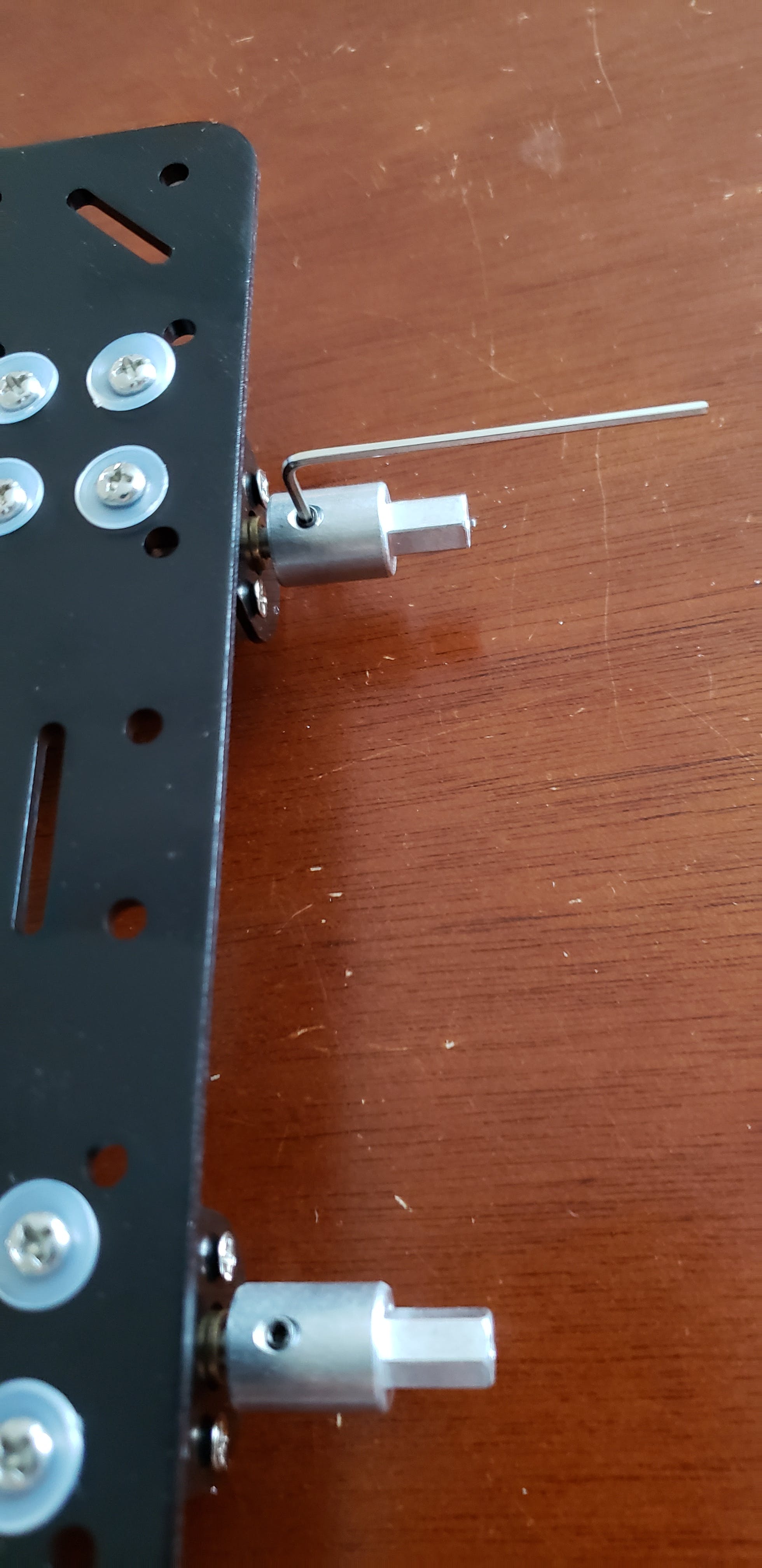
6. 收集輪轂擴(kuò)展適配器的硬件
7. 現(xiàn)在連接其他三個(gè)輪轂
8. 現(xiàn)在安裝輪子
9. 現(xiàn)在布置電子模塊以供支架使用和安裝
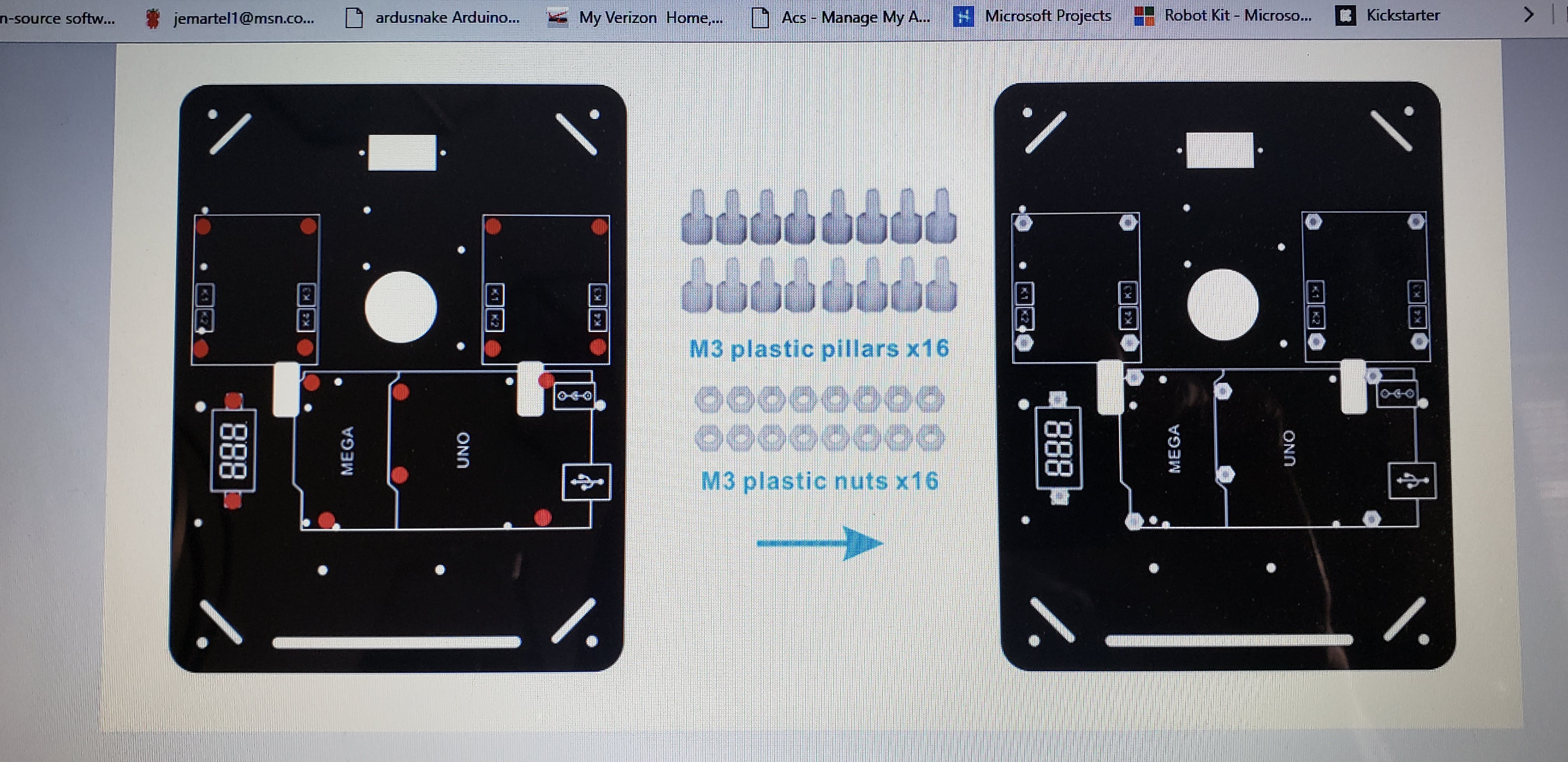
10. 現(xiàn)在用塑料螺絲連接電子設(shè)備和電池座

現(xiàn)在是 2020 年 10 月 28 日;我一直忙于支付白天的工作……但沒有忙于繼續(xù)思考這個(gè)項(xiàng)目和 Raspberry Pi 版本的撰寫完成。
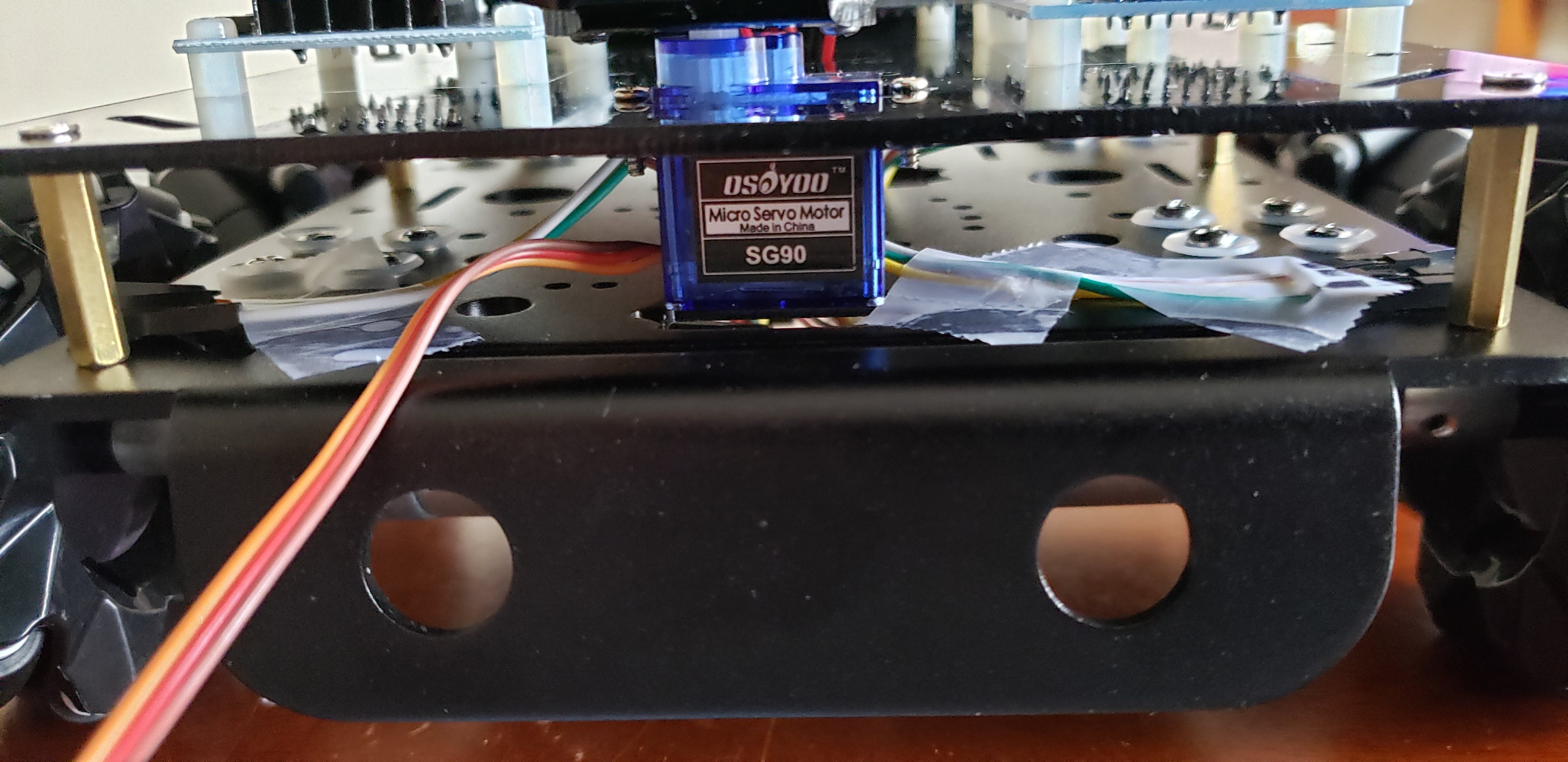
11. 安裝超聲波傳感器伺服和頂板支架

12. 超聲波傳感器和支架的組裝。

13. 將電機(jī)和硬件連接到互連板
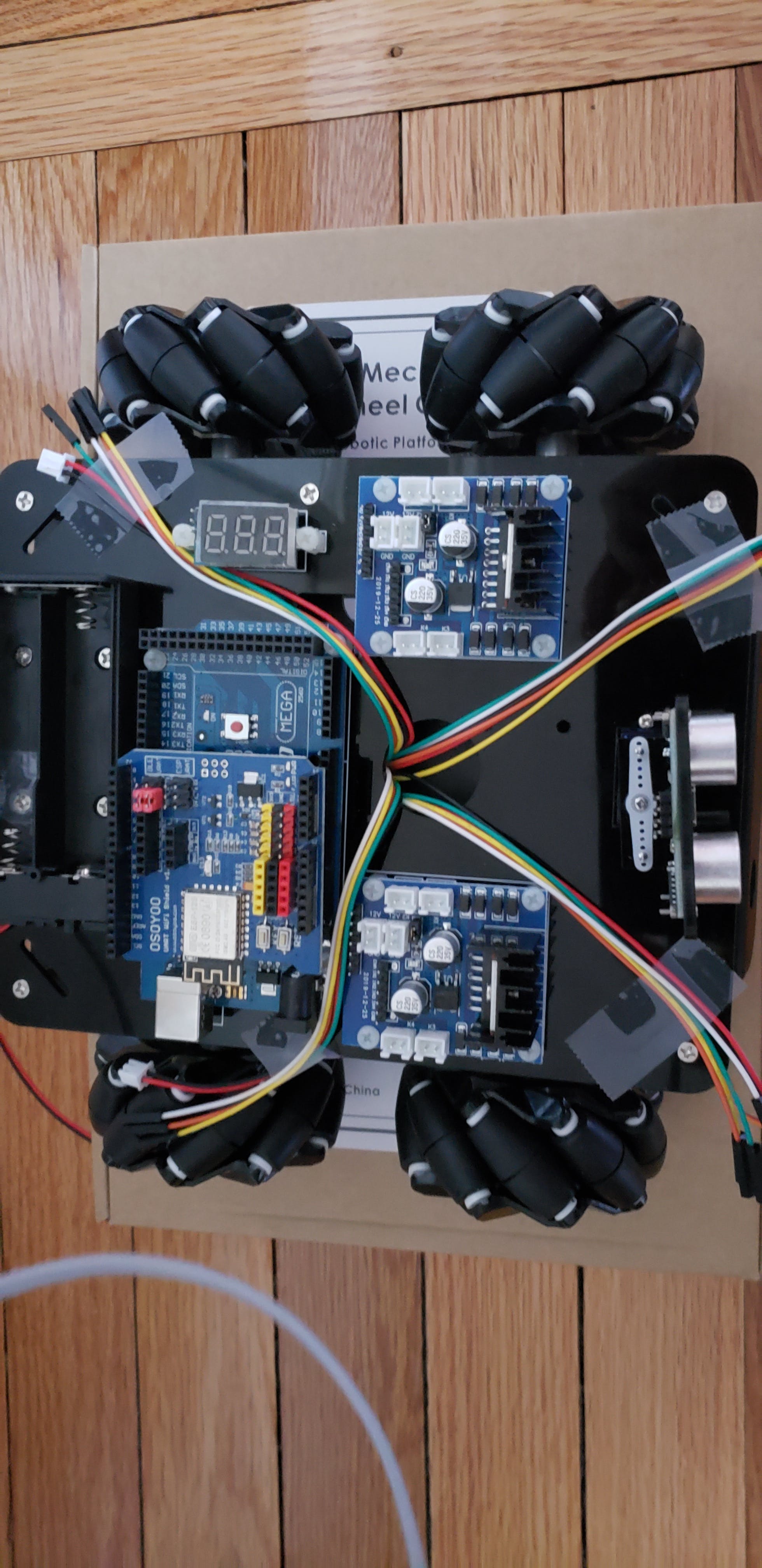
14.電機(jī)控制與UNO WIFI板互連
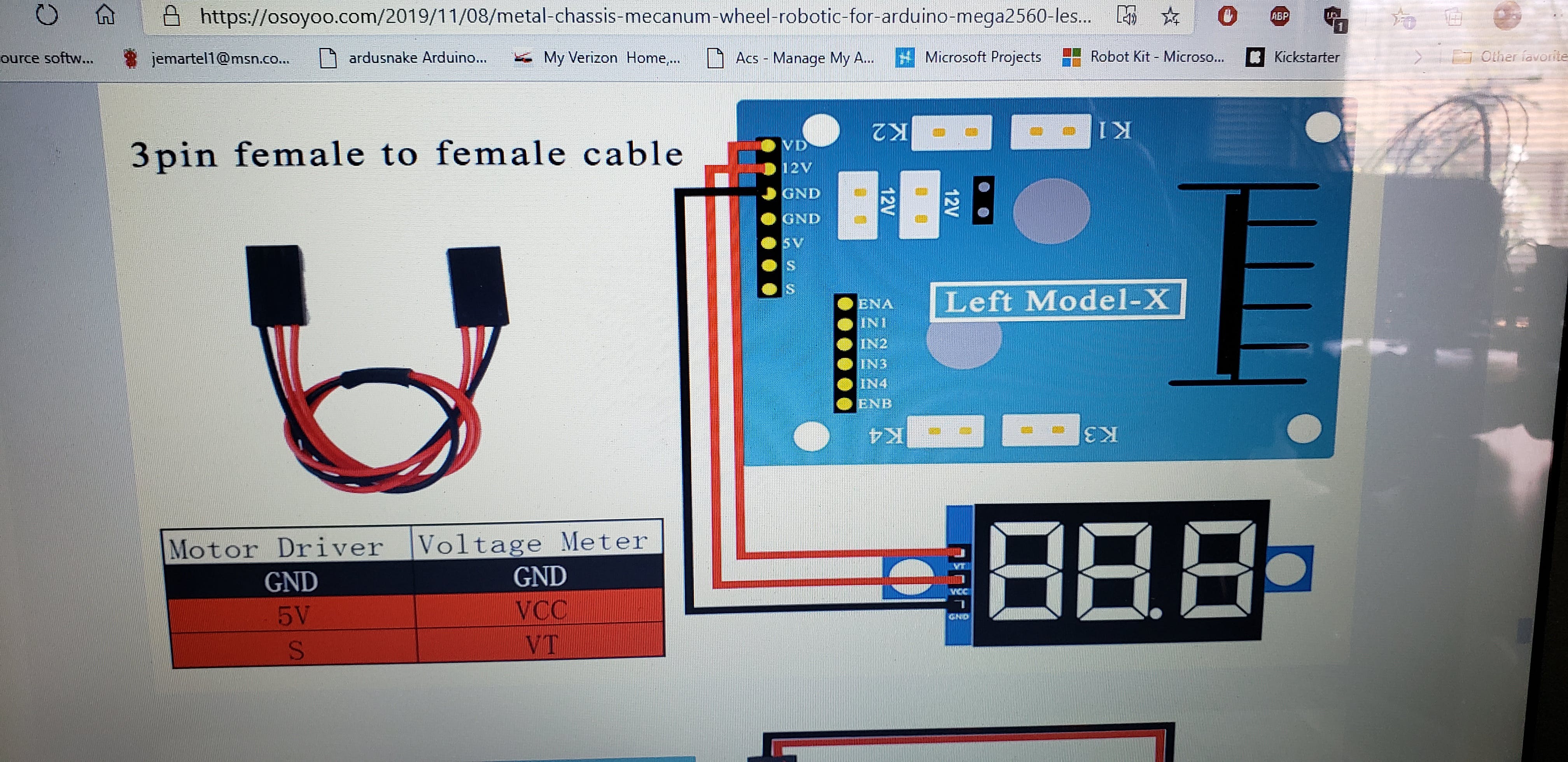
15. 電壓表和電池互連
16.超聲波傳感器與伺服互連
17. 線路跟隨傳感器安裝和互連
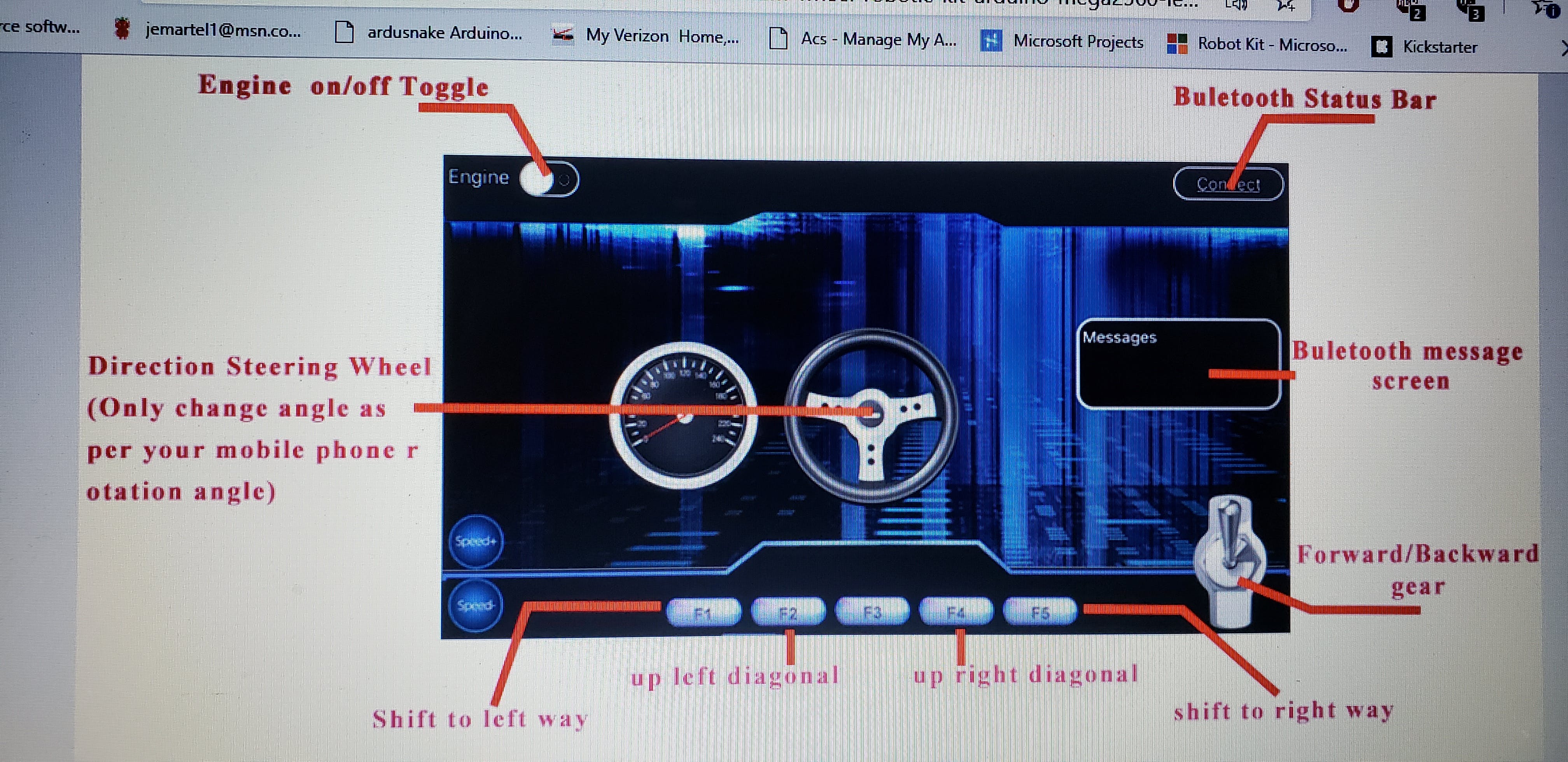
18.藍(lán)牙連接或WIFI使用......你決定

19. 下載 Android 應(yīng)用程序,讓樂趣開始
。
?
- 使用Raspberry PI和open CV進(jìn)行圖像處理
- 使用Raspberry Pi和BluPants進(jìn)行編碼
- 使用Raspberry Pi和Arduino實(shí)現(xiàn)Web控制的LED動畫
- 通過USB對Raspberry Pi進(jìn)行編程
- 使用Raspberry Pi進(jìn)行汽車診斷
- 將Arduino和Raspberry Pi硬件設(shè)備與Minecraft游戲連接
- 在Raspberry Pi上使用Arduino MKR ENV Shield
- 使用Raspberry Pi和Arduino進(jìn)行花卉監(jiān)測
- 用Raspberry Pi和Arduino Micro制作的虛擬窺視孔
- 使用Raspberry Pi或Arduino:DIY LED矩陣彩燈
- Raspberry Pi和Arduino上的手寫數(shù)字識別
- 《愛上Raspberry Pi》中譯版-電子書籍.pdf 0次下載
- Easy Build:如何通過 Raspberry Pi 項(xiàng)目實(shí)現(xiàn)直線平臺 13次下載
- Raspberry Pi Home Automation wit 0次下載
- 愛上Raspberry Pi 0次下載
- 基于Raspberry Pi 5的蜂窩物聯(lián)網(wǎng)項(xiàng)目 1027次閱讀
- 使用Raspberry Pi Pico W和MicroPython開發(fā)物聯(lián)網(wǎng)應(yīng)用 1673次閱讀
- 用于測試項(xiàng)目的4個(gè)最佳樹莓派Raspberry Pi模擬器 5985次閱讀
- 如何通過Raspberry Pi設(shè)置CE電流監(jiān)視器 2124次閱讀
- 樹莓派之路:Arduino和Raspberry-Pi 1815次閱讀
- 基于樹莓派產(chǎn)品 Raspberry Pi微控制器板的優(yōu)缺點(diǎn) 2710次閱讀
- 基于Raspberry Pi Pico開發(fā)先進(jìn)的家庭自動化系統(tǒng) 2850次閱讀
- 基于FONA通過UART與Raspberry Pi進(jìn)行通訊的方案介紹 2122次閱讀
- dfrobotDevastator履帶機(jī)器人移動平臺簡介 1515次閱讀
- 微雪電子ZeroW| Raspberry Pi ZeroW主板簡介 2429次閱讀
- 微雪電子Raspberry Pi 3 Model主板簡介 2873次閱讀
- 微雪電子Raspberry Pi 3 Model擴(kuò)展板簡介 1512次閱讀
- 利用Raspberry Pi構(gòu)建存儲和虛擬化時(shí)間序列數(shù)據(jù) 884次閱讀
- 一文了解Raspberry Pi 4各項(xiàng)性能跑分 2.9w次閱讀
- 視覺享受!用Raspberry Pi實(shí)現(xiàn)圣誕樹燈光秀 8127次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論