 電子發燒友App
電子發燒友App













 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
描述
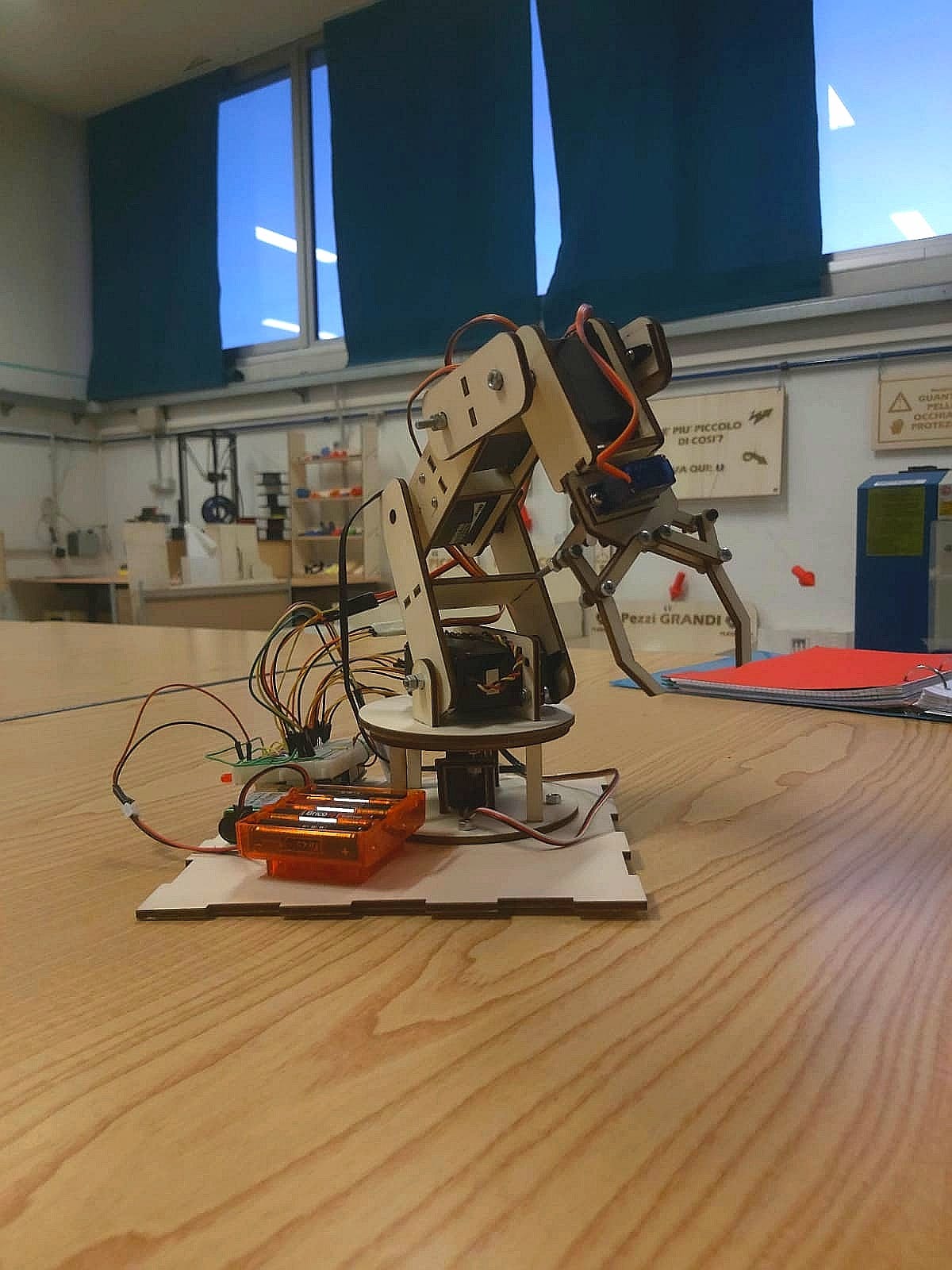
Bracc.ino 是一個簡單的關節臂,由 6 個伺服電機組成,由 Arduino 手柄通過藍牙控制。它是作為一個學校項目誕生的,其目的是模擬工業機器人。經過不同的嘗試,我們可以找到正確的前進方式,我們可以移動機器人。
為了創建最終原型,我們使用不同的生產方法,例如使用激光切割機制作結構,使用 3D 打印機制作銷釘、夾具和底座。
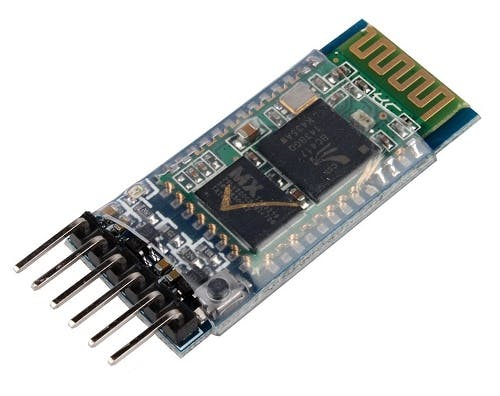
手臂運動由 Arduino 板控制。我們可以使用兩個板之間的藍牙通信發送有關要執行哪個動作的信息。我們決定使用傳感器 HC-05 來執行此操作。
藍牙通訊
藍牙通信包括通過射頻發送和接收信息。在不需要電線的情況下發送數據可能很有用。所以我們決定找到一種方法來為我們的機械臂創建一個游戲手柄。我們發現使用 Arduino 是可能的。使用藍牙模塊 HC-05,我們可以通過設備接收數據,但是,對傳感器進行編程,我們也可以將數據發送到另一個 HC-05。所以我們找到了一種方法來編程和更改模塊配置。向對方發送數據的模塊稱為 MASTER,而接收器則稱為 SLAVE。所以這兩種配置有些不同,但有一些共同點。基本上,要點是:
- 將兩個 Arduino 與 HC-05 傳感器連接,為 EN 引腳(或鍵)供電 5V。然后上傳一個空草圖并打開串行通信。為了簡化程序,我們可以使用兩個不同的 Arduino IDE 窗口同時連接兩個板。
- 現在在串口監視器上寫一些文字,我們可以更改藍牙配置。
從配置:serialmonitorsequence
- 寫“AT” ,直到回復“OK”。
- AT+UART=38400。它設置波特率,藍牙為 38400 波特。
- AT+角色=0。將 HC-05 設置為從屬模式。
- AT+CMODE=0。它僅用于連接配對設備
- AT+PSWD=1234。設置密碼。對主傳感器也使用相同的方法很重要。
主機配置:串口監控序列
- 寫“AT”,直到回復“OK”。
- AT+UART=38400。它設置波特率,藍牙為 38400 波特。
- AT+角色=1。將 HC-05 設置為主模式。
- AT+RMAAD。清除之前配對的設備。
- AT+復位。重置模塊。
- AT+CMODE=0。
- AT+INQM=0、5、9。
- AT+初始化。
- AT+查詢。最后三個命令幫助我們搜索從模塊。最后一條命令返回模塊附近設備的地址。
- 現在我們必須復制正確的地址。如果我們有多個,我們可以控制正確的設備在“AT+RNAME=<地址>之后粘貼地址。使用逗號而不是冒號很重要。
- 找到正確的設備,寫“AT+PAIR= , 9”
- AT+BIND=<地址>。
- AT+CMODE=1。
- AT+LINK=<地址>
- 如果我們收到“OK”的回復,我們就成功配對了兩個藍牙模塊。
有關配對過程的更多信息,請訪問鏈接:
http://www.martyncurrey.com/connecting-2-arduinos-by-bluetooth-using-a-hc-05-and-a-hc-06-pair-bind-and-link/
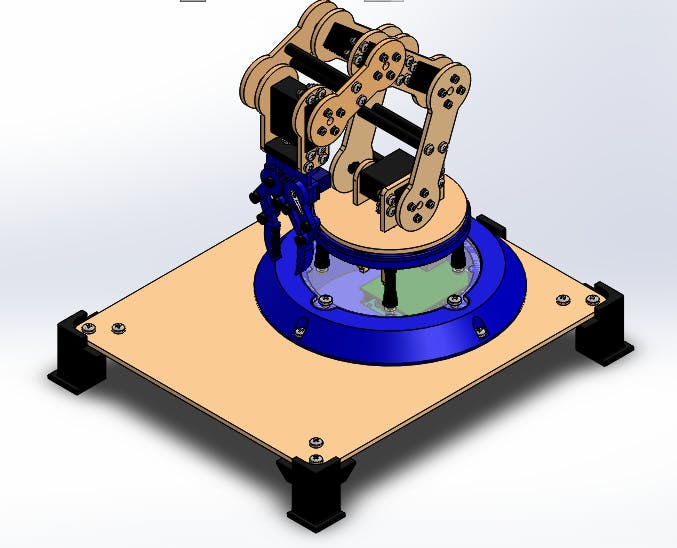
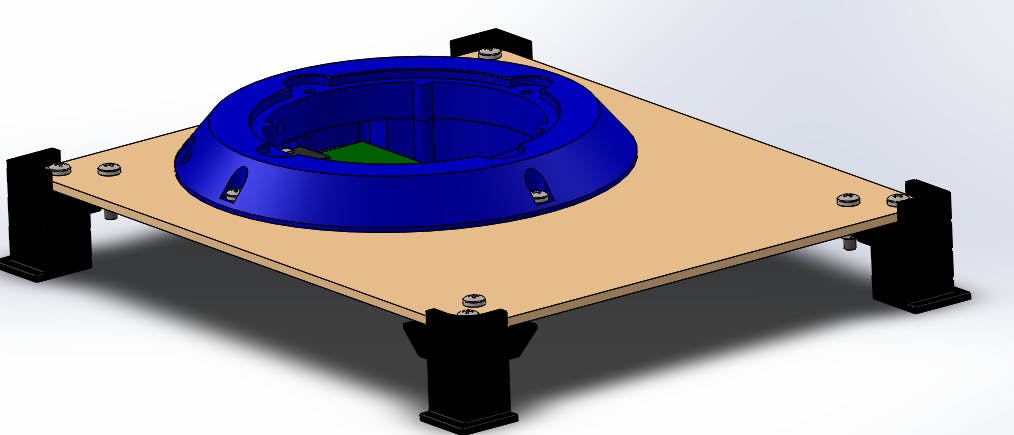
結構說明
學校給了我們很多機會來學習如何使用激光切割和 3D 打印技術。所以我們能夠創建一個手臂結構,開始在 3D 軟件上繪制它,比如“SolidWorks”。然后,出于美觀的原因,我們選擇使用激光切割機生產結構部件,并使用 3D 打印機制作夾具和底座。操縱桿也是由 3d 打印機創建的。
3D 文件可以在 GrabCAD 平臺上的鏈接中輕松找到:
https://grabcad.com/library/bracc-ino-1
手柄

伺服
使用伺服電機移動手臂的關節。它們易于使用,帶有 Arduino 庫,我們可以非常輕松地控制電機角度。但是為了提升結構,我們必須使用一些不同的伺服,具有更高的失速扭矩。伺服MG996R,幫助我們抬起所有的手臂。此外,這種伺服是數字類型的,也就是說它們比普通的更準確。我們還必須使用 庫而不是普通的 庫。前一個有更多的功能,可以幫助我們模擬更流暢的動作。它還具有控制舵機速度和以異步方式移動它們的功能。
該庫可以在以下鏈接中找到:
https://github.com/netlabtoolkit/VarSpeedServo

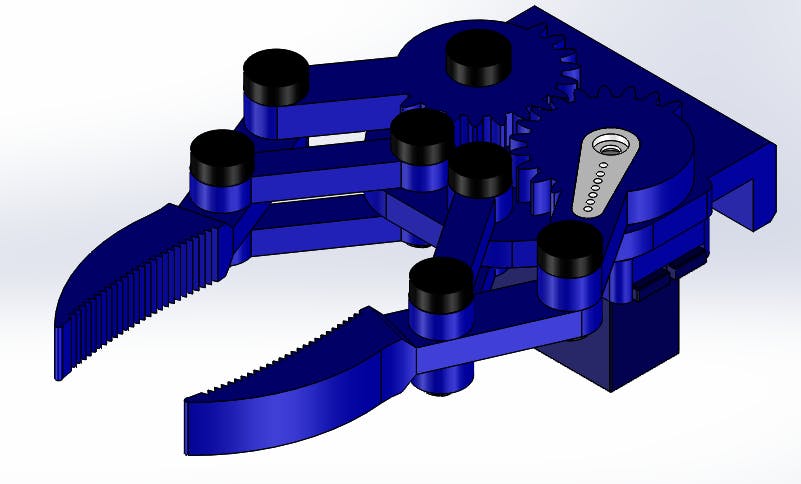
抓手
機器人手臂工具現在是一個簡單的抓手,可以懸掛小物體并移動它們。它由我們設計并由 3d 打印機實現。SG90 伺服電機旋轉一個齒輪,該齒輪移動另一個并打開或關閉爪子。
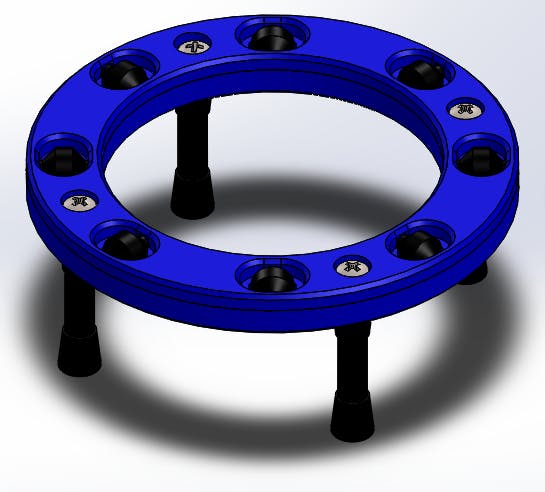
基礎軸承
另一個有用的組件是基礎軸承。它就像一個輔助滾珠軸承,但它是完全 3D 打印的。它有兩個圓環,里面有一些滾子,它們具有特殊的形狀,可以毫無問題地滑動。主要功能是幫助底座旋轉,避免在木盤上爬行。
命令塊-基礎
在手臂下方有一個塊,里面有機器人的所有電路和電池。它包含 Arduino 板、PCB 和充電電池。該底座手杖可以從地面拆卸,并且可以作為模塊化安裝到其他設備上。
電路:手臂
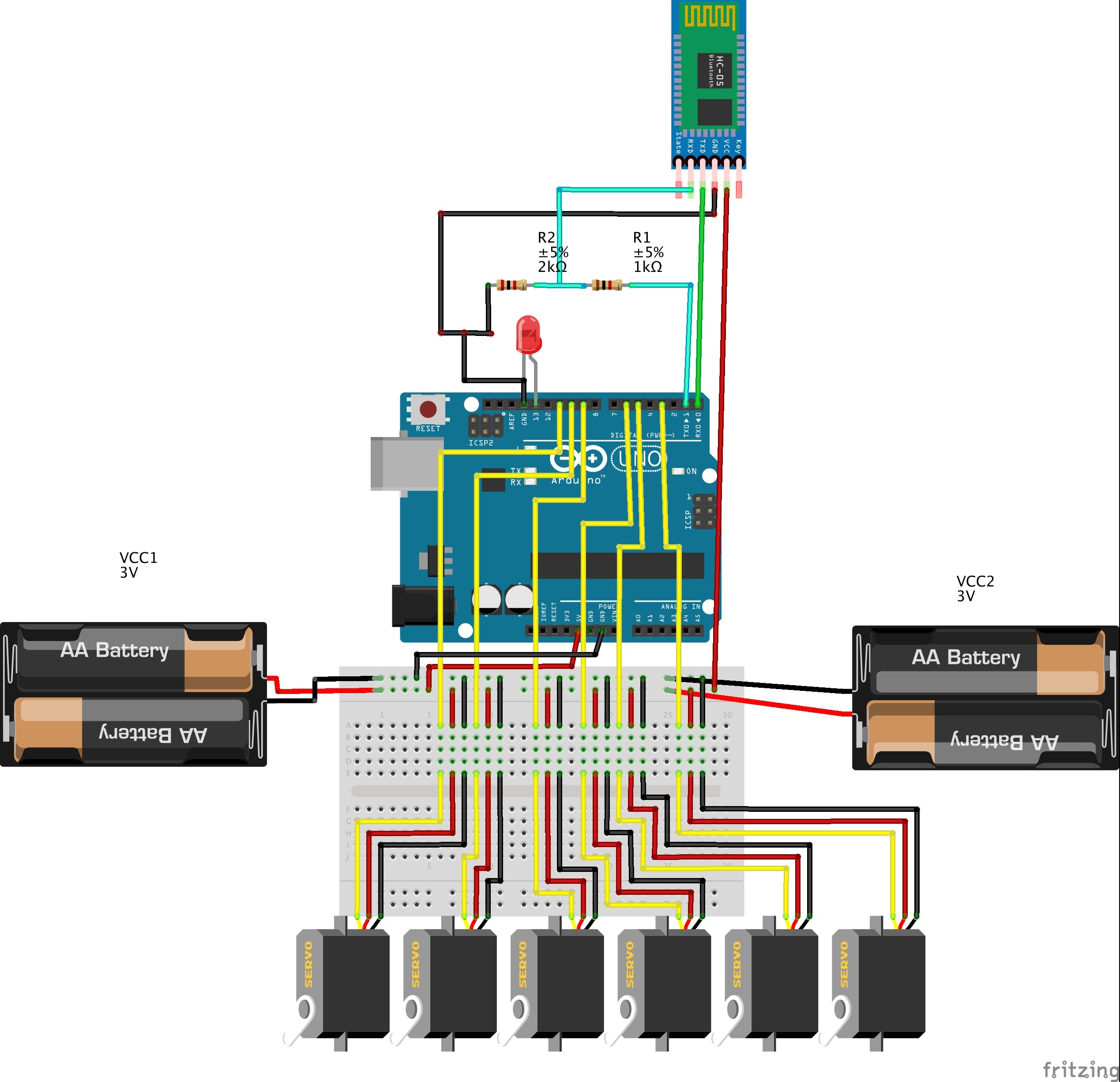
手臂電路由與HC-05的 bluettorh 接線組成,并將每個 Servo 連接到 GND、6V 和 PWM 引腳。伺服系統具有不同的電源線,因為它們具有更高的扭矩和更高的供應。
電路:手柄
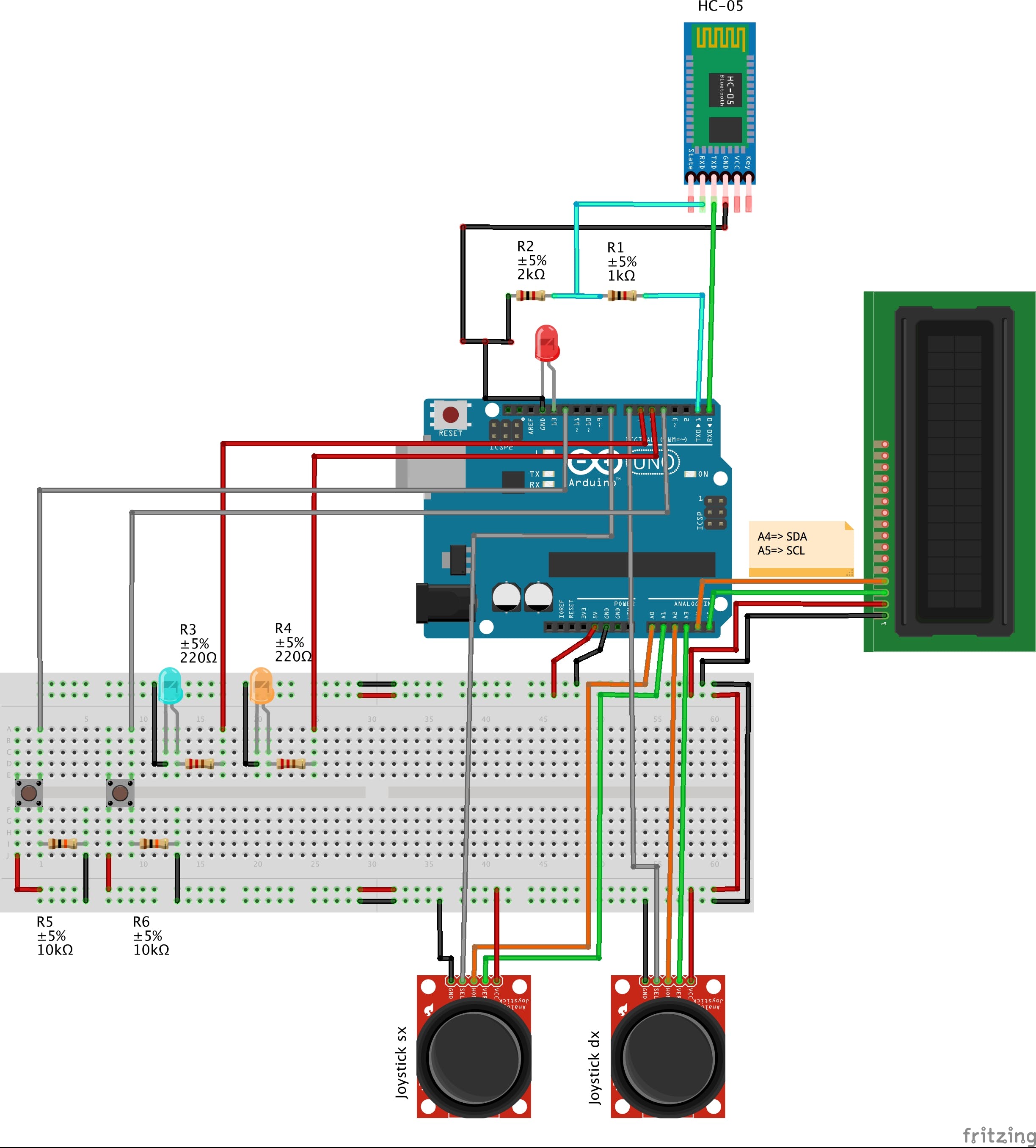
操縱桿電路由相同的藍牙接線組成,增加了兩個操縱桿、兩個按鈕和一個LCD。
操縱桿由兩個微調器組成,每個微調器的值由模擬 IN 引腳讀取。按鈕也是如此,但我們必須使用數字引腳來讀取它是 HIGH(按下)還是 LOW(未按下)。
我們連接到 I2C 模塊的 LCD 顯示器減少了連接數量,打印了我們移動的伺服方式及其角度。為了使用它,我們找到了一個名為 的特定庫,可以在此處下載:
https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
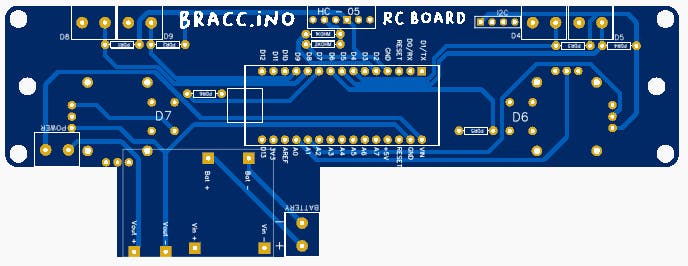
印刷電路板
由于飛線和電路不清晰的問題,我們想畫一個PCB電路,像屏蔽一樣連接到Arduino Board。我們使用“EasyDA”網站繪制它們,并通過 JLC 網站訂購零件。這樣,電路更清晰,更小,使用更舒適。
代碼功能
對于編程,我們使用 Arduino IDE 軟件,它使用一種非常簡單的編程語言。我們有兩種不同的代碼,一種用于操縱桿 Arduino,另一種用于 Arm 運動。
代碼的主要功能和動作在后續流程圖中進行了說明,以便于理解。
手柄
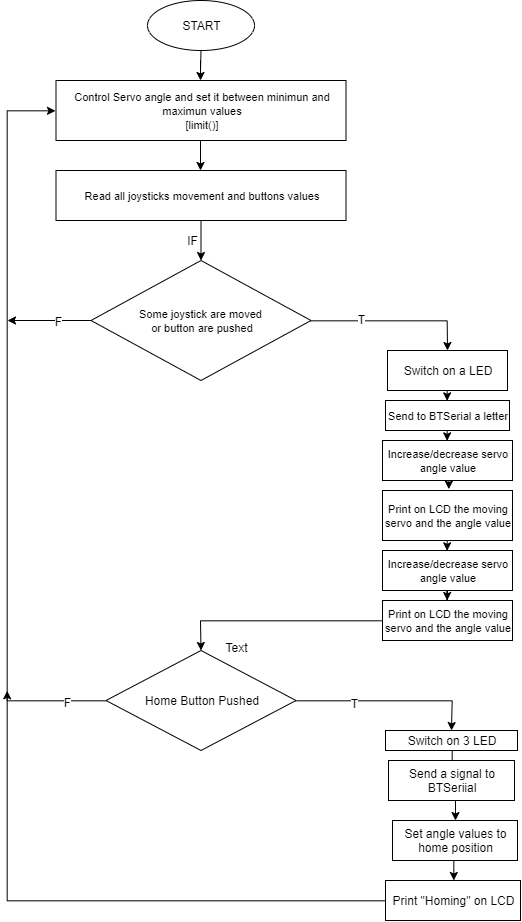
對于發送命令,我們創建了一個代碼列表,由不同的字母組成,表示不同的東西。每個代碼都與一個字母或數字相匹配,通過藍牙通信發送到手臂。
在這兩個代碼中都有一個“limit()”空白,用于控制伺服角度。如果值大于最大值或小于最小值,則角度返回極限值。最大值和最小值是在第一次裝配時設置測試伺服電機的,它們可以很容易地改變,修改代碼開頭的變量。
手臂
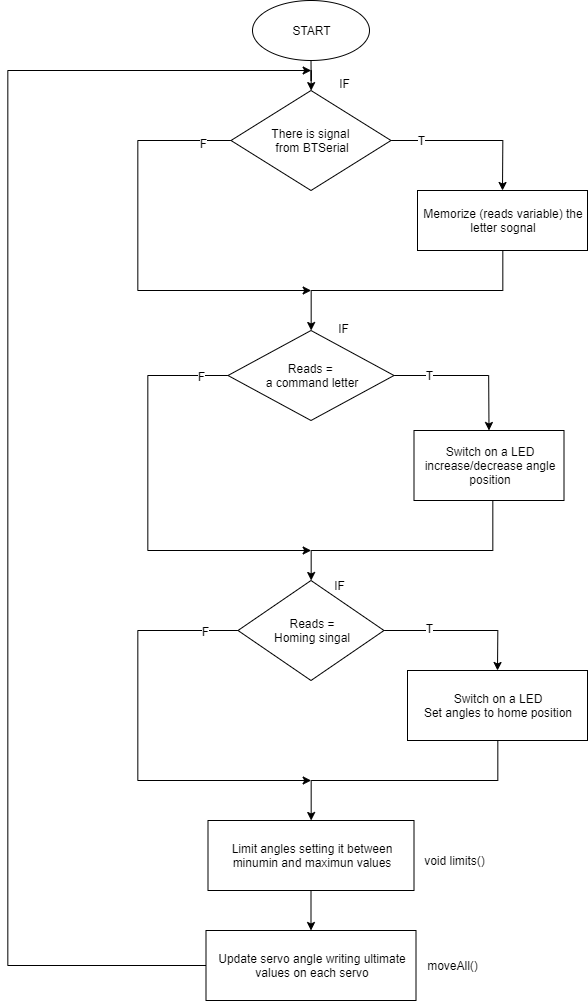
在代碼的開頭,藍牙模塊搜索數據,如果收到信息,它會修改接收到的字母中的“讀取”變量,對應一個動作。
此代碼還具有用于控制伺服角度的“限制無效”。
在代碼的 and 處有一個 moveAll() void。我們選擇使用這個函數而不是在“if”函數中更新伺服角度,因為這樣每次循環開始/結束時,伺服角度都會更新并且電機保持張力。
手臂有兩種模式;正向模式,逐個移動電機,反向模式,移動所有舵機,計算從點坐標開始的角度。
積分保存功能
手臂有趣功能是積分保存方法。它可以保存手臂位置并按順序回放。在正向模式下,代碼會記住所有舵機的角度值,而在反向模式下,它會記住一個點的坐標。
操縱桿在 LCD 上打印保存了哪個點,并在達到最大點數(實際上是五個,最后加上原點)以及重置內存時發出警報。
反向運動模式
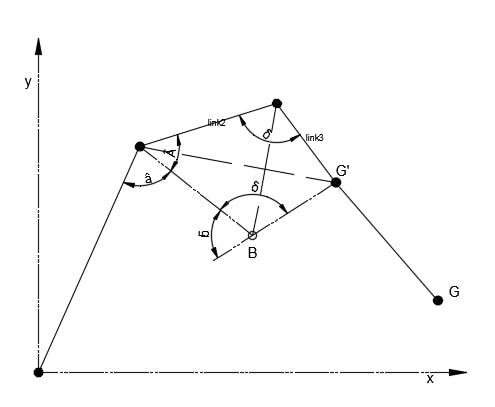
逆模式,而不是直接模式,使用基于逆運動學的算法來查找所有伺服角度。該計算從坐標位置 (x,y) 和夾具點的方向開始。對于這個計算,我們使用幾何方法。事實上,它是基于用 cosin 和 sin 函數構造三角形,我們可以計算所有角度,并將這些值轉換為伺服角度。
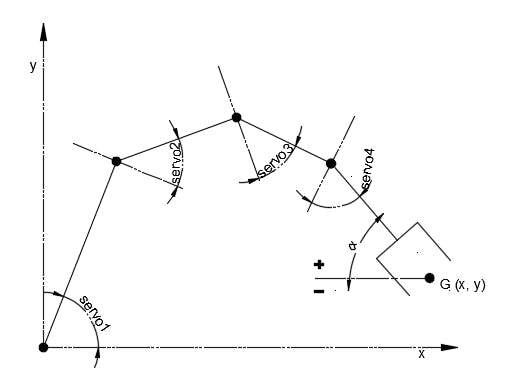
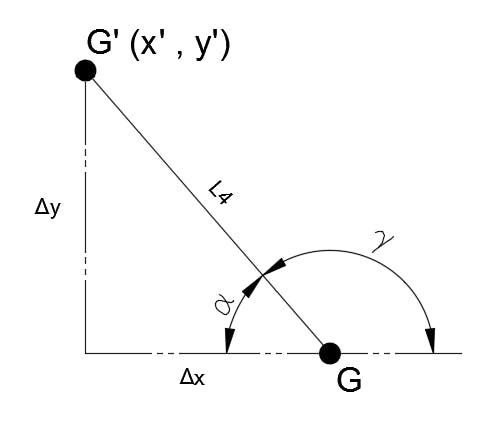
1- G'點翻譯
首先,我們必須將 G 點轉換為 G' 點以簡化逆計算。G 點的 y 也是向上平移 93,以使原點與第一個關節重合。
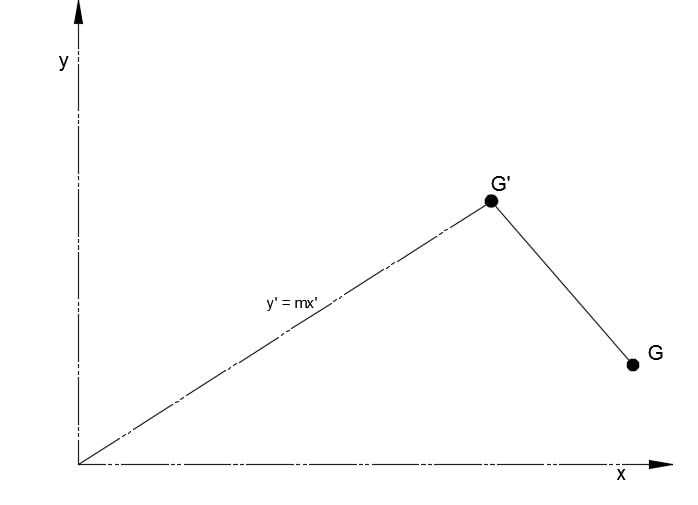
2-直線和斜率_
現在我們可以計算從笛卡爾原點到 G' 點的直線的斜率“m”。
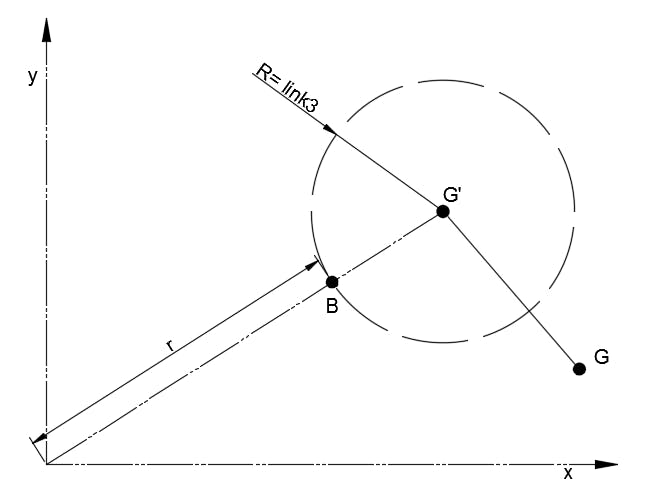
3-圓形交叉口
之后,我們可以畫一個圓心在 G' 和半徑等于鏈接 3 長度的圓。我們知道圓方程,所以我們可以找到直線之間的交點,在 B 點。
簡化這兩個方程,我們可以使用二階求解方法找到 Xb 方程。我們可以通過對圓和直線方程的簡化和收集來找到a、b和c的值。
現在求解二次方程,我們必須取最接近原點的次要值。我們在直線方程中計算 Yb 值代替 Xb。
與使用畢達哥拉斯公式相比,我們計算了原點-B 線的長度。
4-三角角
現在我們可以畫一個三角形,我們知道它的三個邊,分別是“r”長度、鏈接 1 長度和鏈接 2 長度。知道三個邊后,我們可以使用 SSS(side side side)公式找到角度值。
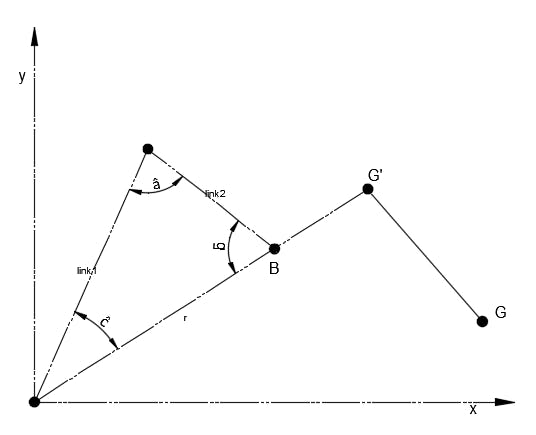
5-三角肌角
之后,我們必須找到最后一個角度,并繪制一個三角形,我們可以找到最后一個。
三角肌由兩個相等的三角形組成,我們知道它們的兩條邊(連桿 2 和連桿 3)和垂直角“delta”。所以計算對角線長度,我們可以計算出A角,我們將完成第二個關節角。
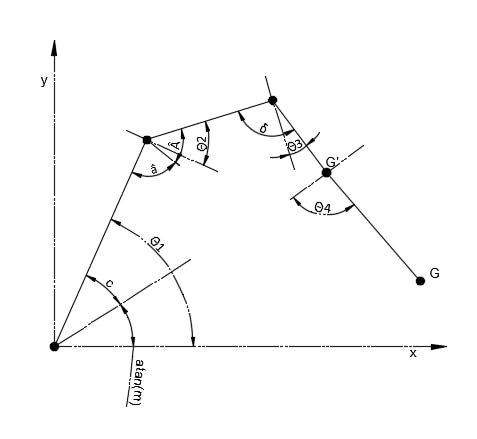
6-查找關節角度
為了將我們的角度轉換為伺服值,我們必須減去和求和我們的角度。
- 對于 Θ1,我們將斜率的角度添加到“c^”角度。
- 對于 Θ2,我們添加“a^”角和 A^ 角并減去 90° 以找到鏈接 1 和鏈接 2 的垂線之間的角度。
- Θ3 是 90° 減去 delta 角。
- Θ4 是角度和“伽馬”角減去 270°。
。
?
?
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 粒子动力机械臂开源构建0次下载
- Python控制的机械臂开源分享3次下载
- 人臂控制机械臂开源4次下载
- 无线机械臂开源硬件0次下载
- 操纵杆控制的机械臂开源硬件1次下载
- 机械臂开源硬件6次下载
- 美光紫外线机械臂开源设计1次下载
- 可记录纸板机械臂开源分享0次下载
- 自动焊接机械臂开源分享1次下载
- 基于YOLOv3等的机械臂药盒智能抓取方法61次下载
- 基于FuzzyP的多臂机器人机械臂控制系统13次下载
- 机械臂手册使用说明17次下载
- 机械臂电路设计开源合集,电机工程师们的杰作47次下载
- 如何使用深度强化学习进行机械臂视觉抓取控制的优化方法概述22次下载
- 机械臂关节驱动组件7次下载
- 使用myCobot 280机械臂结合ROS2系统搭建机械分拣站936次阅读
- 深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的?776次阅读
- 单臂电桥和双臂电桥的优缺点3440次阅读
- 基于六维力传感器的机械臂自动装配应用1493次阅读
- 【开源获奖案例】四轴机械臂控制系统1941次阅读
- 基于深度强化学习的视觉反馈机械臂抓取系统3739次阅读
- dfrobotArduino开发实战-遥控机械臂套装简介2771次阅读
- dfrobotLG-NS机械手夹持器介绍2227次阅读
- MATLAB机械臂的两种路径规划9470次阅读
- 为什么最好的机械臂是7个自由度而不是6个自由度27329次阅读
- 工业机器人和机械手臂有什么区别8162次阅读
- 全球首款轻量级机械臂已经出现了!7931次阅读
- 分享最好的机械臂是7个自由度的原因18565次阅读
- 工业机器人常用材料分析:机械臂材料与常用传感器26673次阅读
- 基于MicroZed的五轴自动化机械臂Dexter3659次阅读
 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論