 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
指揮中心需要知道他們的人員在哪里以及哪里存在危險(xiǎn)并且可能正在接近他們。
無(wú)人機(jī)有機(jī)載傳感器,其數(shù)據(jù)實(shí)時(shí)映射,包括二氧化碳、氧氣、溫度、濕度、氣壓和光照水平。備用接地墊被重新指定為著陸平臺(tái)。在接地墊上創(chuàng)建了使用三種不同顏色塊的著陸標(biāo)記,并教 Pixycam2 識(shí)別和報(bào)告每個(gè)塊的 xy 坐標(biāo)邊界。
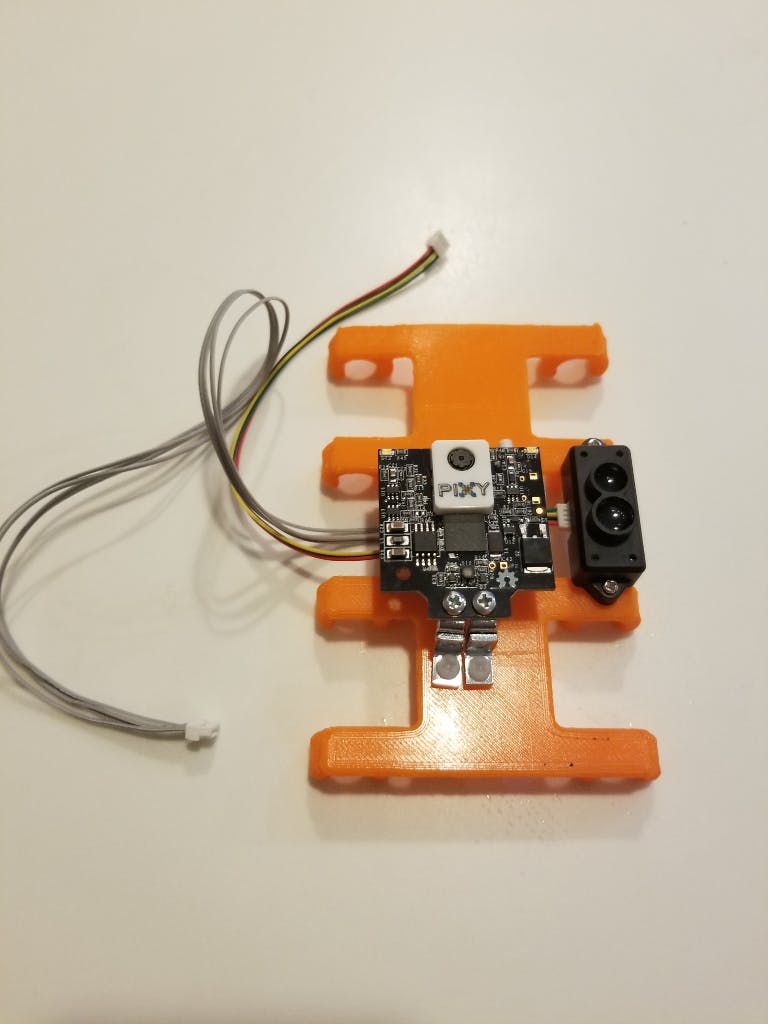
Pixycam2 連接到 FMU66 I2C 連接器。我們想將紅外“激光雷達(dá)”距離傳感器連接到 FMUK66 上的 Telem2 UART,但不幸的是,這個(gè)端口被用作通過(guò) USB 接口連接到 Coral-dev 板的 Mavlink 遠(yuǎn)程端口。因此,我們通過(guò) PL2303 USB 轉(zhuǎn) UART 電纜將向下的距離傳感器連接到 Coral 上的備用 USB 端口,并使用 mavlink 協(xié)議將數(shù)據(jù)發(fā)送到 PX4 固件。
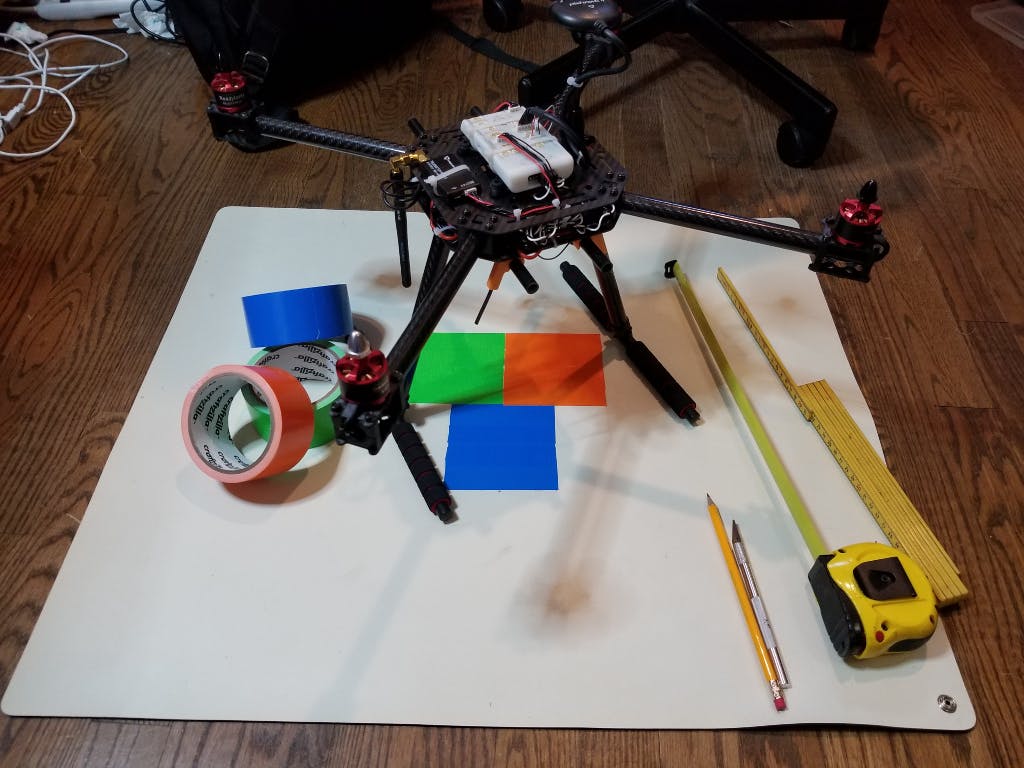
該系統(tǒng)的功能類(lèi)似于 IR-LOCK 著陸系統(tǒng),該系統(tǒng)使用原始的 Pixycam 并剝離了 IR 過(guò)濾器。Pixycam2 協(xié)議與原始的 Pixycam 不同,我們的系統(tǒng)可以識(shí)別多個(gè)物體,以便在著陸時(shí)更精確的 xy 方向,并允許我們創(chuàng)建高度的 z 坐標(biāo)估計(jì)。我們使用備用接地墊作為我們的著陸平臺(tái),并使用彩色膠帶創(chuàng)建三個(gè) 10 厘米見(jiàn)方的方塊。
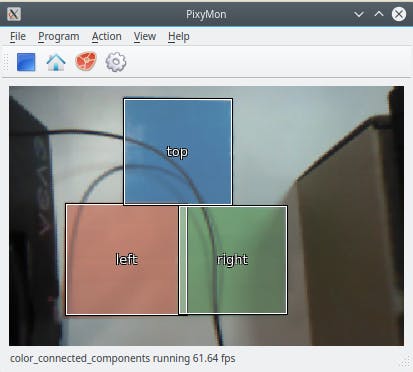
因?yàn)槲覀冎?Pixycam2 識(shí)別的彩色塊的尺寸,所以我們可以將其用作距離標(biāo)記。TFMini“激光雷達(dá)”系統(tǒng)(不是真正的激光雷達(dá),而是一個(gè)飛行時(shí)間紅外傳感器)是多余的,但添加了額外的高度數(shù)據(jù),這些數(shù)據(jù)是我們的 Pixycam2 PX4 驅(qū)動(dòng)程序的平均高度數(shù)據(jù)。我們訓(xùn)練 Pixycam2 識(shí)別帶有“頂部”、“右”和“左”標(biāo)簽的塊。
我們重新分配了 IR-LOCK PX4 驅(qū)動(dòng)程序的原始代碼,針對(duì) Pixycam2 協(xié)議對(duì)其進(jìn)行了修改,并添加了代碼以根據(jù)三個(gè)可識(shí)別的色塊而不是 IR-LOCK 的單一目標(biāo)在 xy 坐標(biāo)中定位無(wú)人機(jī)。我們還添加了代碼以使用 Pixycam2 的 xy 坐標(biāo)計(jì)算 z 坐標(biāo),這為我們提供了接近著陸臺(tái)時(shí)識(shí)別塊的大小。此 z 距離用于增強(qiáng)從 Coral Dev 板配套計(jì)算機(jī)通過(guò) Mavlink 發(fā)送的 TFMini“激光雷達(dá)”傳感器數(shù)據(jù)。
Pixycam2 自動(dòng)著陸系統(tǒng)的 C++ PX4 驅(qū)動(dòng)程序代碼可在我們的 Hovergames PX4 git repo fork 中獲得。
自動(dòng)充電系統(tǒng)
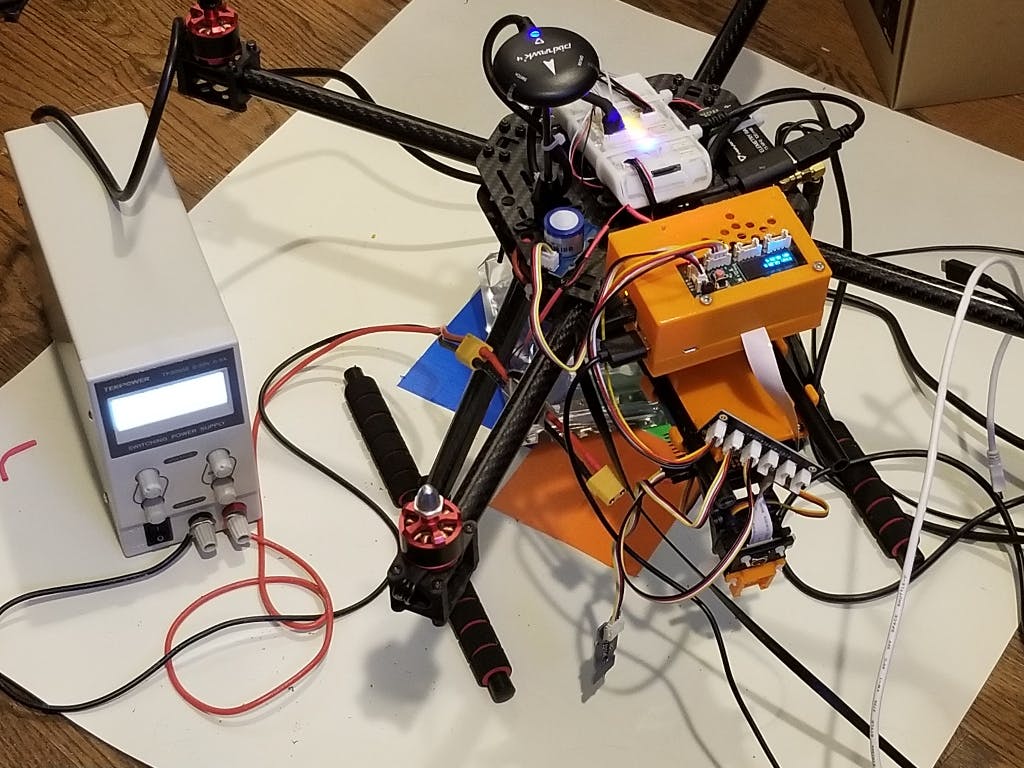
我們收到了帶有 hovergames 套件的基本鋰聚合物充電器,可通過(guò) 4 針或 5 針連接器為 3 節(jié)或 4 節(jié)鋰聚合物電池充電。我們的無(wú)人機(jī)由 3 節(jié)鋰聚合物電池供電,該電池使用四根電線進(jìn)行充電。我們使用銅帶在 Pixyxam2 著陸墊上創(chuàng)建了四個(gè)著陸墊,這些著陸墊與無(wú)人機(jī)起落架上的四個(gè)銅帶部分相匹配。
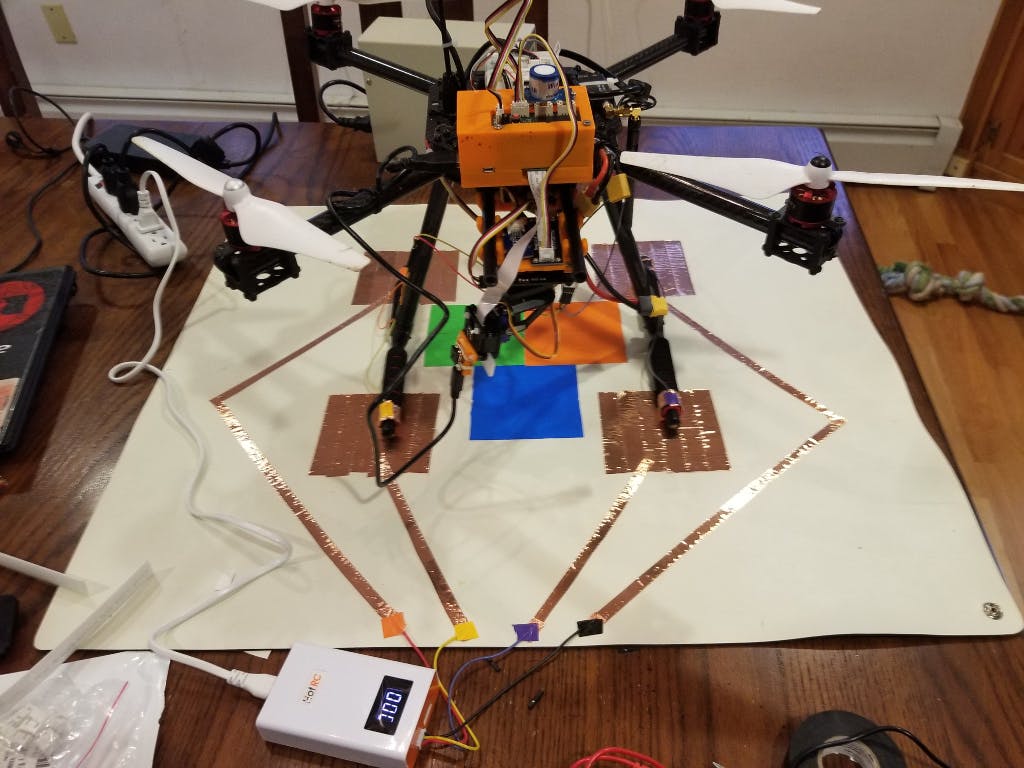
Pixycam2 著陸系統(tǒng)的分辨率約為 10 厘米(2.5 英寸),因此我們創(chuàng)建了四個(gè) 10 厘米見(jiàn)方的銅箔充電墊,并通過(guò)我們?cè)谥憠|上鋪設(shè)的銅帶走線將它們反饋回充電器。當(dāng) Pixycam2 精密著陸系統(tǒng)采取將無(wú)人機(jī)放置在著陸墊上,它還將充電觸點(diǎn)置于充電墊的中心。當(dāng)無(wú)人機(jī)著陸時(shí),它會(huì)自動(dòng)開(kāi)始為下一個(gè)任務(wù)充電。
該系統(tǒng)的完全運(yùn)行版本可以使用兩架無(wú)人機(jī),其中一架始終在空中,而另一架則為其電池充電以提供連續(xù)的機(jī)載覆蓋。理想情況下,它們將通過(guò) W-Fi 網(wǎng)狀網(wǎng)絡(luò)連接(Coral Dev 板上的 QCA6174 Wi-Fi 芯片支持網(wǎng)狀網(wǎng)絡(luò)),傳入的無(wú)人機(jī)可以向其合作伙伴發(fā)出接管信號(hào),因此無(wú)人機(jī)始終在空中提供覆蓋。
Coral 開(kāi)發(fā)板 AI 傳感器系統(tǒng)

飛思卡爾和谷歌創(chuàng)建了 Coral 開(kāi)發(fā)板,該開(kāi)發(fā)板還具有高清攝像頭和傳感器板作為選項(xiàng)。Coral 開(kāi)發(fā)板在 PCB 上包含一個(gè) Google Tensorflow 處理單元或 TPU,通過(guò) PCIe 總線連接到 i.MX8 M 四核 ARM Cortex-A53 CPU。Google 和 Freescale 為這個(gè)名為 Mendel 的開(kāi)發(fā)板創(chuàng)建了一個(gè) Debian 10“Buster”派生的 Linux 操作系統(tǒng)。Coral 開(kāi)發(fā)板由 USB-C 連接器供電,因此我們創(chuàng)建了自己的電纜,通過(guò)無(wú)人機(jī)電池為開(kāi)發(fā)板供電。

我們將 Coral 開(kāi)發(fā)板的 QCA6174 Wi-Fi 芯片重新指定為接入點(diǎn)。我們修改了 dnsmasq 以自動(dòng)將任何 Web 請(qǐng)求重定向到我們?yōu)榇隧?xiàng)目創(chuàng)建的板載 Python Web 服務(wù)器代碼,因此對(duì) http:// 的 Web 請(qǐng)求將重定向到我們的 Python Flask 本地 Web 服務(wù)器。這些攝像頭安裝在連接到 Coral 開(kāi)發(fā)板的 I2C 引腳的低成本 Pimoroni 云臺(tái) HAT 上。移動(dòng)云臺(tái) HAT 的代碼已添加并合并到我們的 Python 網(wǎng)絡(luò)服務(wù)器代碼中,因此用戶可以從網(wǎng)頁(yè)上移動(dòng)攝像機(jī)。
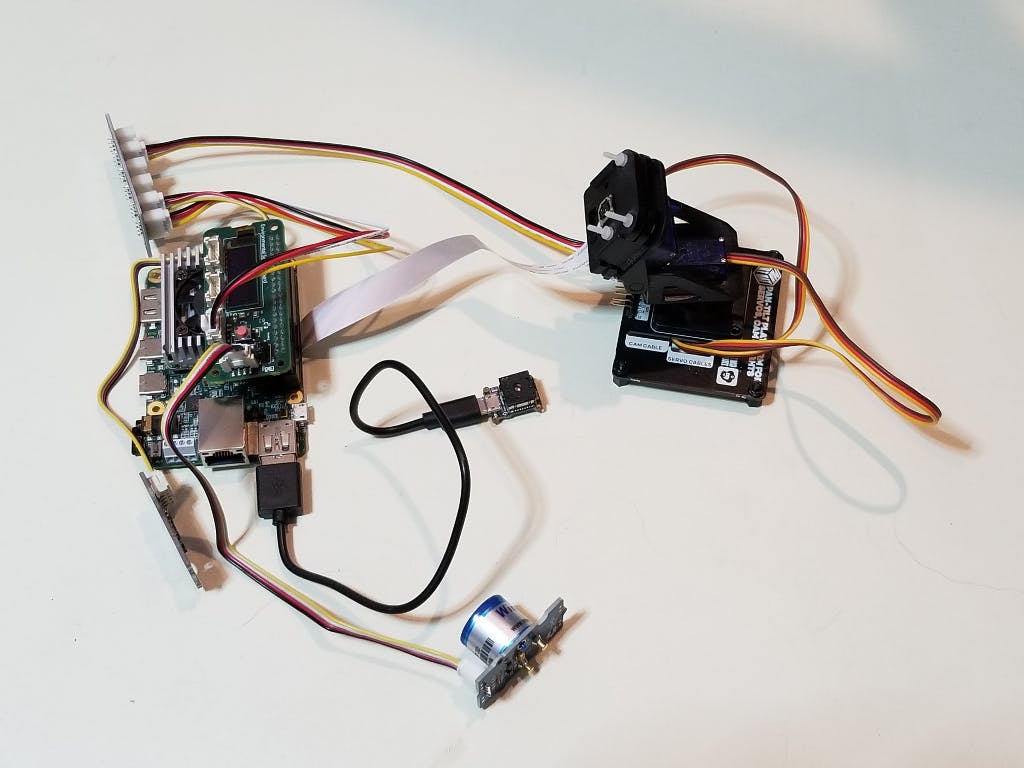
Coral 傳感器板帶有溫度、濕度、壓力和環(huán)境光傳感器。我們將 O2、CO2 和 CO 傳感器添加到傳感器板上的 Grove 連接器,并編寫(xiě) Python 代碼來(lái)記錄無(wú)人機(jī)周?chē)諝庵械?O2 百分比和 CO2、CO 和揮發(fā)性有機(jī)化合物的百萬(wàn)分率。這些傳感器對(duì)于感測(cè)消防員周?chē)奈kU(xiǎn)區(qū)域并報(bào)告該數(shù)據(jù)的實(shí)時(shí)流至關(guān)重要。
我們使用了在 Thingiverse 找到的珊瑚開(kāi)發(fā)板 3D 打印外殼,并修改了適合珊瑚開(kāi)發(fā)板的珊瑚傳感器板的頂部。此功能提供緊急服務(wù)人員或緊急情況下需要幫助的人員位置的實(shí)時(shí)報(bào)告。TPU 運(yùn)行谷歌 Tensorflow 機(jī)器學(xué)習(xí)框架的嵌入式版本,稱為 Tensorflow Lite。我們?cè)趲в?Nvidia GPU 的工作站上設(shè)置了 Tensorflow 訓(xùn)練系統(tǒng)。我們使用位于http://host.robots.ox.ac.uk/pascal/VOC/index.html的 Pascal 視覺(jué)對(duì)象類(lèi) (VOC) 數(shù)據(jù)集來(lái)訓(xùn)練我們的系統(tǒng)識(shí)別物體和人。
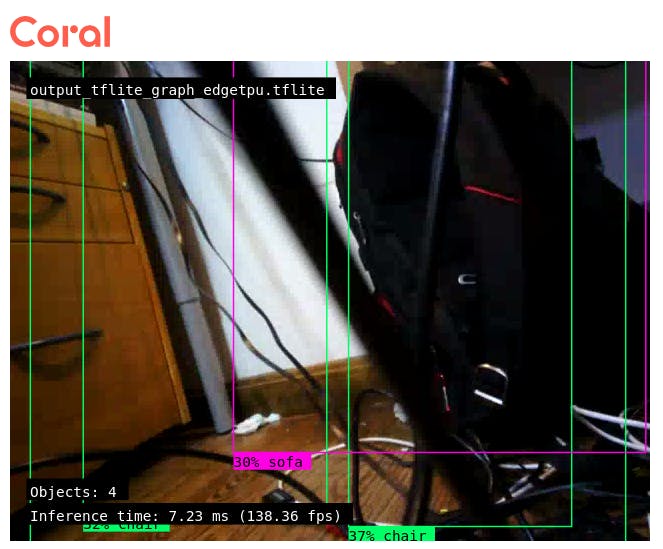
Coral-Dev 板上的 TPU 支持 Tensorflow 深度網(wǎng)絡(luò)拓?fù)涞囊粋€(gè)子集。我們選擇了 mobilnet_v1_ssd 拓?fù)洌驗(yàn)樗苯佑成涔?TPU 使用。訓(xùn)練系統(tǒng)是用Tensorflow Python編寫(xiě)的,將VOC數(shù)據(jù)集上的網(wǎng)絡(luò)訓(xùn)練成.pb文件。我們使用 TensorFlow Lite 工具將 .pb 深度網(wǎng)絡(luò)轉(zhuǎn)換為 Tensorflow Lite 結(jié)構(gòu),然后使用 TPU 實(shí)用程序?qū)ζ溥M(jìn)行編譯,以便在 Google TPU 芯片上使用。該系統(tǒng)通過(guò)高清 Coral Dev 攝像頭識(shí)別并計(jì)算它看到的人數(shù)。每次飛行都會(huì)維護(hù)此計(jì)數(shù),因此查看無(wú)人機(jī)網(wǎng)頁(yè)的人可以看到在最近一次飛行中看到的累積人數(shù)。當(dāng)無(wú)人機(jī)從頭頂飛過(guò)時(shí),在地面上識(shí)別出的人類(lèi)周?chē)L制了方框。
Google 已經(jīng)創(chuàng)建并預(yù)訓(xùn)練了用于對(duì)象檢測(cè)和分類(lèi)的 Tensorflow 模型,因此您不必從頭開(kāi)始構(gòu)建模型。請(qǐng)參閱預(yù)訓(xùn)練模型下的Coral Docuemention頁(yè)面。我們使用 Google 說(shuō)明在臺(tái)式機(jī) Intel i7 CPU 和運(yùn)行 Tensorflow 的 Nvidia GTX 1070 GPU 上設(shè)置基于 VOC 數(shù)據(jù)集圖像的模型重新訓(xùn)練。
使用 VOC 數(shù)據(jù)集重新訓(xùn)練現(xiàn)有的 Tensorflow 模型
1) 確保 CUDA 已安裝并正在運(yùn)行。您可以通過(guò)運(yùn)行“nvcc -V”來(lái)測(cè)試它,它會(huì)輸出 cuda 編譯器版本。
2)混帳克隆https://github.com/tensorflow/models.git
注意:不要按照說(shuō)明安裝 pycocotools -> 請(qǐng)改用 pip3 install pycocotools
4) 運(yùn)行測(cè)試,確保全部返回 OK
5) 克隆https://github.com/PINTO0309/TPU-MobilenetSSD.git
6) cp -Rf TPU-MobilenetSSD/colaboratory/gpu/* models/research/object_detection/
7) chmod 0755 *.py *.sh
8) rm 配置 && mkdir 配置 && cd 配置 && unzip../collab.zip && cd..
9) ln-s。對(duì)象檢測(cè)
10)./prepare_checkpoint_and_dataset.sh --network_type mobilenet_v1_ssd --train_whole_model false
11) rm -Rf object_detection/學(xué)習(xí)/訓(xùn)練
12)部分模型再訓(xùn)練:
NUM_TRAINING_STEPS=500 && NUM_EVAL_STEPS=100 && ./retrain_detection_model.sh \
--num_training_steps ${NUM_TRAINING_STEPS} \
--num_eval_steps ${NUM_EVAL_STEPS}
注意:忽略有關(guān)已棄用 API 的警告
在我們的 GTX 1070 上,這個(gè)過(guò)程運(yùn)行了四天。擁有重新訓(xùn)練的網(wǎng)絡(luò)后,您需要將其轉(zhuǎn)換為 Coral Dev 板上的 Google TPU 芯片可用的格式。訓(xùn)練完成后,最后一行將列出您需要轉(zhuǎn)換為 TensorflowLite 的 .pb 文件的位置,作為在 Coral Dev board 的 TPU 上運(yùn)行的預(yù)備步驟。
將 .pb 文件轉(zhuǎn)換為 TensorflowLite
使用https://coral.ai/docs/edgetpu/models-intro/中的說(shuō)明,我們將 .pb 文件轉(zhuǎn)換為 TensorflowLite 格式。
./convert_checkpoint_to_edgetpu_tflite.sh --checkpoint_num 500
按照說(shuō)明安裝 edgetpu 編譯器。運(yùn)行以下命令將 TensorflowLite 文件轉(zhuǎn)換為 TPU 版本。
edgetpu_compiler output_tflite_graph.tflite
將文件 output_tflite_graph_edgetpu.tflite 和labels.txt文件復(fù)制到您的 Coral Dev 開(kāi)發(fā)板根文件系統(tǒng),以便我們可以運(yùn)行模型來(lái)檢測(cè)高清攝像機(jī)流中的物體和人類(lèi)。
運(yùn)行模型:
edgetpu_detect_server --model ./output_tflite_graph.tflite --labels ./labels.txt
高清攝像機(jī)流將顯示在 Web 端口 4664 上,并在檢測(cè)到的人和物體周?chē)鷰в袠?biāo)記框。
實(shí)時(shí)傳感器數(shù)據(jù)
我們購(gòu)買(mǎi)了一個(gè) Coral 傳感器板,它是帶有 Google TPU 的 Coral 開(kāi)發(fā)板的子板。
將紅外攝像機(jī)添加到 PanTiltHat
我們從 GroupGets 網(wǎng)站上挑選了一個(gè)帶有微型 USB 連接器的微型 FLIR 紅外攝像機(jī)。顯示的傳感器數(shù)據(jù)是溫度、濕度、氣壓、氧氣水平、二氧化碳水平、揮發(fā)性有機(jī)化合物水平以及以勒克斯為單位的周?chē)庹諒?qiáng)度的實(shí)時(shí)視圖。
結(jié)論
構(gòu)建這個(gè)項(xiàng)目是迄今為止 hackster.io 上最有趣的項(xiàng)目之一。這也是我第一次嘗試使用無(wú)人機(jī)。帶有攝像頭和傳感器的智能、獨(dú)立 AI 平臺(tái)的想法非常吸引人,我期待在未來(lái)擴(kuò)展該系統(tǒng)的功能。Freescale/NXP i/MX8 quad 64 位 ARM CPU 具有相當(dāng)大的馬力,再加上 Google TPU,使其成為一個(gè)非常驚人的系統(tǒng),價(jià)格遠(yuǎn)低于 200 美元。
當(dāng)無(wú)人機(jī)飛過(guò)頭頂時(shí)識(shí)別人和物體的能力開(kāi)辟了巨大的新可能性。這個(gè)系統(tǒng)可以擴(kuò)展成一個(gè)完全獨(dú)立的機(jī)器人飛行器,它可以在每次任務(wù)后保持充電狀態(tài)并準(zhǔn)備好飛行,而不需要人類(lèi)手動(dòng)移除電池并為電池充電。通信能力與 TPU AI 檢測(cè)功能相結(jié)合意味著它可以掃描一個(gè)區(qū)域并報(bào)告其發(fā)現(xiàn),而無(wú)需專(zhuān)人觀看攝像機(jī)流。這個(gè)系統(tǒng)可以演變成一個(gè)自主的獨(dú)立人工智能平臺(tái),可以執(zhí)行復(fù)雜的任務(wù),而不需要人工干預(yù)來(lái)保持它的運(yùn)行和飛行。
- 2023年人工智能產(chǎn)業(yè)概況及應(yīng)用趨勢(shì)分析 6次下載
- 人工智能是干嘛的 人工智能在金融行業(yè)的應(yīng)用 0次下載
- 人工智能是干嘛的 人工智能在教育中的應(yīng)用研究 0次下載
- 什么是人工智能 人工智能應(yīng)用領(lǐng)域 0次下載
- 人工智能專(zhuān)題報(bào)告:生成式人工智能產(chǎn)業(yè)全梳理 3次下載
- 基于人工智能的能源管理平臺(tái)
- 基于人工智能驅(qū)動(dòng)的關(guān)鍵信息基礎(chǔ)設(shè)施防御 4次下載
- 人工智能芯片技術(shù)白皮書(shū) 29次下載
- 人工智能的倫理智能體應(yīng)用及相關(guān)研究 7次下載
- 人工智能控制技術(shù)的發(fā)展與研究現(xiàn)狀 15次下載
- 人工智能到底是什么?什么工作需要學(xué)習(xí)人工智能 17次下載
- 為什么Python是人工智能最好的編程語(yǔ)言Python有什么優(yōu)勢(shì) 15次下載
- 人工智能行業(yè)發(fā)展?fàn)顩r如何?人工智能行業(yè)研究報(bào)告詳細(xì)資料免費(fèi)下載 15次下載
- 人工智能深度學(xué)習(xí)處理架構(gòu)的演進(jìn)GPU功耗和延遲問(wèn)題如何解決 28次下載
- 電子書(shū) 中美人工智能行業(yè)生態(tài)比較 243次下載
- 生成式人工智能和感知式人工智能的區(qū)別 1158次閱讀
- aigc是什么意思和人工智能有什么區(qū)別 9179次閱讀
- 人工智能給教育帶來(lái)哪些巨大好處 7937次閱讀
- 如何避開(kāi)人工智能的陷阱 1179次閱讀
- 人工智能與機(jī)器學(xué)習(xí)的區(qū)別 4111次閱讀
- 什么是人工智能上百個(gè)人工智能的經(jīng)典問(wèn)答 6027次閱讀
- 破局人工智能:AI平臺(tái)及智能語(yǔ)音應(yīng)用解析 7036次閱讀
- 人工智能技術(shù)有哪些_人工智能技術(shù)的原理 6.1w次閱讀
- 人工智能為何這么熱_人工智能價(jià)值與應(yīng)用_無(wú)人機(jī)屬于人工智能嗎 7411次閱讀
- 人工智能相關(guān)的人與技術(shù)都在這里_人工智能的相關(guān)技術(shù) 4754次閱讀
- 全球人工智能大學(xué)有哪些_人工智能全球大學(xué)排名 5.3w次閱讀
- 人工智能需要哪些知識(shí)_人工智能需要學(xué)什么_如何自學(xué)人工智能 4.4w次閱讀
- 學(xué)人工智能10本必看書(shū)_人工智能入門(mén)書(shū)籍推薦 7w次閱讀
- 人工智能對(duì)教育的沖擊及對(duì)孩子的影響 2w次閱讀
- 人工智能+教育這條路怎么走_(dá)人工智能+教育趨勢(shì)分析 2.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論