 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
如果您無法獲得相同的尺寸,您可能需要調(diào)整各種組件的尺寸以適合您的球。對于這個技巧,您至少需要 8 個球(2 組,每組 4 種顏色。例如粉紅色、紫色、藍色和綠色)。我還有一對備用的黃色球,以防我們的狗染上其他顏色之一:)
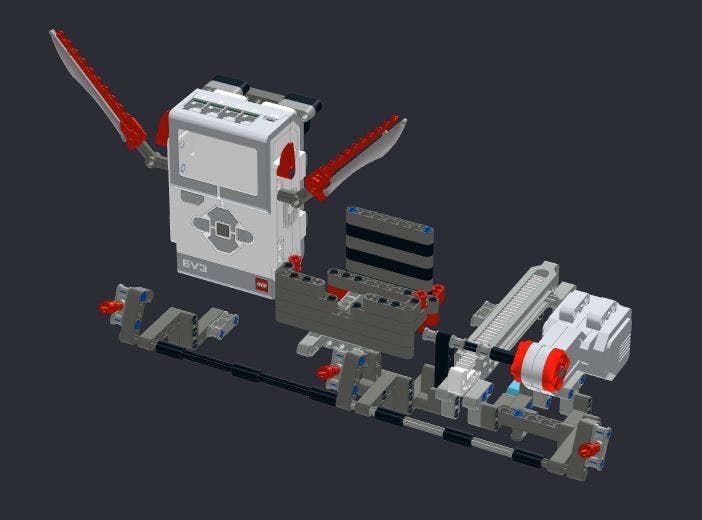
活板門機器人
搭建樂高積木:
我建議從拼搭樂高開始,以確保尺寸適合您擁有的彩球。我已經(jīng)包含了使用 Bricklink 的 Studio 2.0 軟件的構(gòu)建說明。您需要安裝它才能查看它們。您將在原理圖部分下找到這些文件:
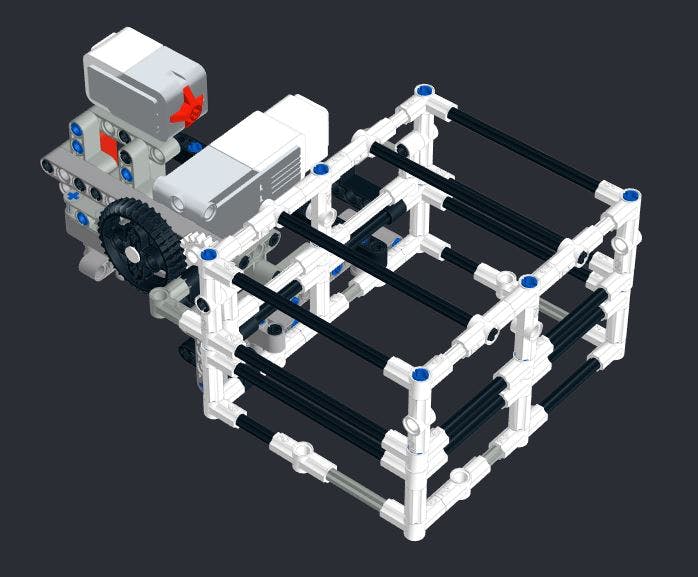
- 活板門機器人 - 這包括活板門機制。這包括一個鎖扣,它可以將門固定到位,直到它移動以釋放門。
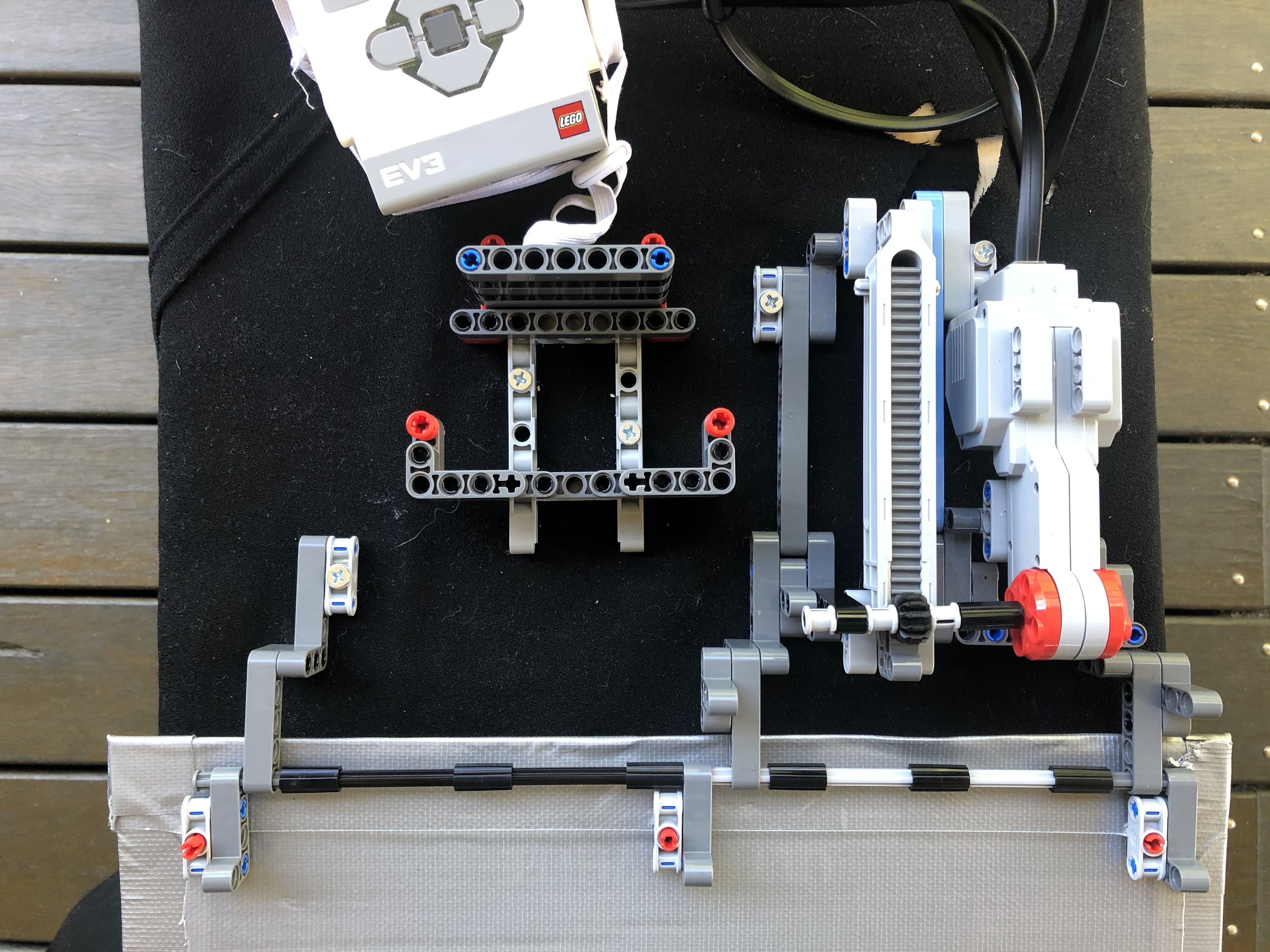
- 魔法盒 1 和 2 - 您需要建造 2 個相同的盒子。他們坐在活動板桌的頂部,在演出期間打開和關閉。注意:這些模型缺少一個 24 齒齒輪,該齒輪位于中型電機的軸上并與另一個 24 齒齒輪嚙合以打開箱蓋。該工具不允許我將其放置到位。我想我需要將其中一個齒輪旋轉(zhuǎn)幾度,但我不知道該怎么做,抱歉。您會在照片上看到丟失的裝備。
如果您的彩球較大,您可能需要調(diào)整樂高積木以適應。這也會影響其他部分,例如木制品尺寸,因此請注意這一點。
構(gòu)建 Pixy2 盒子:
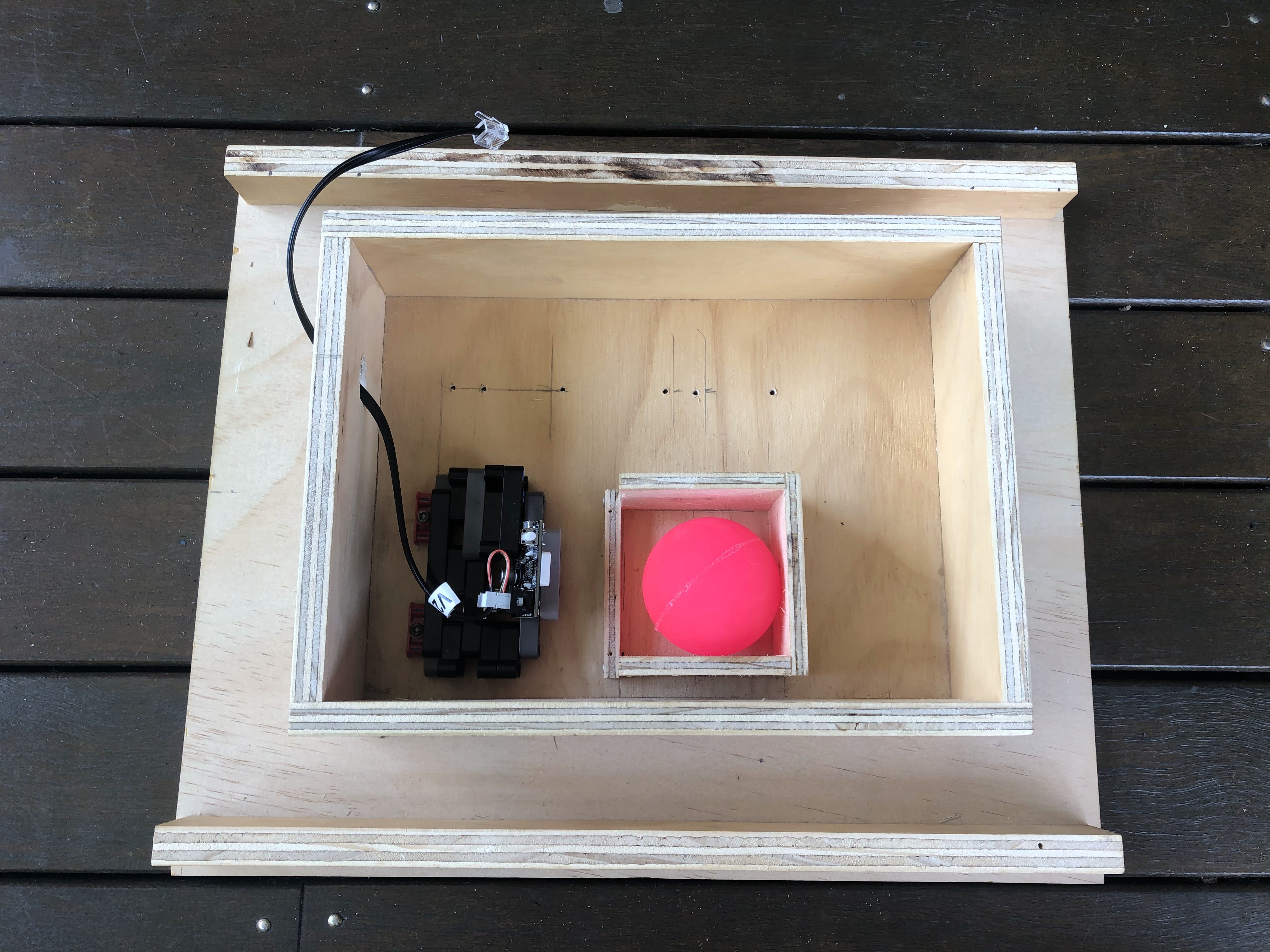
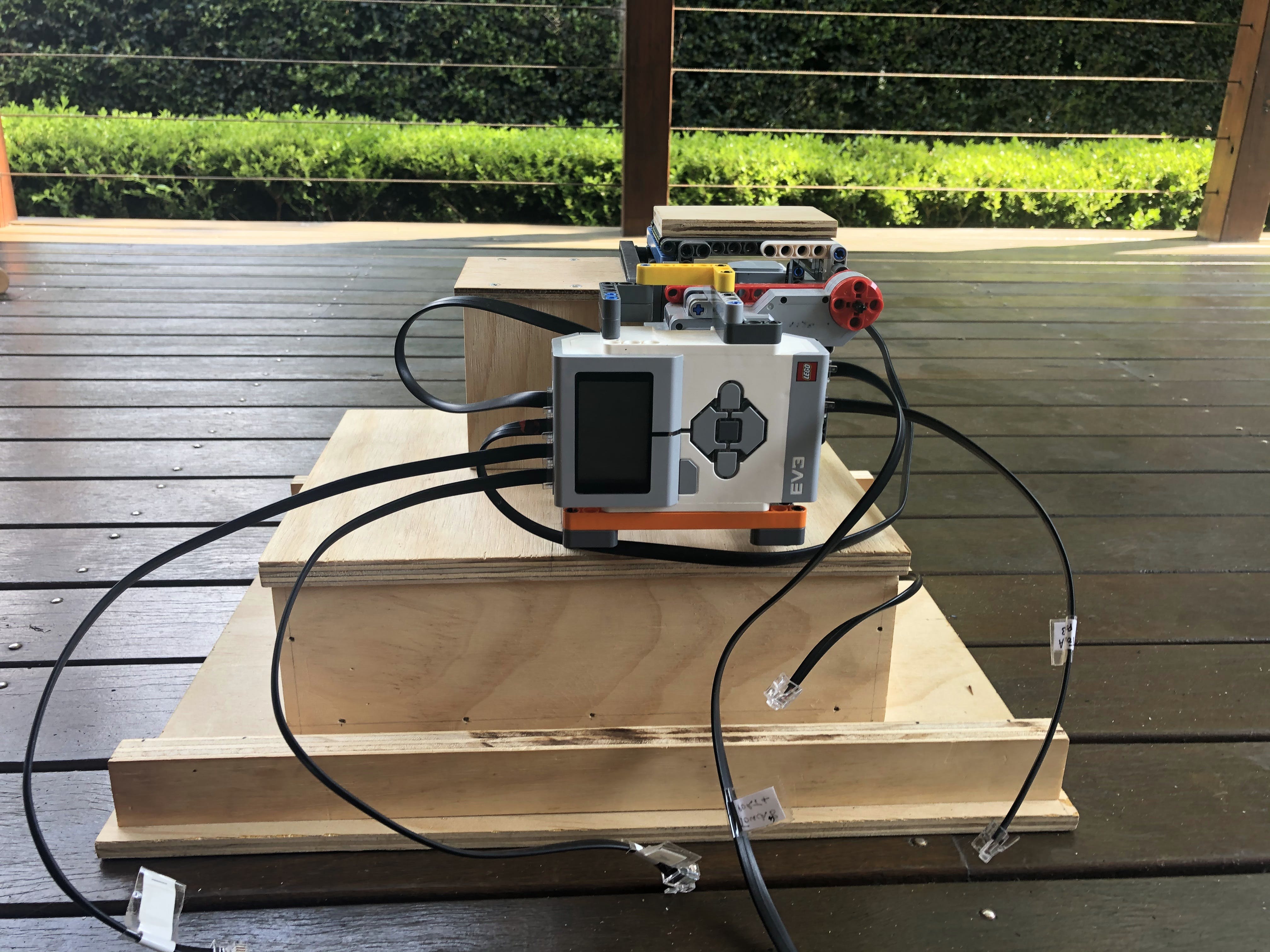
您將需要一個盒子來放置 Pixy2 相機并將活板門機器人放在上面。最初的設計是在盒子內(nèi)包含 EV3 積木。效果不是很好,因為您看不到屏幕,所以 EV3 積木被移到了盒子外面。這意味著盒子是半空的,但蓋子可以很好地固定活板門機器人。
首先在 250mm x 180mm 的矩形中切割 12mm 的層作為盒子底座。對于方框切割的側(cè)面:
- 2 x 275 毫米 x 80 毫米,12 毫米層
- 2 x 180 毫米 x 80 毫米,12 毫米層
底座適合兩側(cè)。首先將短邊連接到底座的短邊。這可以使用膠水、螺絲或釘子來完成。接下來將長邊連接到底座和您已經(jīng)連接的短邊。
對于盒蓋,在 280 毫米 x 210 毫米的矩形中切割 12 毫米的層。為了使蓋子位于底座上,將 7mm 的層切成至少 12mm 寬的長度,以適合底座內(nèi)部:
- 2 x 248 毫米長
- 2 x 178 毫米長
將末端切割成 45 度角,然后擰入蓋子的底部,作為蓋子固定在底座上的導向。
最后你應該有一個盒子來裝 Pixy2 相機,蓋子可以很好地放在上面。您將在稍后的構(gòu)建中完成剩余的部分(連接 Pixy2、電纜孔、蓋子上的孔和球托架)。
注意:以下圖片包括您接下來要搭建的活板門桌底座。
搭建桌面、底座和桌腿:
臺面和底座的構(gòu)造與最初相同。首先在 400 毫米 x 330 毫米的矩形中切割 9 毫米的層作為桌子的頂部,另一個相同尺寸的矩形作為桌子的底部。
接下來,您需要切割 4 條導軌:2 條用于桌面,2 條用于底座。使用 15mm 的鋪層并切割 390mm(即比頂部/底部略短)30mm 的長度。切割完導軌后,就可以將它們連接到桌面和底座上了。從底座開始,在距離長邊 10 毫米的地方劃一條線。將導軌的邊緣放在這條線上,與底座的短邊有 5 毫米的間隙。將其夾緊,然后用至少 3 個螺釘從底座下方擰入。用另一條導軌在底座的另一側(cè)重復。你的基地現(xiàn)在應該已經(jīng)完成??了。
對于桌面,以相同的方式將 2 個導軌連接到桌子的底部。底部的導軌與頂部的導軌完美對齊非常重要,因此要格外小心。完成此操作后,您可以移動到腿上。
四個腿也從 9 毫米層切割。我的是 210 毫米 x 40 毫米,但我建議您將它們留長一點(例如 250 毫米),然后在檢查完所有其他測量值后將其剪短。腿被擰入桌面導軌的內(nèi)部,距離導軌末端約 10 毫米,每條腿至少有 2 個螺釘,因此腿不會旋轉(zhuǎn)。底部支腿未擰入底座的導軌中。相反,它們會楔入底座導軌的內(nèi)部,以將它們固定在適當?shù)奈恢茫苋菀撞鹦丁?/font>您需要它是可拆卸的,以便每次都能取回球。

連接 Pixy2 盒子和活板門 LEGO:
在連接任何其他東西之前,將 Pixy2 盒子放在桌子底座上,然后將活板門樂高積木放在 Pixy2 盒子蓋上。根據(jù)活板門在頂部的位置,檢查它的位置是否正確。一旦你對一切都滿意了,標記位置并開始附加它們:
- 將樂高積木擰入蓋子(2 個螺釘穿過橫梁孔,不要擰得太緊,以免損壞塑料)
- 將盒子底座擰到桌面底座上,至少 2 個螺絲。
完成 Pixy2 盒蓋:
現(xiàn)在是時候為球從活板門滾入 Pixy2 盒子創(chuàng)建路徑了。首先,您必須在 Pixy2 蓋子上切一個 60 毫米的孔。它應該靠近樂高積木,這樣當活板門掉落時,球會直接滾進去。
為確保活板門落下時球不會滾走,您需要建造一個屏障盒。這將有 3 個邊,一個開口邊允許球從活板門滾下。它將有一個頂部但沒有底部,因為它位于孔上方的蓋子上。你將需要削減:
- 1 x 90mm x 90mm 方形 5mm 層
- 2 x 90mm x 90mm 正方形的 9mm 層
- 1 x 65mm x 90mm 矩形,9mm 層
要組裝盒子,首先將 65mm x 90mm 矩形的最長邊粘合到 9mm 層的 90mm x 90mm 方形的邊之一。在另一側(cè)重復此操作。完成后,從蓋子底部擰入,使其位于蓋子上 60 毫米的孔周圍。然后,您需要將 90mm x 90mm 的 5mm 層板擰到頂部,確保它沒有 LEGO 構(gòu)建。
球現(xiàn)在應該一直滾下活板門進入 Pixy2 盒子。如果這有任何問題,您需要先解決它們,然后再繼續(xù)。
完成 Pixy2 盒子底座:
當球進入 Pixy2 盒子時,它需要保持靜止,以便相機可以檢測到顏色。要制作這個貨艙,您必須切割:
- 2 x 70mm x 50mm 的 9mm 層
- 1 x 80mm x 50mm 的 9mm 層
使用 2 個螺釘將其中一個較短的邊以直角連接到較長的簾布層上。對另一個較短的邊重復以創(chuàng)建一個 50 毫米高的 3 邊箱。
為確保球不會滾出盒子的前部,切割 80 毫米 x 15 毫米的 9 毫米層。從前面將其擰入盒子的側(cè)面,沒有障礙物。這意味著球會留在原地,但不會阻擋 Pixy2 看到球。
當你對你的盒子感到滿意時,將它放在蓋子上的孔下方并標記你想要放置它的位置。用至少 2 顆螺絲從下方將其擰入 Pixy2 盒子底座。注意:您需要從活板門桌底座上卸下 Pixy2 盒底座,這樣您才能執(zhí)行此操作,然后重新連接它。
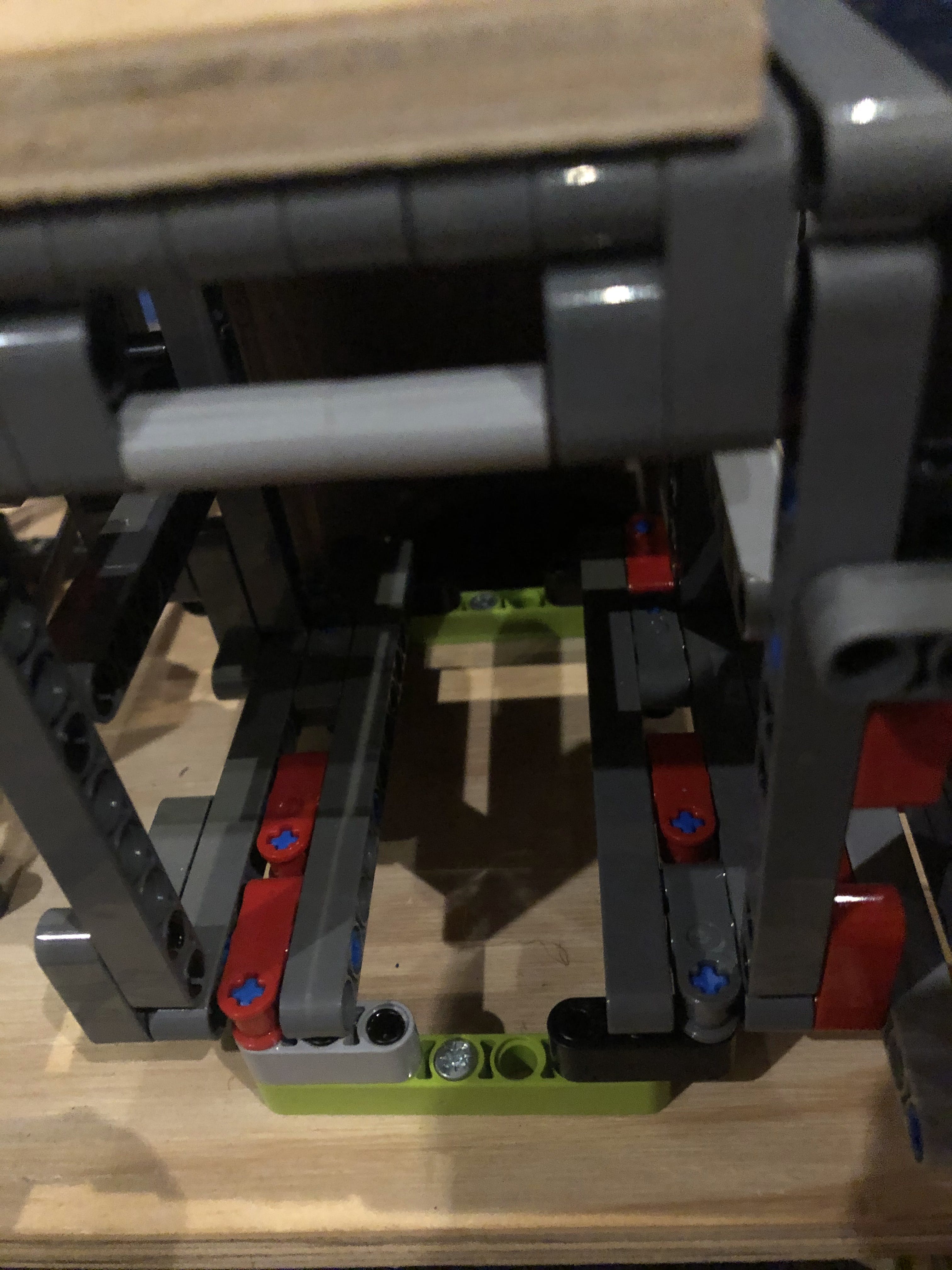
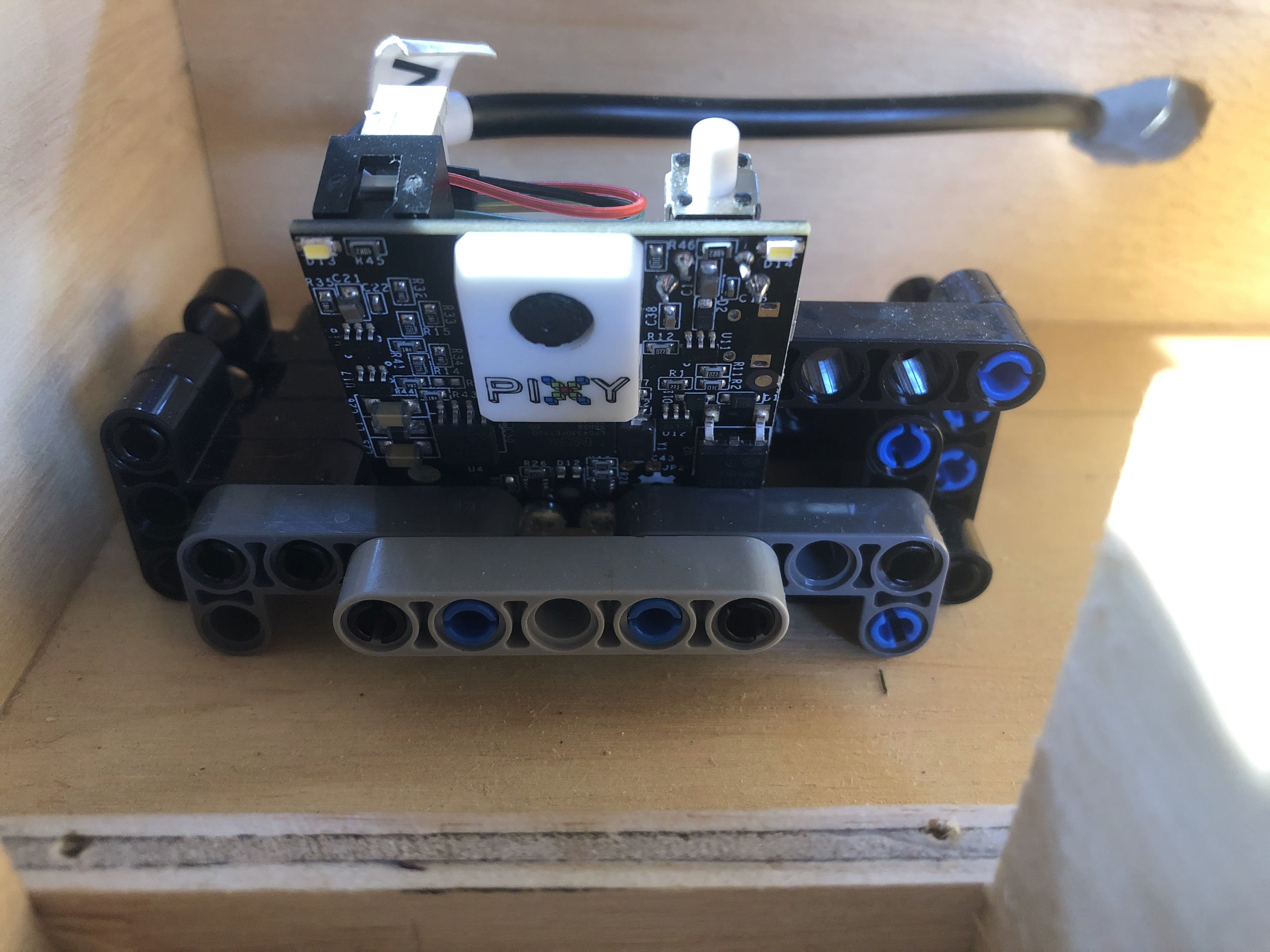
接下來,您必須為 Pixy2 相機搭建一個支架。首先,將 Pixy2 安裝到一根樂高橫梁上——我使用了一根長度為 9 的橫梁。利用這根橫梁搭建一個堅固的底座,讓 Pixy2 可以看到球。我建議將 Pixy2 連接到您的計算機并查看 Pixy2 可以看到的內(nèi)容,以確保它距離正確并且角度正確。我還添加了一些樂高積木,以防止 Pixy2 向后或向前傾斜得太遠。您應該包括一些部件,以便將支架輕輕擰入 Pixy2 盒底座以將其固定到位。我沒有包含樂高支架的搭建說明,但您應該能夠參考圖片自己制作一些東西。
接下來,您需要在盒子的側(cè)面切一個洞。它必須足夠大以供 2 根電纜穿過;Pixy2 到 LEGO 電纜和用于在計算機上查看 PixyMon 的 USB 電纜。Pixy2 到 LEGO 的電纜相對較短,因此您需要確保它可以從 Pixy2 連接到積木。
完成活板門和桌面:
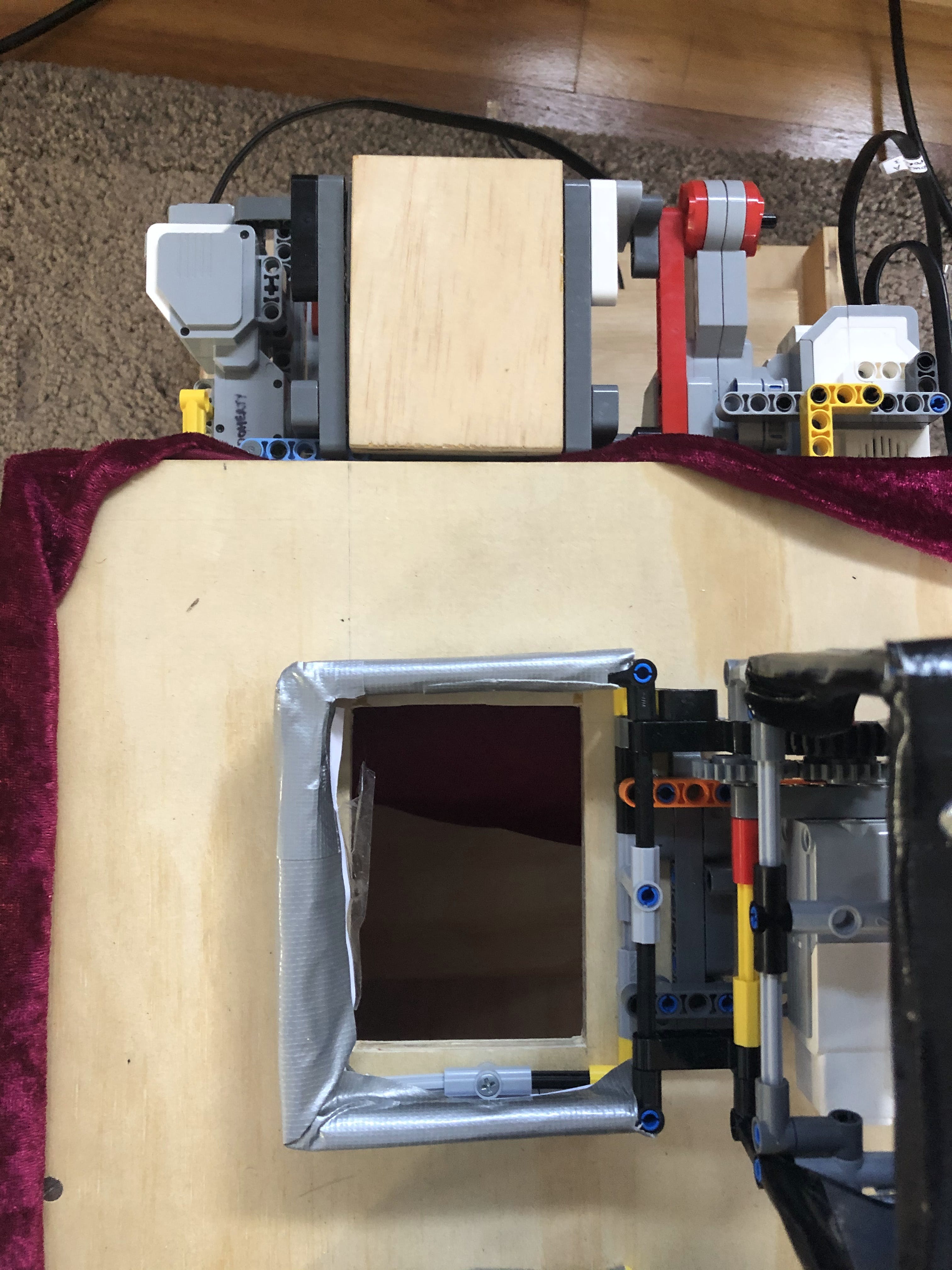
首先,您需要切割一個矩形作為活板門。如果您完全按照我的說明進行操作并且沒有調(diào)整球的大小,那么您應該切割相同的尺寸。從 9 毫米的層中切出 63 毫米乘 87 毫米的矩形。然后按照圖片用活板門底部的螺絲將其固定到樂高積木上。

接下來,您必須在桌面上切出一個矩形,為活板門提供一個放置位置,使其與桌面齊平。下圖顯示了您需要到達的地方。
你需要稍微滑動桌子,這樣你才能看到桌面上的活板門有多寬。標記一條線,這樣您就知道長邊將在哪里排列,然后標記短邊將在哪里排列。要創(chuàng)建孔,請在角內(nèi)鉆 4 個孔。完成后,使用鋸子在 4 個孔之間切割以創(chuàng)建一個粗略的矩形。請記住,從小處著手并稍大一點總比讓它太大要好。如果您可以使用路由器,則可以更輕松地切割漂亮的直線。確保每次切割時都檢查活板門是否合適。您將需要在所有側(cè)面至少留出 2 毫米的額外間隙,并且在活板門掉落的末端可能需要多一點。
附上魔法盒:
在連接盒子之前,您必須隱藏內(nèi)部結(jié)構(gòu)。我的盒子是用硬紙板和布膠帶裝飾的。如果你想讓你的盒子更有魔力,你可以添加閃光和水鉆之類的東西。
接下來,您必須將盒子連接到桌面。為此,請將它們放在桌面的正確位置。左邊的盒子里面需要有切割的矩形,右邊的盒子必須排成一行,但它們之間有一個間隙。當您對定位螺釘感到滿意時,使用軸連接器上的孔將它們擰入。

連接電纜:
現(xiàn)在所有的木制品都已就位,是時候給機器人接線了。按如下方式連接電纜:
- A - 方框 1(左邊一個)
- B - 方框 2(右邊一個)
- C - 陷阱門
- D - 活板門
- 1 - Pixy2(Pixy2 樂高附帶的特殊電纜)
- 2 - 未使用
- 3 - 盒子 1 上的觸摸傳感器
- 4 - 盒子 2 上的觸摸傳感器
我強烈建議在電纜上貼上標簽,以防您需要將它們拆開再重新組裝起來。
魔盒機器人
搭建樂高積木:
我再次包含了使用 Bricklink 的 Studio 2.0 軟件的構(gòu)建說明。您將在原理圖部分下找到這些文件:
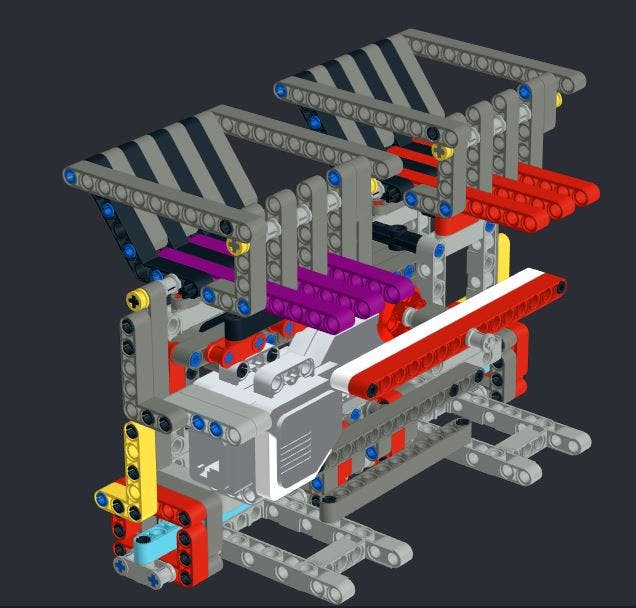
- 蹺蹺板 - 這是將正確的球傾斜到斜坡上的機制。在模型中只有一側(cè)。您需要為另一側(cè)制作一個鏡像模型。通常顏色并不重要,但桶中的顏色有助于了解每個桶中的球。注意:我沒有粉紅色的光束,所以用紅色代替裝有粉紅色球的桶。
- 斜坡和吊橋 - 這是球滾下進入魔法盒的斜坡。
- 魔法盒子 3 - 您需要建造一個與活板門桌上的盒子相同的盒子。下面的構(gòu)建說明中列出了一些附加內(nèi)容(為 Magical Box 3 構(gòu)建基礎)
搭建魔法盒桌底:
Magical Box 機器人的木制品與 Trapdoor 相似,幸運的是更簡單!首先使用 9mm 層切割 480mm x 300mm 的矩形底座。使用 18mm 層切割 6 個 300mm x 30mm 的導軌。使用 3 個螺釘將一根導軌連接到底座,與其中一個短邊對齊。使用 3 個螺釘將第二個導軌連接到距離另一個短邊 80 毫米的底座上。您應該還剩下 4 個導軌。
為了更容易取下頂部,腿連接到底座。切割 4 條 210mm x 30mm 的 18mm 層的腿。每條腿使用 2 個螺釘將它們垂直連接到導軌內(nèi)側(cè)。將 2 條導軌連接到頂部支腿的內(nèi)側(cè),每條支腿各擰 1 個螺釘。
搭建魔法盒桌面:
使用 9mm 層切割 400mm x 300mm 的矩形頂部。用 3 個螺絲將 2 個剩余的導軌連接到頂部的下側(cè),與短邊對齊。頂部應從底座整齊地貼合到腿的外邊緣。

附上樂高積木:
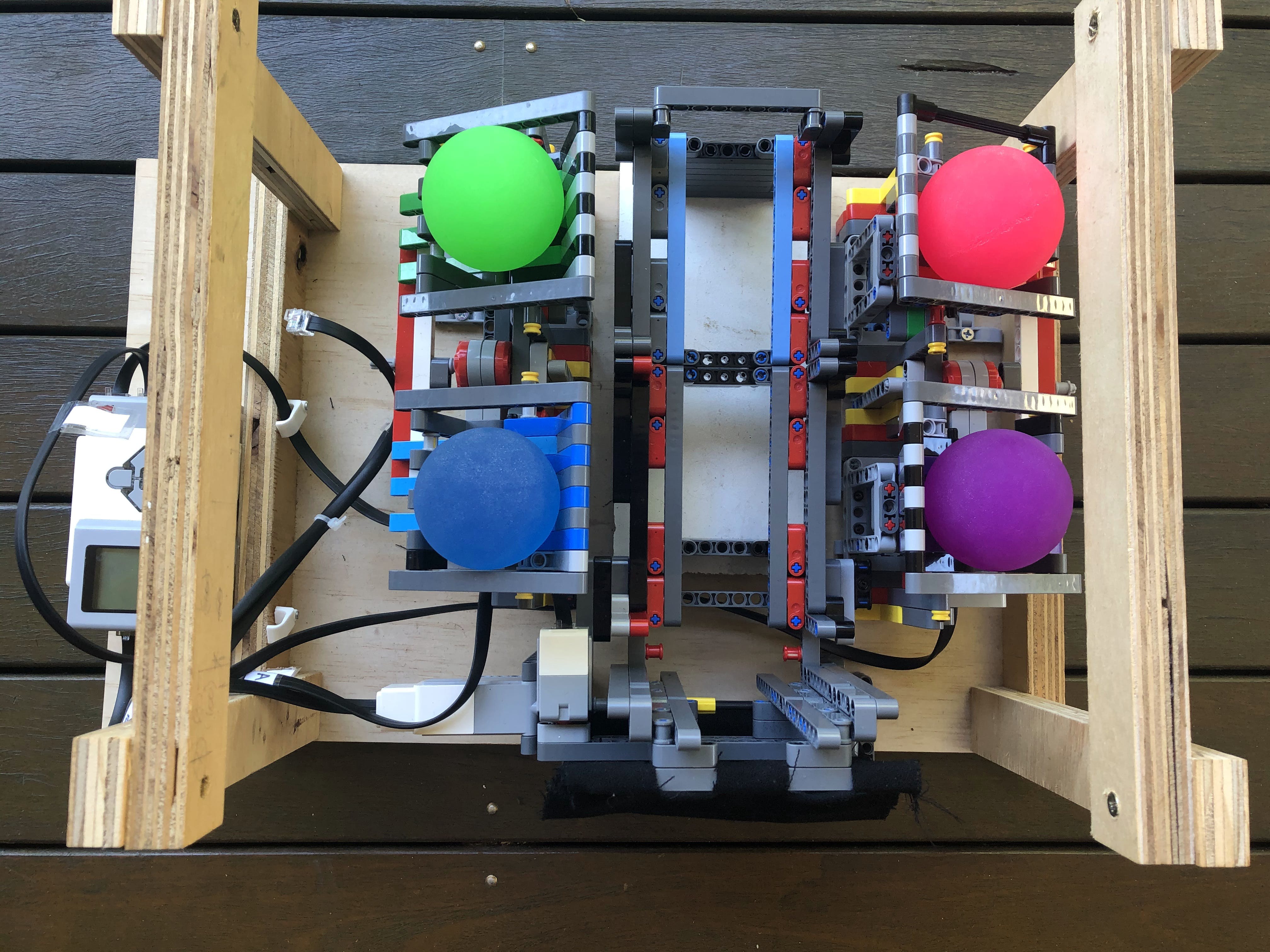
使用 18 毫米厚的 100 毫米 x 210 毫米創(chuàng)建一個平臺。使用備用孔將坡道和吊橋擰到上面。您會注意到斜坡會有輕微的傾斜度,以便球滾下。通過使用框架孔安裝第一個蹺蹺板來布置樂高積木。然后安裝坡道,確保球傾斜到上面,并且它們可以自由地滾下坡道而不會撞到桶的末端。像第一個一樣安裝第二個蹺蹺板,同時檢查球是否可以自由滾動。我還安裝了一些橫梁,用螺絲固定在 EV3 連接的底座上。
為 Magical Box 3 建立基礎:
使用廢木頭,為魔法盒做一個底座。您需要確保有足夠的空間讓吊橋在完全降下時輕輕地停在箱子的邊緣(即檢查高度和與坡道的距離)。接下來以與桌面上的相同的方式連接盒子。確保有一個用于填充的孔,以確保球不會彈開。您可以參考我的照片來創(chuàng)建適合您構(gòu)建的基礎。

連接電纜
現(xiàn)在所有的木制品都已就位,是時候給機器人接線了。按如下方式連接電纜:
- A - 藍色和綠色球的蹺蹺板
- B - 藍球和綠球的蹺蹺板
- C - 方框 3
- D - 吊橋
- 1 - 未使用
- 2 - 未使用
- 3 - 盒子 3 上的觸摸傳感器
- 4 - 吊橋上的觸摸傳感器
揭秘機器人
搭建樂高積木:
您將在原理圖部分下找到一個 LEGO 構(gòu)建說明文件:
- Revealer - 這是將標志向前推使其掉落并露出傳奇 LEGO MINDSTORMS EV3 積木的機器人。
還有一些零件可以將輪子和電機連接到腿上,但您可以查看下面的照片來解決這個問題。
建造木制品:
從桌面的 9 毫米層中切割出 300 毫米乘 400 毫米的一塊。然后切割 4 個 300mm x 30mm 的 18mm 層的導軌。用 3 個螺絲將 2 個導軌與頂部的兩個短邊對齊。
接下來切割 18 毫米層的 4 條 160 毫米 x 30 毫米的腿。用每條腿上的 2 個螺釘將它們連接到導軌內(nèi)側(cè)的末端。將輪子連接到與照片類似的導軌上。確保你有足夠的空間讓輪子在移動時不會撞到盒子。我們必須將后電動輪放在軌道的外側(cè)才能實現(xiàn)這一點。
一旦它們連接到導軌上,您需要將導軌擰入腿的外側(cè)。重要的是 Revealer 桌面與 Magical Box 桌面齊平。如果您滿意,請在每條腿上使用 1 個螺絲(如果您對此不確定,請參閱照片)。
附上樂高積木:
樂高積木使用一些自由孔固定在桌面上。尺寸并不重要,我只是確保標志位于桌子中央。
標志只是粘在硬紙板上的一張 A4 紙。
連接電纜
現(xiàn)在所有的木制品都已就位,是時候給機器人接線了。按如下方式連接電纜:
- A - 前置電機
- B - 后退電機
- C - 未使用
- D - 標志
注意:您可能需要為 A 和 B 使用更長的電纜。我使用了 1m 電纜。
這個機器人沒有傳感器。
配置 Pixy2 相機
如果您以前沒有使用過 Pixy2 相機,他們的網(wǎng)站上有很多重要信息:https ://docs.pixycam.com/wiki/doku.php?id=wiki:v2:start
我會盡量專注于這個項目特別需要的東西。Pixy2 相機需要配置才能工作。要連接到 EV3,您將需要特殊的 Pixy2 LEGO 電纜,該電纜可在“Pixy2 for LEGO”包中購買或單獨出售。
更新固件
ev3dev 站點上的將 Pixy/Pixy2 相機用于 LEGO Mindstorms解釋說,在將它與 ev3dev 一起使用時,您必須使用 Pixy2 相機上的標準固件而不是 LEGO 固件。如果您為 LEGO 包購買了 Pixy2,那么它很可能帶有 LEGO 固件。改變:
- 從這里下載最新的 Pixy2 通用固件(即不是 LEGO 固件):https ://pixycam.com/downloads-pixy2/
- 使用以下說明更新 Pixy2 上的固件:https ://docs.pixycam.com/wiki/doku.php?id=wiki:v2:uploading_new_firmware
配置用于 ev3dev
接下來按照使用 Pixy/Pixy2 相機用于 LEGO Mindstorms的說明配置 Pixy2,以便 ev3dev 可以連接到它。確保您遵循的是 Pixy2 說明,而不是以前版本的說明。
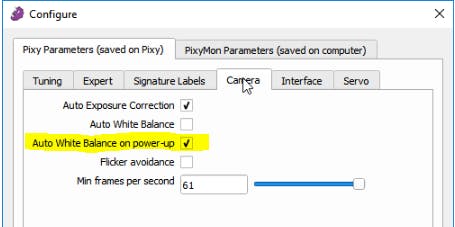
配置白平衡
Pixy2 具有自動調(diào)節(jié)房間照明的能力。這稱為“自動白平衡”。鑒于顏色檢測將在外部光線很少的暗箱中進行(即僅使用來自 Pixy2 本身的光),您可以關閉此設置以確保一致的結(jié)果。使用 PixyMon,轉(zhuǎn)到 Configure 對話框,然后轉(zhuǎn)到 Camera 選項卡。確保“Auto White Balance”和“Auto White Balance on power-up”已關閉(后者通常在新的 Pixy2 相機中默認打開)。
教 Pixy2 顏色
我們現(xiàn)在準備教 Pixy2 球的顏色。注意:當方框 2 打開時,它會顯示您隨機放入的球的顏色。然后相同顏色的球?qū)⒊霈F(xiàn)在 box3 中。
我該如何改進!
我對我的項目的結(jié)果非常滿意,但有些事情我可以用更多的時間和知識來改進:
- 這個項目對我來說很有挑戰(zhàn)性,因為我是第一次使用 Python 進行編碼。我本可以簡化一些代碼,所以請注意復制我所做的代碼。
- 我為我所有的機器人制作了一個樂高模型。不幸的是,我沒有時間一步一步地進行說明,但您將能夠通過參考模型來構(gòu)建它們。
- 為了使這項技能更好,我可以讓 Alexa 跟蹤我們使用會話屬性進行的步驟。但是我發(fā)現(xiàn)當我測試時能夠以任何順序執(zhí)行它們更容易。
- 由Alexa Echo控制的Arduino機器人
- LEGO EV3 Baby Yoda-Alexa控制的EV3機器人
- 由Alexa提供支持的樂高R2D2機器人
- 由Alexa控制的Lego Mindstorms EV3機器人
- 瞳步迎賓講解機器人
- 瞳步消毒機器人方案
- ABB機器人CP中級應用培訓 11次下載
- 了解機器人電子教材下載 19次下載
- 機器人無線充電電路設計 47次下載
- 基于Matlab的機構(gòu)與機器人分析資料下載 11次下載
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 17次下載
- 基于DSP芯片的足球機器人實現(xiàn)與設計 26次下載
- 機器人技術(shù)及其應用說明 4次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- 機器人設計教程之機器人控制和決策子系統(tǒng) 23次下載
- 鑄造機器人是什么?選擇工業(yè)機器人應該考慮的方向 1137次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2126次閱讀
- 工業(yè)機器人技術(shù)應用 5176次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9571次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3122次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發(fā)展 1.1w次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統(tǒng)的火焰處理機器人 3271次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 6828次閱讀
- 人與機器人的自然交互 5067次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀
- foxbot機器人的優(yōu)點及用途介紹 1.6w次閱讀
- 如何使用HRMRP機器人平臺構(gòu)建機器人應用系統(tǒng) 1629次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論