 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
第一階段:項目構想
我正在用手機玩賽車游戲,突然間一個想法進入我的腦海,即用我們的智能手機控制汽車。這個想法讓我探索了所有互聯網,如谷歌、youtube 等,我發現 BOLT-IOT 是學習和以非常系統的方式制作項目的最佳平臺。
第 2階段:硬件收集
在亞馬遜上花了一個小時后,我終于為我的項目買了這個項目
1.機器人小車套件
?

?
2.螺栓套件
?
?
3.電池(帶蓋)
4.跳線
6.螺絲刀
7. 直流電機
第3階段:連接組件_ _
1. 在螺絲刀的幫助下組裝機器人小車和兩個直流電機的組件。
3.將電線連接到電機并將電機線的另一端子連接到L298N電機驅動器。將電機的正極連接到 IN1 和 IN4,將負極連接到 IN2 和 IN3。
4. 將每個電機的兩條線都連接到電機驅動模塊的同一側。(如電機 onr IN1 和 IN2。
5. 將 9V 電池連接器夾連接到電機驅動器的 12V 端子和接地端子。夾子的紅線接 12V,黑線接地
6. 將電機驅動模塊的 5V 引腳連接到 Bolt wifi 模塊的 5V。
7. 現在將引腳 IN1、IN2、IN3、IN4 的跳線連接到螺栓模塊,并將 IN1 引腳連接到機器人的引腳 1,IN2 連接到 2,IN3 連接到 3,IN4 連接到 4。
8. 最后硬件設置完成。
重新檢查專門用于電源輸入的連接
第 4階段:軟件工作
1.如果還沒有注冊的話,先注冊你自己的bolt賬號
2. 現在我們將使用 BOLT-IOT 自動化模板在bubble.io上設計我們的應用程序。
?
?
3.我們使用bubble.io是因為它非常容易在其上構建應用程序,因為它不需要編碼并具有一些令人興奮的功能(例如 bolt 的默認應用程序,以方便您使用)
4.只需轉到 bubble 的歡迎頁面,向下滾動并單擊“創建新應用”。
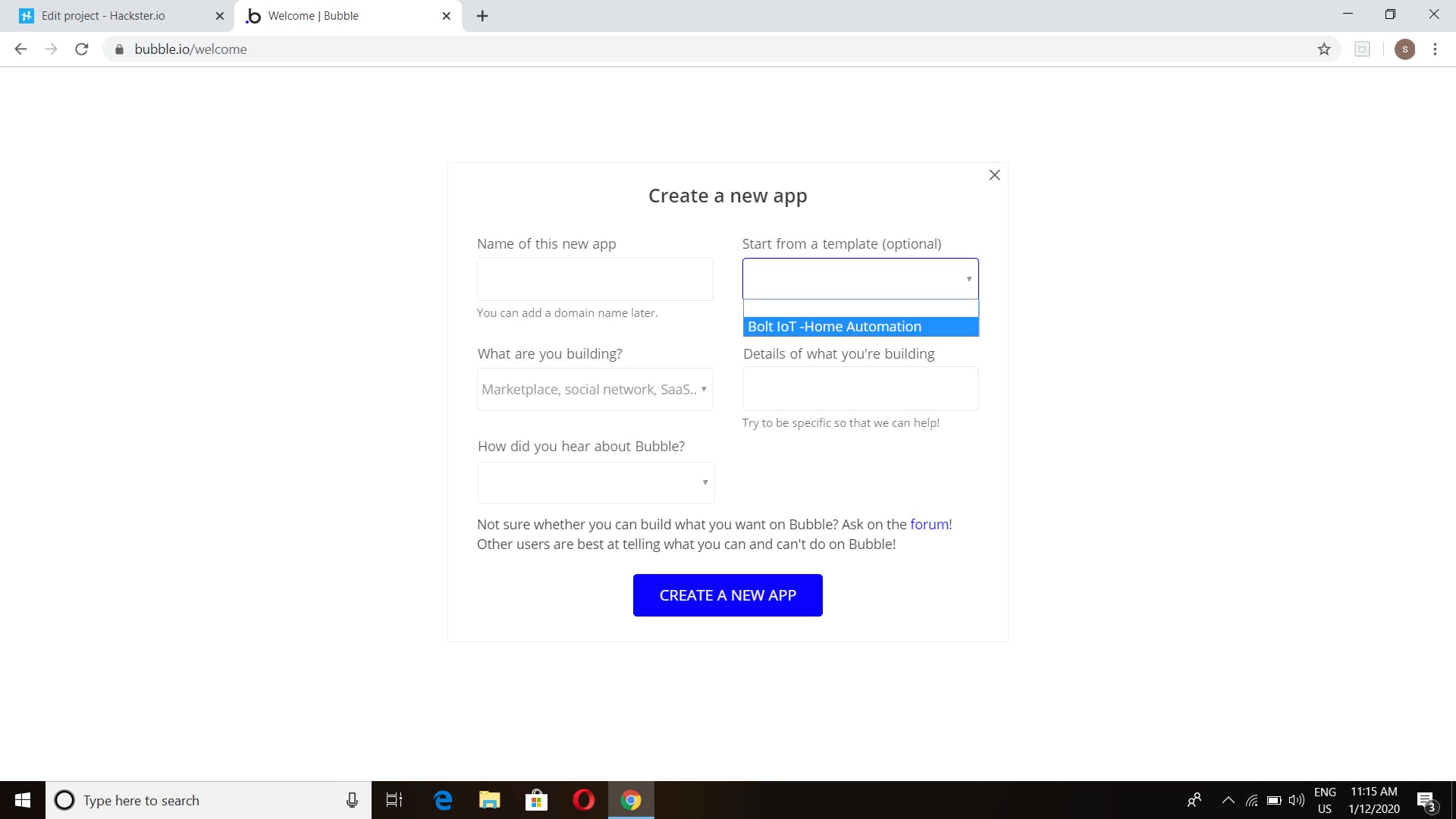
5.現在輸入應用程序名稱,在它的右側將有一個用于添加模板的選項。單擊它并放置 BOLT-IOT AUTOMATION 并單擊以創建應用程序。
?
?
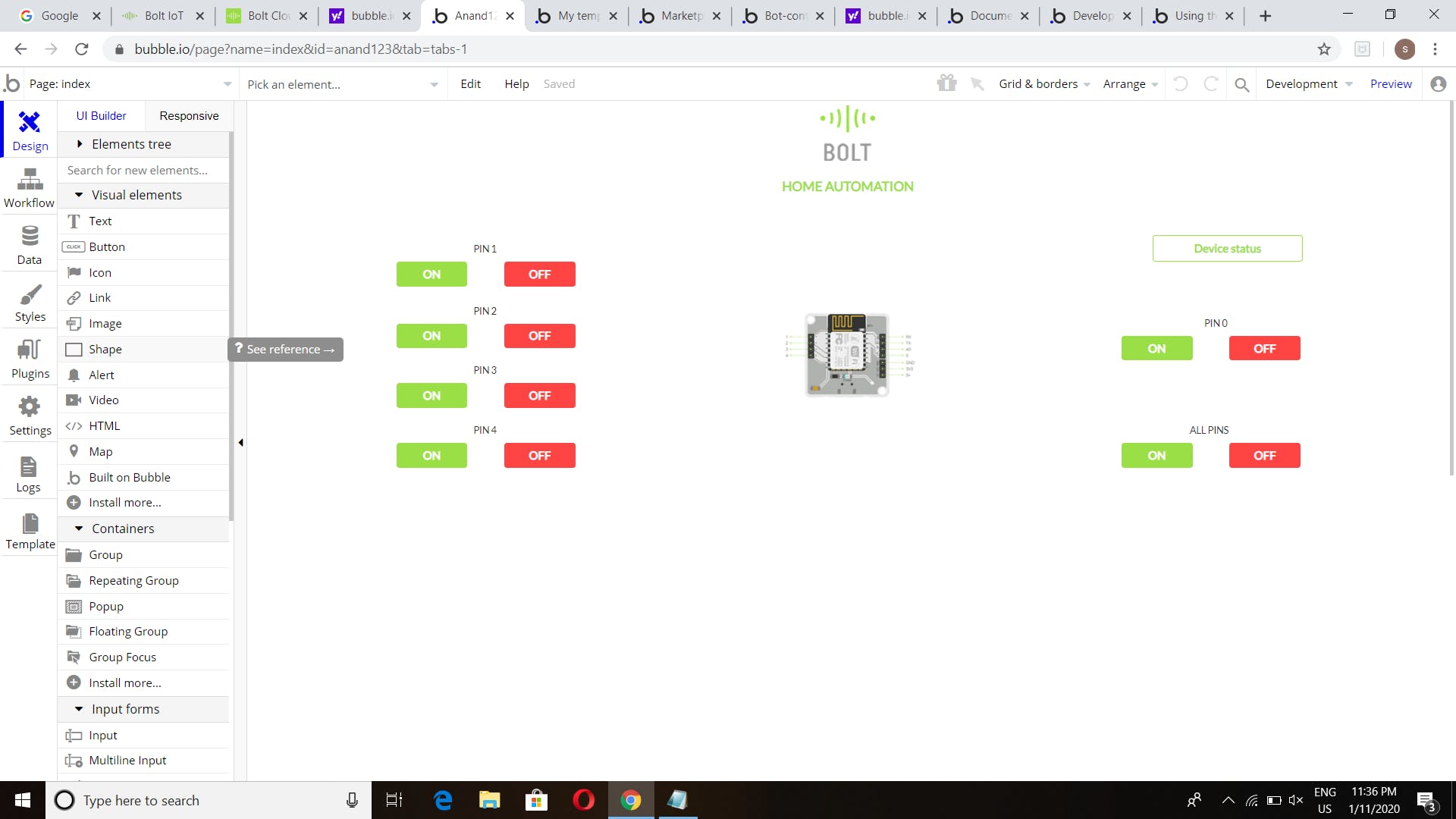
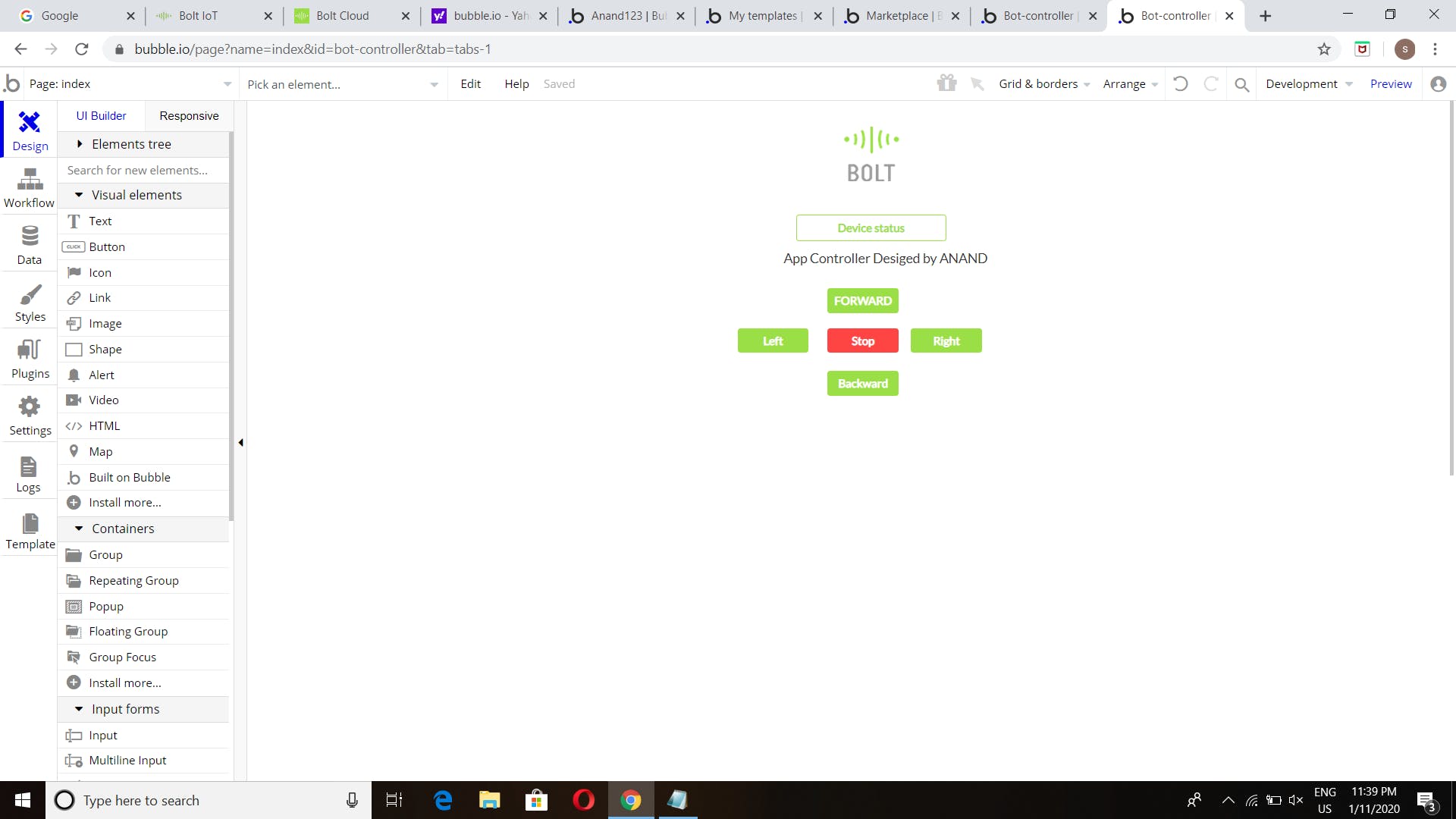
6.現在你會看到令人興奮的功能,即如果你想通過移動按鈕等來改變你的應用程序的設計,已經有一個應用程序。
?
?
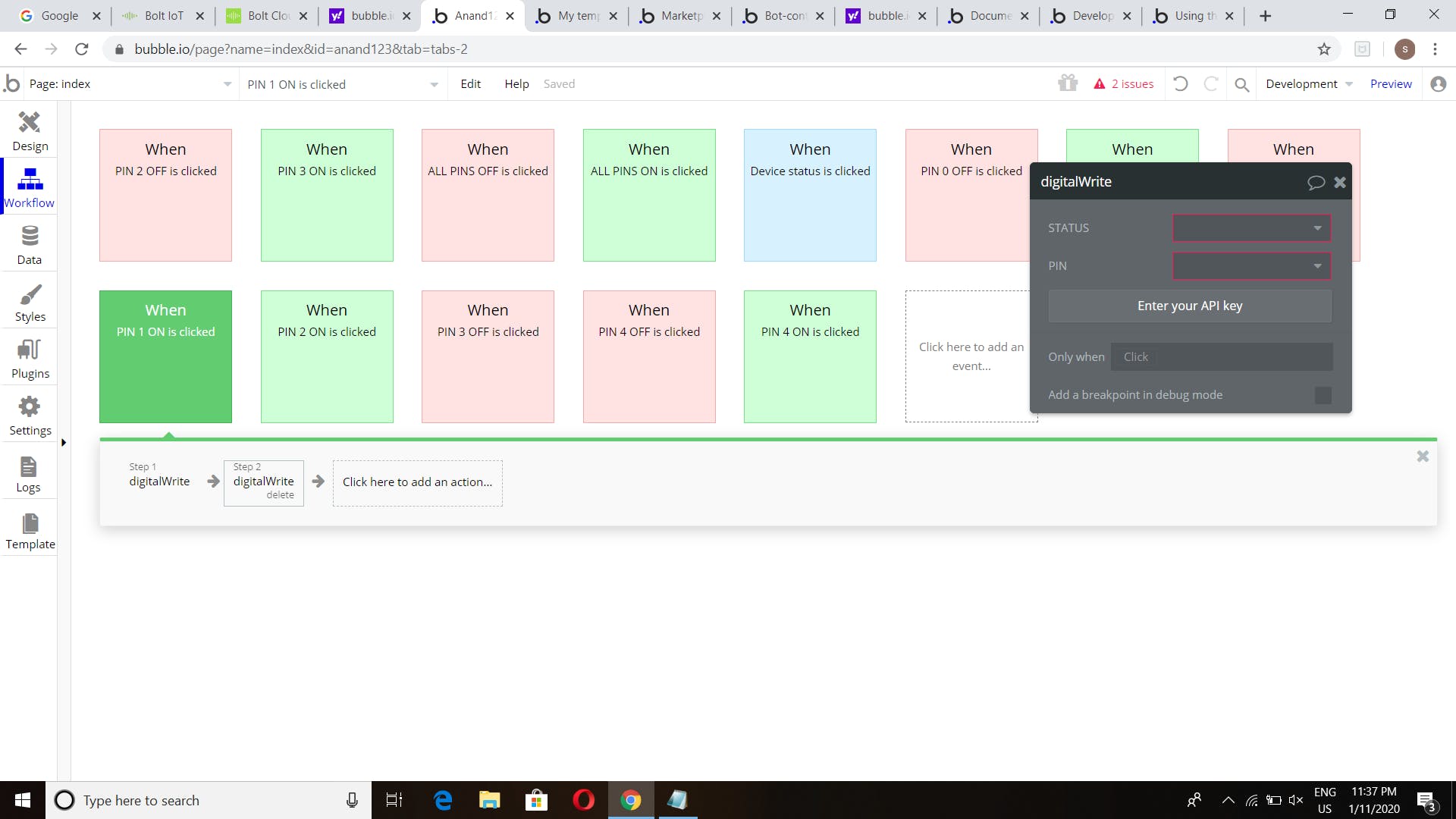
7.現在這一步很重要,因為我們要將我們的硬件鏈接到我們的軟件。
轉到工作場所(在屏幕左側)現在你會看到很多
框(不要害怕它很簡單)。只需單擊框 1(單擊 pin 1 ON 時),您會看到右側會出現一個框,要求您寫下名稱,只需向前寫。
?
?
?
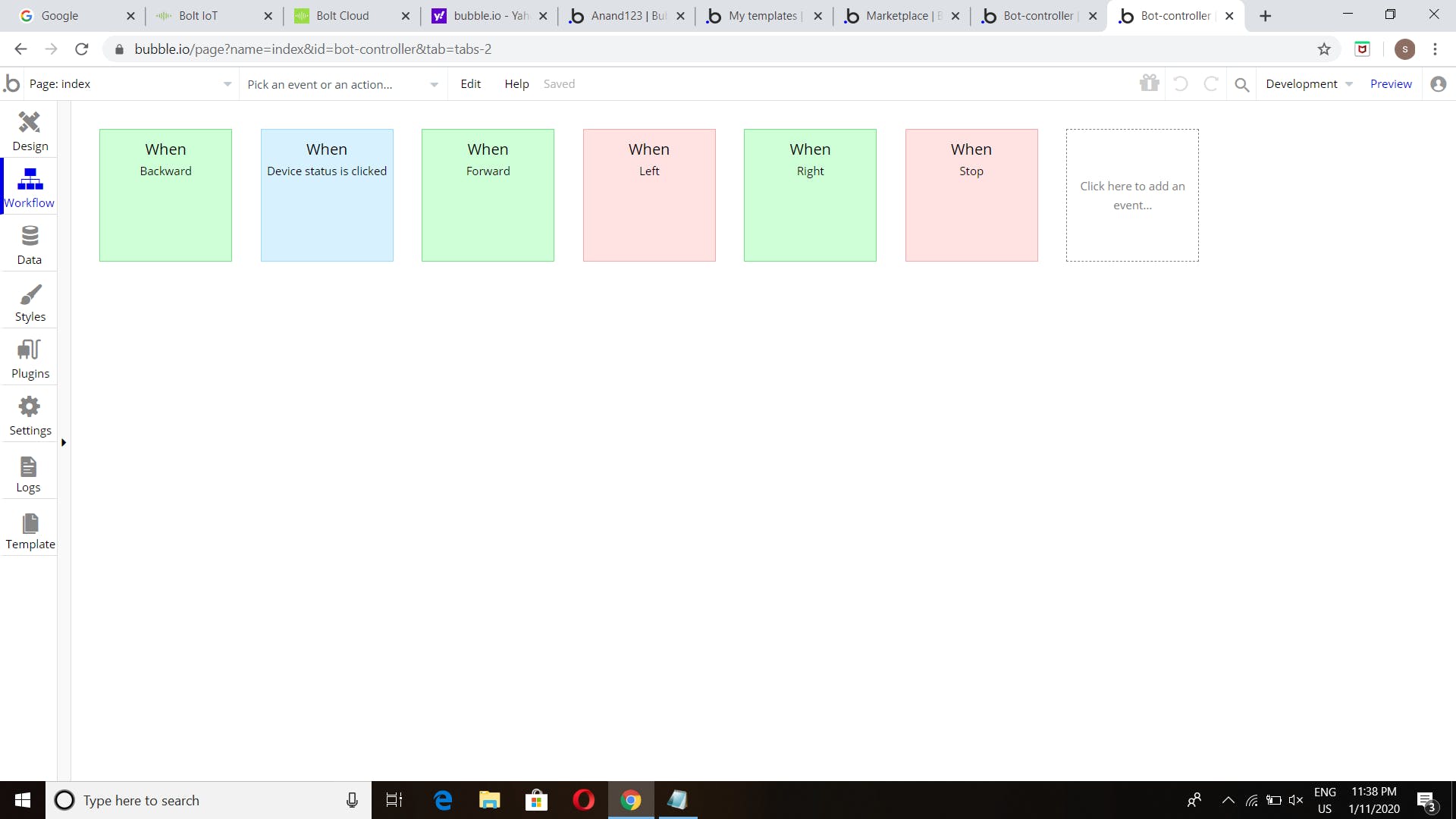
8.現在我們要根據給定的命令給出管腳的狀態
在第七步之后,您將在框 1 下方有一個框,它將被寫為向前,箭頭將指向右側,只需轉到箭頭并右鍵單擊它,然后插入,然后數字寫入,現在再次出現一個框正確并詢問您的密碼和密碼狀態(高或低)。向右、向左、向前、向后移動的方法相同,只是引腳編號和狀態會發生變化。
特定動作的 PIN 狀態和 PIN 編號
*正向-(引腳 1、4 - 高電平),(引腳 2、3 - 低電平)
*左-(引腳 1 - 高電平),(引腳 2、3、4 - 低電平)
*右-(引腳 4 - 高),(引腳 1、3、4 - 低)
*向后-(引腳 2、3 - 高電平),(引腳 1、4 - 低電平)
*停止 -(引腳 1、2、3、4 - 低電平)
?
?
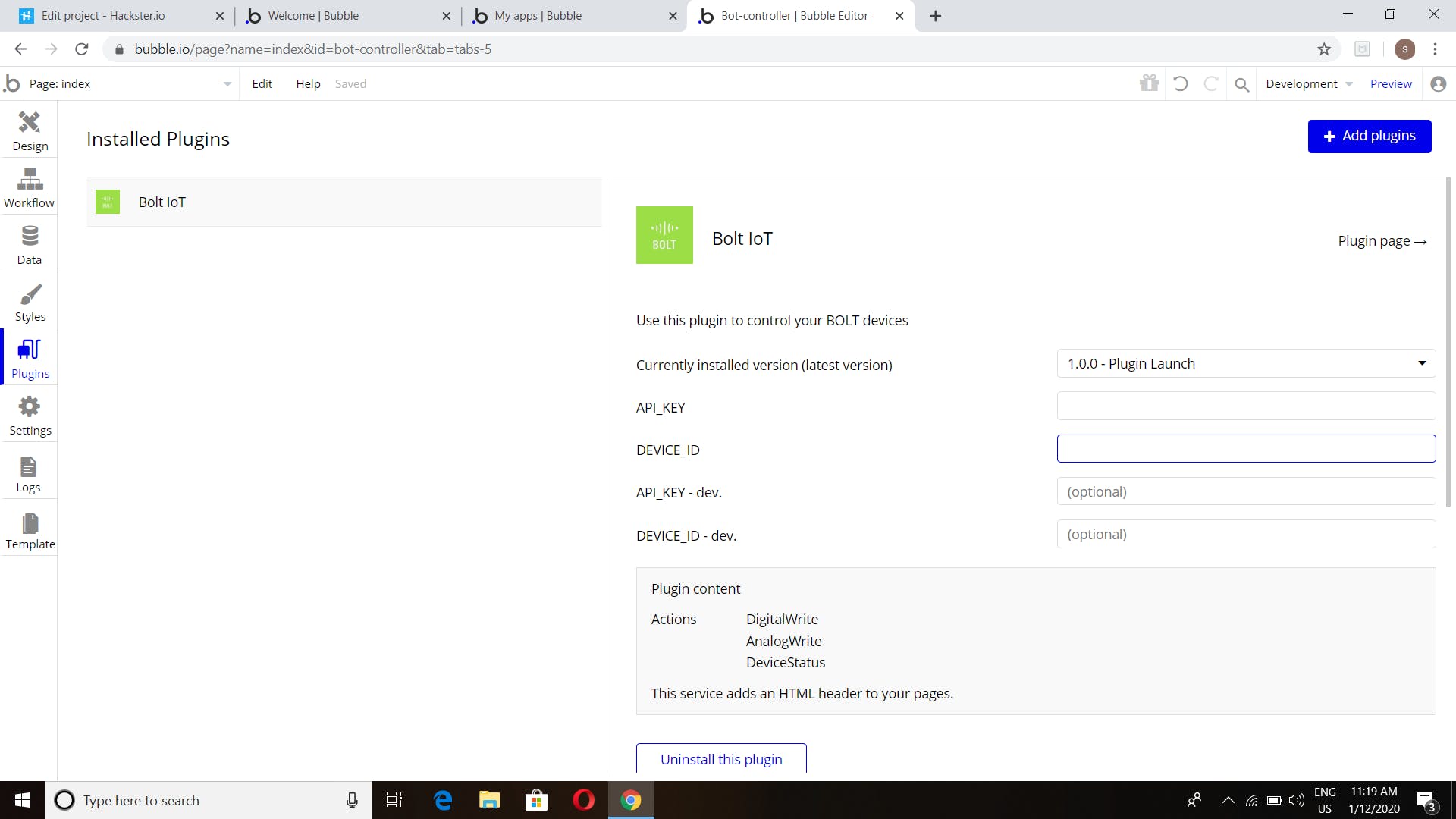
9.現在轉到插件并將您的 API 密鑰和設備 ID 添加到其中。
?
?
?
10.恭喜您的應用已準備就緒
確保您的螺栓已連接到互聯網(檢查綠燈)
項目中面臨的問題
1.由于API的命中次數有限,所以在制作的同時要確保沒有越界。
2.可能會出現Bolt wifi模塊連接不上wifi的情況。只需移除外部電源并將其連接到 PC,然后重新連接到外部電源。
3. 在項目期間,我的電機驅動器運行不佳,因此運動不是非常快速和高效,并且還向電機驅動器施加足夠的功率以使其正常運行。
最后項目圓滿完成_ _
- 使用Zerynth應用程序控制電動氣動電路
- KUKA機器人編程 0次下載
- 可以用手機應用程序控制的中型四足機器人
- 基于ESP32的藍牙控制機器人 0次下載
- 基于Arduino UNO的語音控制機器人 6次下載
- 手指在應用程序上機器人
- Android應用程序控制的機器人車
- 基于DSP控制器的油氣安全智能巡檢機器人 40次下載
- 基于DSP和PC的農業機器人控制系統 17次下載
- 基于DSP的排險機器人車體控制系統 14次下載
- 基于DSP芯片的足球機器人實現與設計 26次下載
- 機器人PID控制概述 27次下載
- 智能汽車機器人的程序免費下載 4次下載
- 機器人設計教程之機器人控制和決策子系統 23次下載
- 機器人控制程序(舵機型) 16次下載
- 如何使用PLC控制機器人 794次閱讀
- VASS 標準機器人的附加功能 699次閱讀
- 讀取機器人程序中的變量 865次閱讀
- 利用STM32實現自平衡機器人功能項目 873次閱讀
- 基于STM32的自平衡機器人設計 803次閱讀
- KUKA機器人CELL程序分析 2817次閱讀
- 機器人程序中斷與相應的恢復方式 4717次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 移動機器人控制系統設計與仿真 3433次閱讀
- 機器人十大流行編程語言的介紹及機器人編程系統以及操作方法 4.2w次閱讀
- 機器人控制系統的基本單元與機器人控制系統的特點分析 1w次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 2使用TL431設計電源
- 0.67 MB | 2次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統
- 0.85 MB | 1次下載 | 1 積分
- 5LabVIEW環形控件
- 0.01 MB | 1次下載 | 1 積分
- 6PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 751單片機核心板原理圖
- 0.12 MB | 1次下載 | 5 積分
- 8BP2879DB支持調光調滅的非隔離低 PF LED 驅動器
- 1.44 MB | 1次下載 | 免費
本月
- 1開關電源設計原理手冊
- 1.83 MB | 54次下載 | 免費
- 2FS5080E 5V升壓充電兩串鋰電池充電管理IC中文手冊
- 8.45 MB | 23次下載 | 免費
- 3DMT0660數字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 12次下載 | 免費
- 5ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 6TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 7STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 8基于MSP430FR6043的超聲波氣體流量計快速入門指南
- 2.26MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監
工商網監
評論