 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
該項(xiàng)目演示了如何快速制作一個(gè)簡(jiǎn)單的 WiFi 遙控 4 輪移動(dòng)機(jī)器人,該機(jī)器人具有安裝在伺服驅(qū)動(dòng)的平移和傾斜組件上的板載 WiFi 攝像頭。
該項(xiàng)目使用基于 CASP 模型的編程工具來(lái)完成軟件實(shí)現(xiàn)。 htm
程序
步驟 1. 按照下面“硬件開(kāi)發(fā)”部分中的描述構(gòu)建硬件。請(qǐng)注意,本項(xiàng)目推薦使用 CASP 0.9.5.1 及以上版本。
第 3 步:在此鏈接https://aadhuniklabs.com/casp/casp_web_projects/robotics/01_rc_robot.zip下載關(guān)于“帶車載攝像頭的基本遙控移動(dòng)機(jī)器人”的示例項(xiàng)目,并按照“軟件開(kāi)發(fā)”中提到的步驟進(jìn)行操作部分。
第 4 步:可能需要按照“調(diào)整”部分所述進(jìn)行一些調(diào)整,以調(diào)整軟件以匹配您開(kāi)發(fā)的硬件。
第 5 步:最后,控制移動(dòng)流動(dòng)站的鍵盤(pán)和鼠標(biāo)控件在控制方法部分進(jìn)行了描述。您可以更改本機(jī)模型中“rc_control”自定義塊中的代碼,以根據(jù)您的喜好修改控制鍵。請(qǐng)通過(guò)https://aadhuniklabs.com/contact寫(xiě)信給我們,了解與該項(xiàng)目相關(guān)的任何疑問(wèn)和建議。
硬件開(kāi)發(fā)
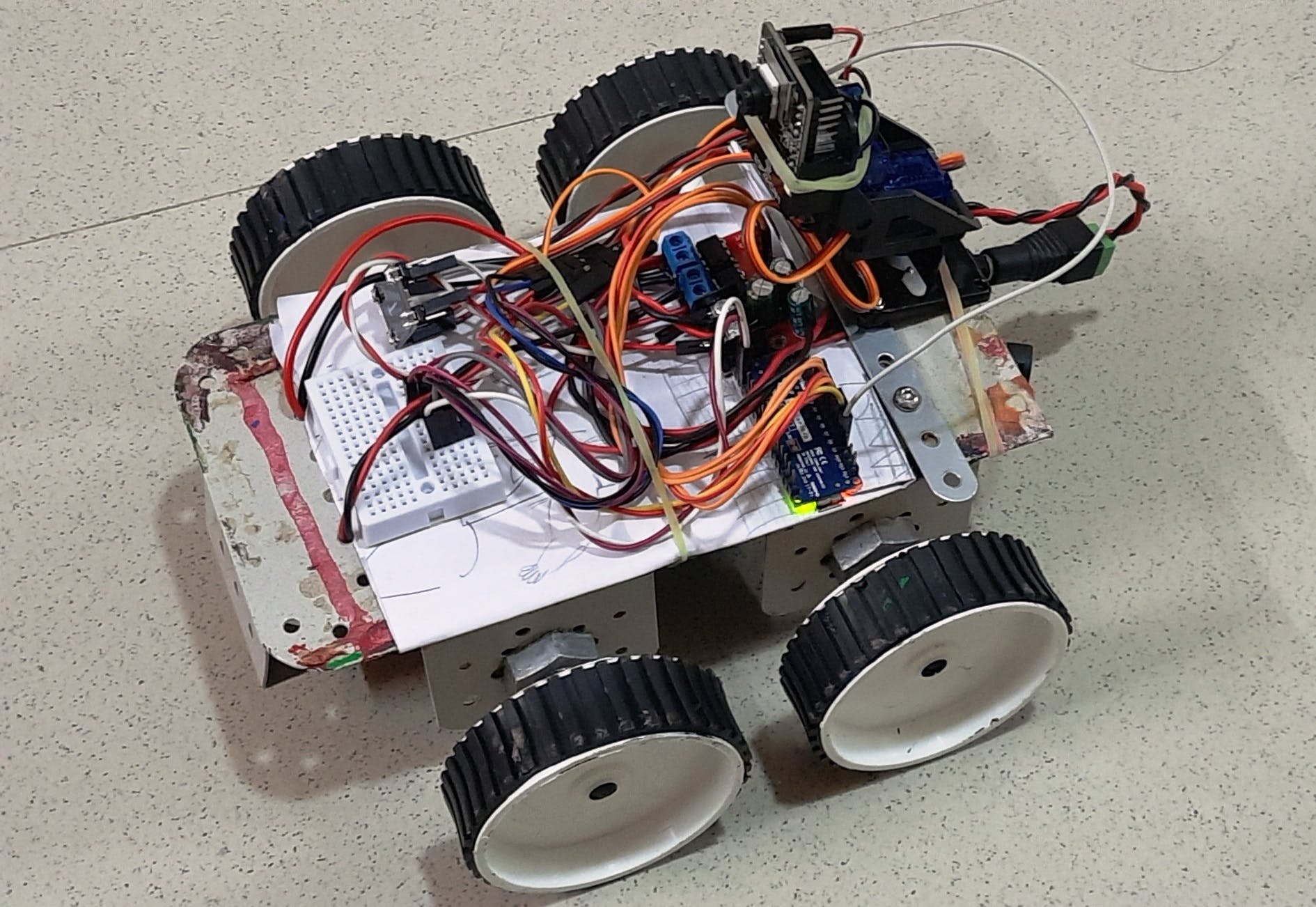
四個(gè)直流電機(jī)與輪子一起安裝在合適的金屬底架上。平移和傾斜組件(配備兩個(gè)微型伺服系統(tǒng))安裝在基架的合適位置(最好朝向機(jī)器人基架的后端)。12V 電池安裝在底架下方。所需的電子模塊適當(dāng)?shù)胤胖迷诘准苌希凑铡笆疽鈭D”部分所示的連接圖進(jìn)行連接。典型布置如下圖所示。
電子部分由 Arduino Nano RP2040 Connect 或 Raspberry Pi Pico W 或 ESP32 組成,用作主要微控制器,用于控制所有必需的機(jī)器人功能并通過(guò)板載 WiFi 與主機(jī) PC 通信。
ESP32-CAM 模塊上的閃光燈在弱光條件下通過(guò) Arduino Nano RP2040 微控制器從主機(jī) PC 手動(dòng)控制。
6V 至 12V 電池用于為機(jī)器人上的整個(gè)電路供電。6V/12V 至 5V DC 降壓轉(zhuǎn)換器用于提供所需的 5V 電源,為微控制器、伺服系統(tǒng)和 ESP32 攝像頭模塊供電。
軟件開(kāi)發(fā)
A)配置 ESP32 攝像頭
在項(xiàng)目中使用 ESP32 攝像頭之前,應(yīng)使用有效的 IP 地址對(duì)其進(jìn)行正確編程。有關(guān)如何對(duì)模塊進(jìn)行編程的詳細(xì)信息,請(qǐng)參閱我們的ESP32-CAM 示例。用戶還可以參考 Internet 上有關(guān)此主題的豐富資料。
CASP 軟件用于為 Arduino 微控制器目標(biāo)和主機(jī) PC 快速開(kāi)發(fā)模型。因此,開(kāi)發(fā)了兩種模型以實(shí)現(xiàn)預(yù)期目標(biāo)。
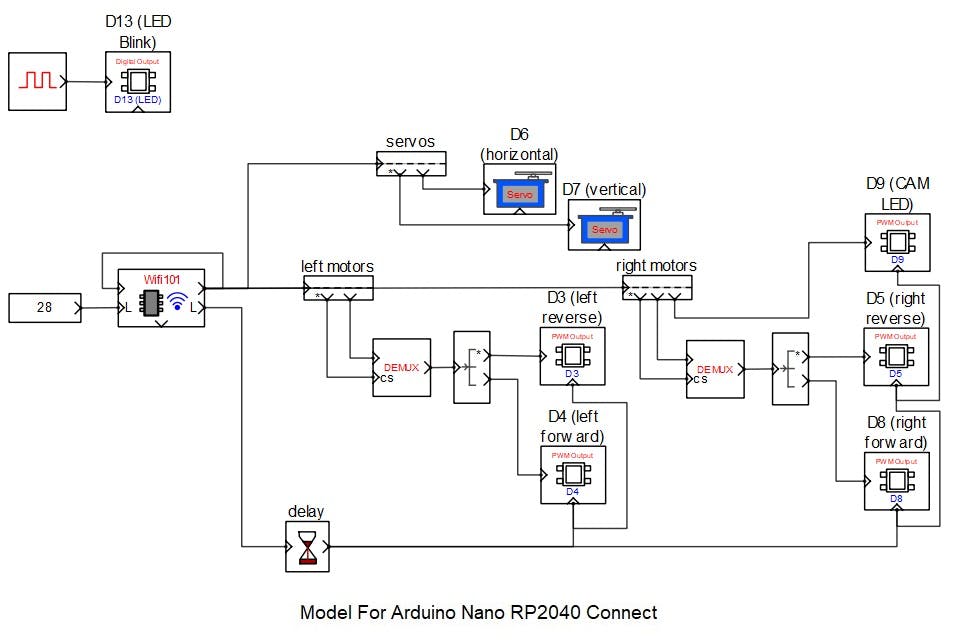
B)在 Arduino Nano RP2040 Connect、Raspberry Pi Pico W 和 ESP32 上運(yùn)行的目標(biāo)模型包括
1. 表示系統(tǒng)正在運(yùn)行的閃爍邏輯。
2. WiFi101 塊從主機(jī) PC 接收所需的控制信號(hào)。
3. 映射到微控制器引腳的 PWM 和伺服模塊。
4. 延時(shí)塊,用于在通信錯(cuò)誤期間或主機(jī)未連接時(shí)重置 PWM 塊的輸出。
以下是正確編程目標(biāo)板的步驟。ESP32 Camera 的 IP 地址應(yīng)在此塊的塊參數(shù)中輸入。它還配置為輸出鍵盤(pán)和鼠標(biāo)信號(hào)。
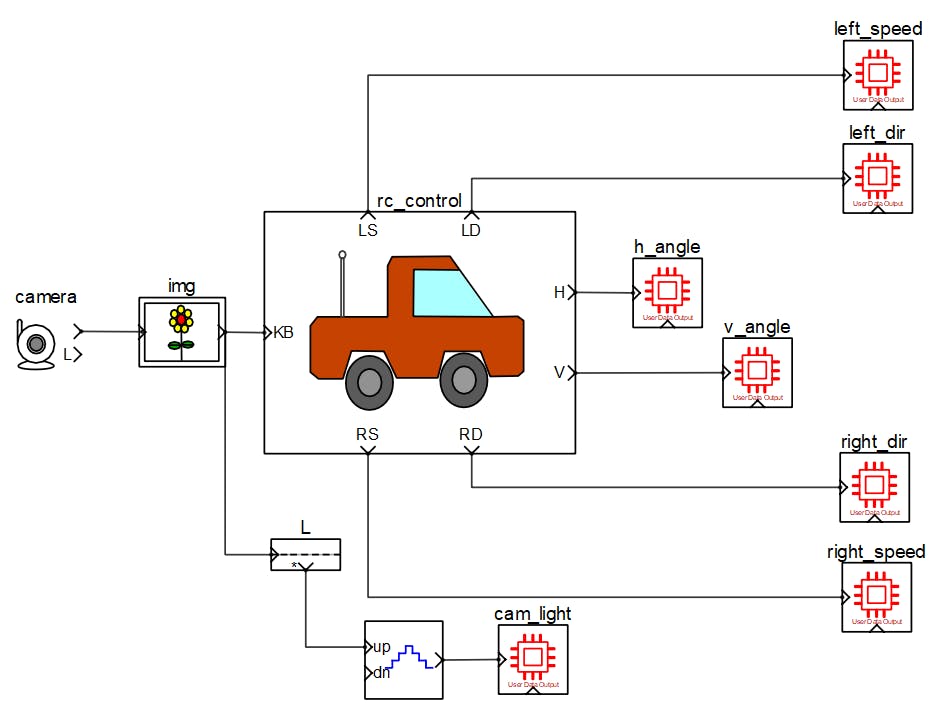
3. RC 控制塊:自定義塊,接收來(lái)自圖像顯示塊的鍵盤(pán)和鼠標(biāo)信號(hào),并產(chǎn)生合適的控制信號(hào)來(lái)控制機(jī)器人運(yùn)動(dòng)和頭部(云臺(tái))運(yùn)動(dòng)。
4. 通過(guò) WiFi 通信通道映射到目標(biāo)模型的 GPIO 塊。
以下是在主機(jī)PC上運(yùn)行本機(jī)模型的步驟
1. 在繼續(xù)之前,主機(jī) PC 應(yīng)連接到與設(shè)備連接的同一網(wǎng)絡(luò)。
2. 加載“rc_native”項(xiàng)目。
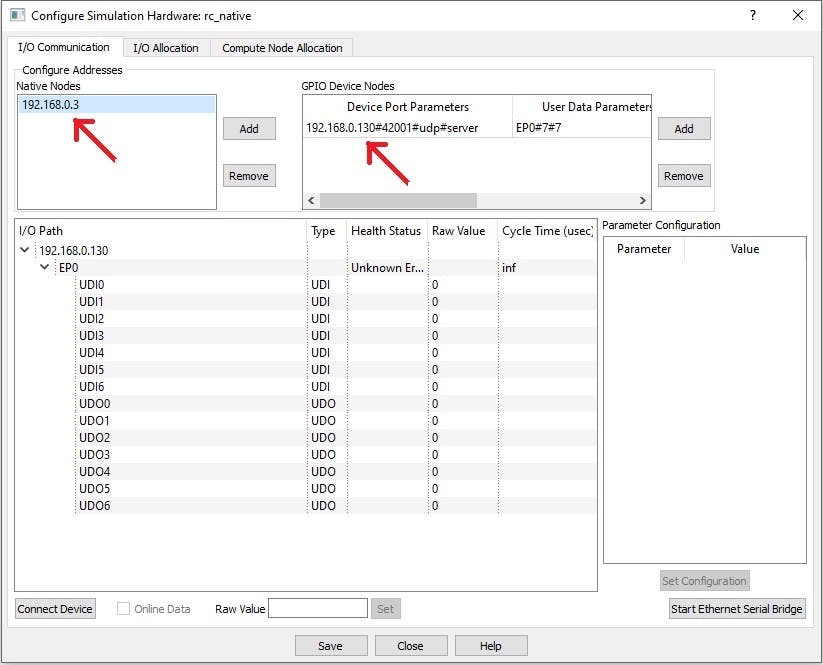
3. 點(diǎn)擊Home->Simulation->Configure Simulation IO 菜單項(xiàng)。
4. 將打開(kāi)“配置仿真硬件”窗口。在 Native Nodes 和 GPIO Device Nodes 下,將下圖中標(biāo)記的 IP 地址(通過(guò)雙擊該項(xiàng))更改為各自的本地和設(shè)備 IP 地址。
。
調(diào)整
1. 當(dāng)按下 W 和 S 時(shí),輪子電機(jī)連接可以反轉(zhuǎn)以向前或向后移動(dòng)。
2. 開(kāi)發(fā)了電機(jī)正反轉(zhuǎn)產(chǎn)生邏輯,以配合項(xiàng)目中使用的電機(jī)驅(qū)動(dòng)IC ieTA6586。如果使用其他驅(qū)動(dòng)IC,用戶可以適當(dāng)修改邏輯。
3. 對(duì)于 rc_control 塊參數(shù)中指定的默認(rèn)角度,伺服電機(jī)可能需要進(jìn)行一些對(duì)齊以面向機(jī)器人前進(jìn)方向。
4. 基本速度、速度限制和其他與導(dǎo)航相關(guān)的參數(shù)可從 rc_control 塊參數(shù)中調(diào)整。
控制方法
1. 上面顯示的模擬面板窗口在激活時(shí)接受鍵盤(pán)和鼠標(biāo)輸入。
2. 用戶可以使用鍵盤(pán)按鍵W——向前移動(dòng),S——向后移動(dòng),A——以中心向左旋轉(zhuǎn),D——以中心向右旋轉(zhuǎn)。
3. 組合鍵W/S & A/D 可以在前進(jìn)或后退時(shí)左右轉(zhuǎn)彎。
4. 可以使用Page Up & Page Down 鍵調(diào)整速度。
5. 頭部位置控制的垂直和水平伺服角度(從-90 到+90 度)可以通過(guò)鼠標(biāo)移動(dòng)來(lái)控制。
6. 鍵“G”用于將兩個(gè)舵機(jī)定位在默認(rèn)角度。
7. 鍵“L”用于打開(kāi)/關(guān)閉 ESP32 相機(jī)的閃光 LED 燈。
- 如何制作Arduino智能移動(dòng)機(jī)器人
- 移動(dòng)機(jī)器人路徑規(guī)劃與運(yùn)動(dòng)控制 10次下載
- 如何使用Matlab和VR技術(shù)實(shí)現(xiàn)移動(dòng)機(jī)器人的建模和仿真 13次下載
- 移動(dòng)機(jī)器人的導(dǎo)航定位和地圖構(gòu)建技術(shù)綜述 22次下載
- 移動(dòng)機(jī)器人的關(guān)鍵技術(shù)有哪些 17次下載
- 如何使用單目視覺(jué)實(shí)現(xiàn)移動(dòng)機(jī)器人的導(dǎo)航方法 20次下載
- 如何才能實(shí)現(xiàn)移動(dòng)機(jī)器人的導(dǎo)航定位和地圖構(gòu)建技術(shù) 22次下載
- 如何通過(guò)測(cè)程法進(jìn)行四輪全向移動(dòng)機(jī)器人定位 13次下載
- 使用Matlab和VR技術(shù)實(shí)現(xiàn)移動(dòng)機(jī)器人的建模及仿真的方案說(shuō)明 10次下載
- 移動(dòng)機(jī)器人技術(shù)及其分類和空間定位技術(shù)詳解 16次下載
- 移動(dòng)機(jī)器人的分類與移動(dòng)機(jī)器人技術(shù)研究現(xiàn)狀和未來(lái)發(fā)展的分析 13次下載
- 移動(dòng)機(jī)器人導(dǎo)航 5次下載
- 輪式移動(dòng)機(jī)器人WMR的運(yùn)動(dòng)分析 33次下載
- 基于遙操作和局部自主的移動(dòng)機(jī)器人越障
- 基于達(dá)芬奇的移動(dòng)機(jī)器人開(kāi)發(fā)平臺(tái)設(shè)計(jì)
- 用于ROS移動(dòng)機(jī)器人高集成電源解決方案(一) 948次閱讀
- 采用Mecanum式全向移動(dòng)輪及模塊化實(shí)現(xiàn)全方位移動(dòng)機(jī)器人設(shè)計(jì) 3073次閱讀
- 基于ARM處理器和CPLD技術(shù)實(shí)現(xiàn)智能移動(dòng)機(jī)器人系統(tǒng)設(shè)計(jì) 1047次閱讀
- 移動(dòng)機(jī)器人是如何定位的 4399次閱讀
- 移動(dòng)機(jī)器人控制系統(tǒng)的發(fā)展方向? 1411次閱讀
- 移動(dòng)機(jī)器人控制系統(tǒng)設(shè)計(jì)與仿真 3433次閱讀
- 仙知機(jī)器人自主研發(fā)用于移動(dòng)機(jī)器人應(yīng)用專業(yè)級(jí)客戶端軟件Roboshop 6069次閱讀
- 移動(dòng)機(jī)器人的機(jī)構(gòu)與分類分析 8064次閱讀
- 拆解移動(dòng)機(jī)器人視覺(jué)算法 5534次閱讀
- 如何區(qū)分機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人? 6828次閱讀
- 關(guān)于被動(dòng)同心轉(zhuǎn)向式多履帶全向移動(dòng)機(jī)器人的設(shè)計(jì) 8937次閱讀
- 自主移動(dòng)機(jī)器人的定位與地圖創(chuàng)建(SLAM)關(guān)鍵性問(wèn)題 1908次閱讀
- 基于LPC2119的自主式移動(dòng)機(jī)器人設(shè)計(jì) 1529次閱讀
- 基于FPGA技術(shù)的全方位移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的方案設(shè)計(jì) 1176次閱讀
- 小生境遺傳算法的移動(dòng)機(jī)器人路徑優(yōu)化技術(shù) 1218次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論