") 什么是機(jī)器視覺系統(tǒng)?機(jī)器視覺與計(jì)算機(jī)視覺的區(qū)別?
什么是機(jī)器視覺系統(tǒng)?機(jī)器視覺與計(jì)算機(jī)視覺的區(qū)別?
視覺是人類觀察和認(rèn)知世界的重要手段。隨著信息技術(shù)的發(fā)展,人類逐漸把這種技能賦予計(jì)算機(jī)、機(jī)器人或者其他智能機(jī)器,這就是我們今天所要提到的機(jī)器視覺技術(shù)。
目前機(jī)器視覺技術(shù)已經(jīng)實(shí)現(xiàn)了產(chǎn)品化、實(shí)用化,鏡頭、高速相機(jī)、光源、圖像軟件、圖像采集卡、視覺處理器等相關(guān)產(chǎn)品功能日益完善。機(jī)器視覺技術(shù)在信息化時代正扮演著越來越重要的角色。
到如今,中國已經(jīng)成為世界機(jī)器視覺發(fā)展最為活躍地區(qū),應(yīng)用范圍涵蓋了工業(yè)、農(nóng)業(yè)、醫(yī)藥、軍事、航天、氣象等國民經(jīng)濟(jì)各個行業(yè)。雖然機(jī)器視覺的成長速度非常快,但是還是有很多人對機(jī)器視覺并不了解,今天我們來了解下機(jī)器視覺。
01、什么是機(jī)器視覺系統(tǒng)?
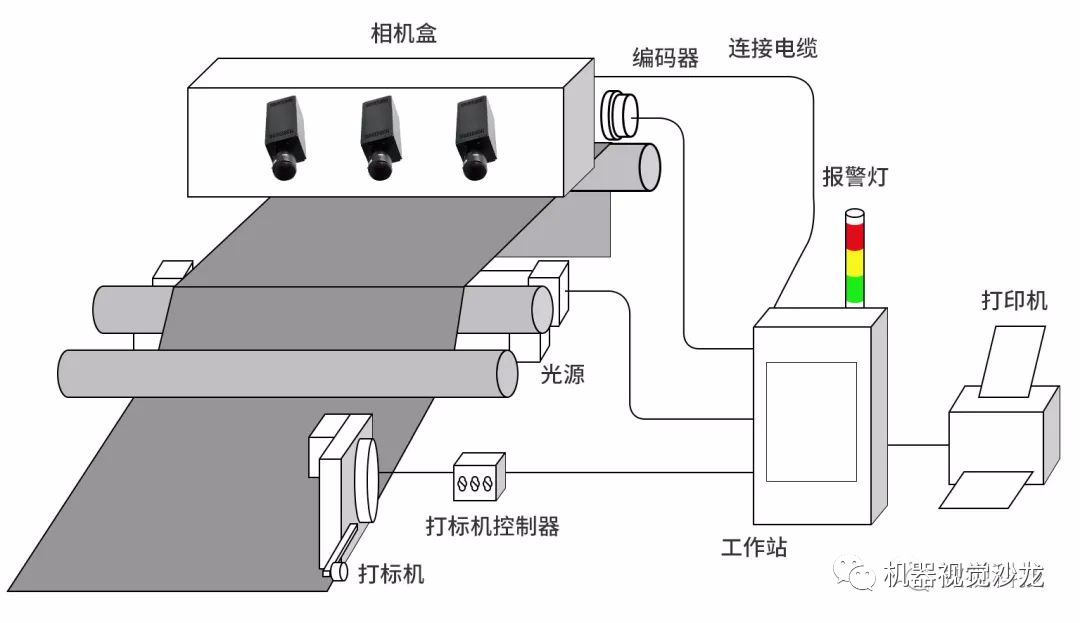
機(jī)器視覺就是用機(jī)器代替人眼來做測量和判斷。機(jī)器視覺系統(tǒng)是指通過機(jī)器視覺產(chǎn)品(即圖像攝取裝置,分CMOS和CCD兩種)將被攝取目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號;圖像系統(tǒng)對這些信號進(jìn)行各種運(yùn)算來抽取目標(biāo)的特征,進(jìn)而根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動作。
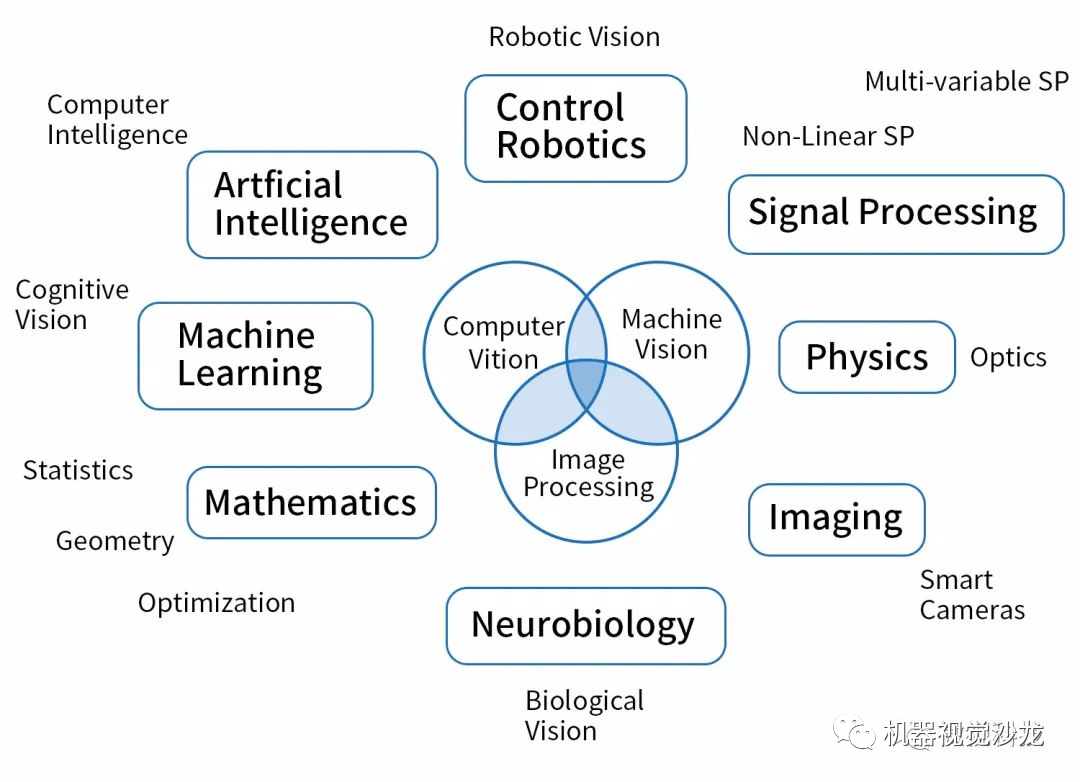
與計(jì)算機(jī)視覺相比,機(jī)器視覺偏重于計(jì)算機(jī)視覺技術(shù)工程化,能夠自動獲取和分析特定的圖像,對準(zhǔn)確度和處理速度要求都比較高,一般而言,計(jì)算機(jī)視覺多用來識別“人”,而機(jī)器視覺則多用來識別“物”。
具體來講,計(jì)算機(jī)視覺應(yīng)用的場景相對復(fù)雜,要識別的物體類型也多,形狀不規(guī)則、規(guī)律性不強(qiáng),有時甚至很難用客觀量作為識別的依據(jù),比如識別年齡、性別,對于光線、距離、角度等條件要求較低;而對準(zhǔn)確度和處理速度要求都比較高,一般機(jī)器視覺的分辨率遠(yuǎn)高于計(jì)算機(jī)視覺,而且往往要求實(shí)時,處理速度非常關(guān)鍵。
02
機(jī)器視覺的優(yōu)勢
機(jī)器視覺系統(tǒng)具有高效率、高度自動化的特點(diǎn),可以實(shí)現(xiàn)很高的分辨率精度和速度。機(jī)器視覺系統(tǒng)與被檢測對象無接觸,安全可靠。人工檢測與機(jī)器視覺自動檢測的主要區(qū)別有:

03
系統(tǒng)組成
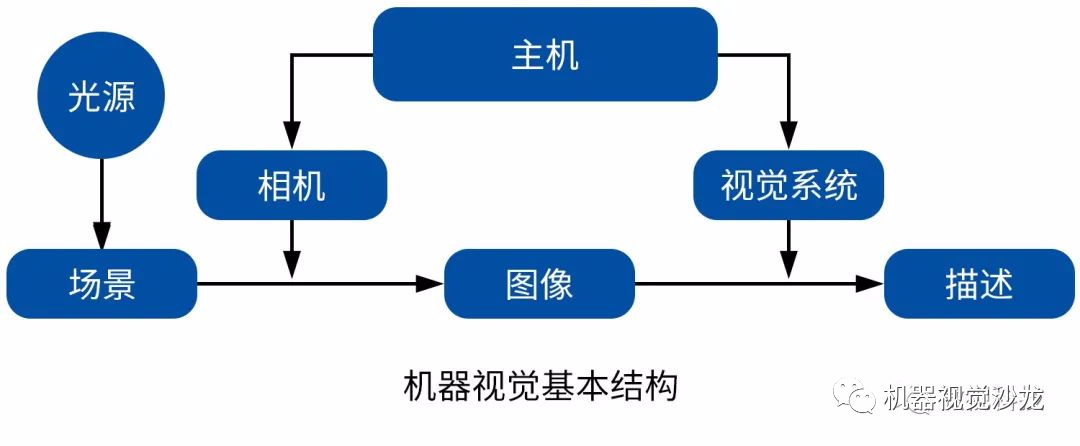
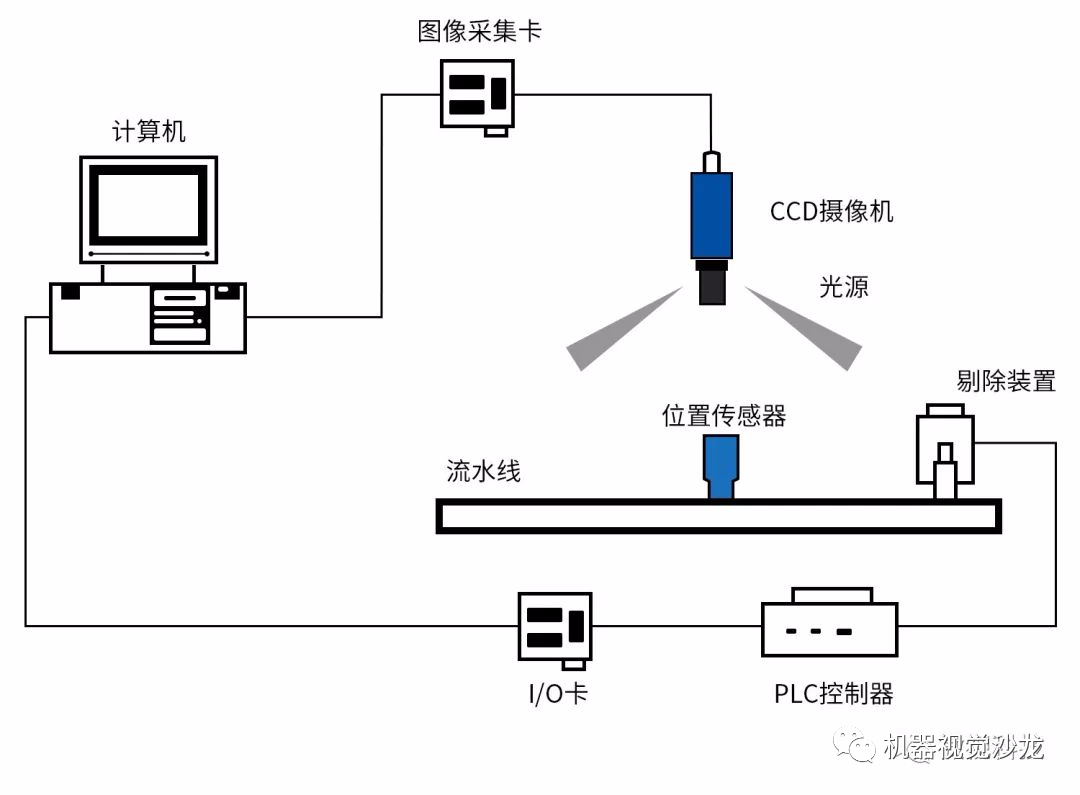
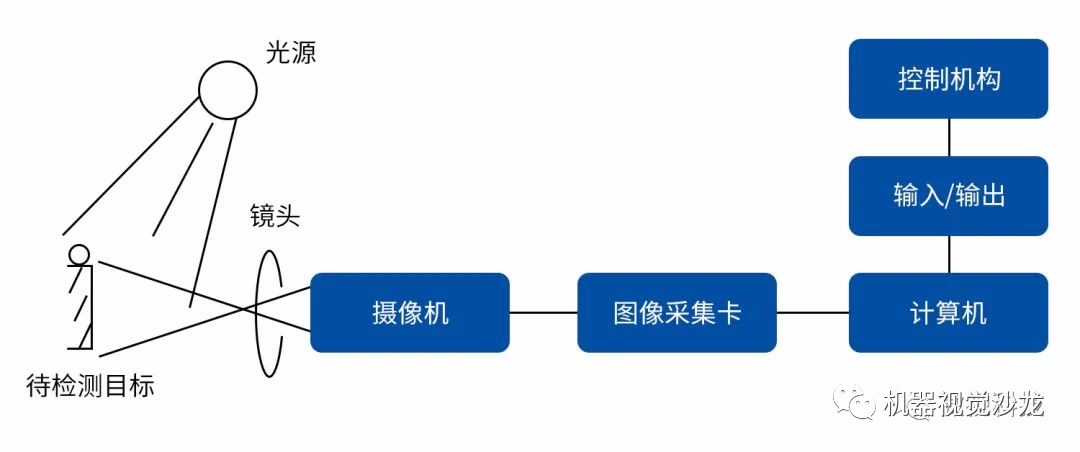
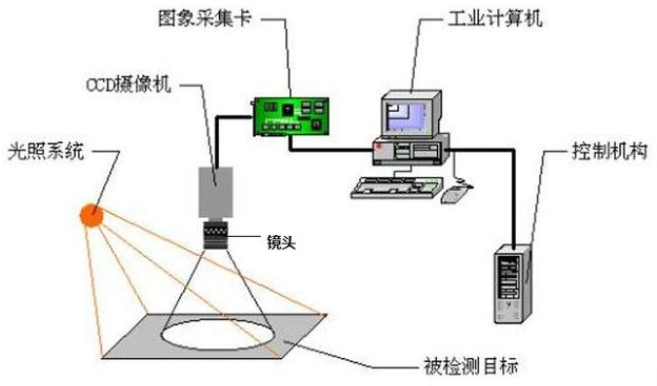
一個典型的機(jī)器視覺系統(tǒng)包括以下部分:
(1)照明
照明是影響機(jī)器視覺系統(tǒng)輸入的重要因素,它直接影響輸入數(shù)據(jù)的質(zhì)量和應(yīng)用效果。由于沒有通用的機(jī)器視覺光源照明設(shè)備,所以針對每個特定的應(yīng)用實(shí)例,要選擇相應(yīng)的照明裝置,以達(dá)到最佳的效果。
光源可分為可見光和不可見光,常見的幾種可見光源有白熾燈、日光燈、水銀燈和鈉光燈。可見光的缺點(diǎn)是光能不穩(wěn)定。所以如何使光能在一定的程度上保持穩(wěn)定,是目前急需解決的問題;另一方面,環(huán)境光有可能影響圖像的質(zhì)量,所以可采用加防護(hù)屏的方法來減少環(huán)境光的影響。
照明系統(tǒng)按照照射方法可分為:背向照明、前向照明、結(jié)構(gòu)光和頻閃光照明等。其中,背向光照明是被測物放在光源和攝像機(jī)之間,它的優(yōu)點(diǎn)是能獲得高對比度的圖像;前向照明是光源和攝像機(jī)位于被測物的同側(cè),這種方式便于安裝;結(jié)構(gòu)光照明是將光柵或光源等投射到被測物上,根據(jù)它們產(chǎn)生的即便,調(diào)解出被測物體的三維信息。頻閃光照明是將高頻率的光脈沖照射到物體上,攝像機(jī)拍攝要求與光源同步。
(2)鏡頭
工業(yè)鏡頭
FOV(Field Of vision)=所需分辨率*亞像素*相機(jī)尺寸/PRTM(零件測量公差)
選擇鏡頭需要注意:
- 焦距
- 目標(biāo)高度
- 影像高度
- 放大倍數(shù)
- 影像至目標(biāo)的距離
- 中心點(diǎn)/節(jié)點(diǎn)
- 畸變
(3)相機(jī)
按照不同標(biāo)準(zhǔn)可分為:標(biāo)準(zhǔn)分辨率數(shù)字相機(jī)和模擬相機(jī)等。
要根據(jù)不同的實(shí)際應(yīng)用場合選不同的相機(jī)和高分辨率相機(jī):線掃描CCD和面陣CCD、單色相機(jī)和彩色相機(jī)。
(4)圖像采集卡
圖像采集卡只是完整的機(jī)器視覺系統(tǒng)的一個部件,但是它扮演一個非常重要的角色;圖像采集卡直接決定了攝像頭的接口:黑白、彩色、模擬、數(shù)字等。
比較典型的是PCI或AGP兼容的捕獲卡,可以將圖像迅速地傳送到計(jì)算機(jī)存儲器進(jìn)行處理,有些采集卡有內(nèi)置的多路開關(guān)。例如,可以連接8個不同的攝像機(jī),然后告訴采集卡采用那一個相機(jī)抓拍到的信息。有些采集卡有內(nèi)置的數(shù)字輸入以觸發(fā)采集卡進(jìn)行捕捉,當(dāng)采集卡抓拍圖像時數(shù)字輸出口就觸發(fā)閘門。
(5)視覺處理器
視覺處理器集采集卡與處理器與一體。以往計(jì)算機(jī)速度較慢時,采用視覺處理器加快視覺處理任務(wù),現(xiàn)在由于采集卡可以快速傳輸圖像到存儲器,而且計(jì)算機(jī)也快多了,所以現(xiàn)在視覺處理器用的較少了。
04
工業(yè)鏡頭
工業(yè)鏡頭的接口:
| C型: | C型接口鏡頭與攝像機(jī)接觸面至鏡頭焦平面(攝像機(jī)CCD光電感應(yīng)處的位置)的距離為17.5mm |
| CS型: | CS型接口距離為12.5mm,CS型鏡頭與CS型攝像機(jī)可以配合使用。C型鏡頭與CS型攝像機(jī)之間增加一個5mm的C/CS轉(zhuǎn)接環(huán)可以配合使用,CS型鏡頭與C型攝像機(jī)無法配合使用。 |
| F型: | 通用型接口,一般適用于焦距大于25mm的鏡頭。any |
05、基本參數(shù)
| 視場: | 即FOV,也叫視野范圍,指觀測物體的可視范圍,也就是充滿相機(jī)采集芯片的物體部分。 |
| 工作距離: | 即WD,指從鏡頭前部到受檢測物體的距離,即清晰成像的表面距離。 |
| 分辨率: | 圖像系統(tǒng)可以測到的受檢驗(yàn)物體上的最小可分辨率特征尺寸,在多數(shù)情況下,視野越小,分辨率越好。 |
| 景深: | 即DOF,物體離最佳焦點(diǎn)較近或比較較遠(yuǎn)時,鏡頭保持所需分辨率的能力。 |
| 焦距 (f): |
是光學(xué)系統(tǒng)中衡量光的聚集或發(fā)散的度量方式,指從透鏡的光心到光聚焦之焦點(diǎn)的距離,也是照相機(jī)中,從鏡片中心到底片或CCD等成像平面的距離。 焦距大小的影響情況:焦距越小,景深越大;焦距越小,畸變越大;焦距越小,漸暈現(xiàn)象越嚴(yán)重,使像差邊緣的照度降低。 |
| 失真: | 又稱為畸變,指被攝物平面內(nèi)的主軸直線,經(jīng)光學(xué)系統(tǒng)成像后變?yōu)榍€,則此光學(xué)系統(tǒng)的成像誤差稱為畸變,畸變像差只影響影像的幾何形狀,而不影響影像的清晰度。 |
| 光圈與F值: | 光圈是一個用來控制鏡頭通光量的裝置,它通常是在鏡頭內(nèi),表達(dá)光圈大小我們是用F值,如f2,f4。 |
06、工業(yè)相機(jī)的選擇要點(diǎn)
(1)視野范圍、光學(xué)放大倍數(shù)及期望的工作距離:在選擇鏡頭時,我們會選擇比被測物體視野稍大一點(diǎn)的鏡頭,有利于運(yùn)動控制。
(2)景深要求:對于對景深有要求的項(xiàng)目,盡可能使用小光圈;在選擇放大倍率的鏡頭時,在項(xiàng)目許可下盡可能選用低倍率鏡頭;如果項(xiàng)目要求比較苛刻時,傾向選擇高景深的尖端鏡頭。
(3)芯片大小和相機(jī)接口:例如2/3鏡頭支持最大的工業(yè)相機(jī)耙面為2/3,它是不能支持1英寸以上的工業(yè)相機(jī)。
(4)注意與光源的配合,選配合適的鏡頭。
(5)可安裝空間:在方案可選擇情況下,讓客戶更改設(shè)備尺寸是不現(xiàn)實(shí)的。
07
機(jī)器視覺的工作原理
機(jī)器視覺檢測系統(tǒng)是采用CCD照相機(jī)將被檢測的目標(biāo)轉(zhuǎn)換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號,圖像處理系統(tǒng)對這些信號進(jìn)行各種運(yùn)算來收取目標(biāo)的特征,如面積、數(shù)量、位置、長度,再根據(jù)預(yù)設(shè)的允許度和其他條件輸出結(jié)果,包括尺寸、角度、個數(shù)、合格/不合格、有/無等,實(shí)現(xiàn)自動識別功能。
08
機(jī)器視覺特點(diǎn)
攝像機(jī)的拍照速度自動與被測物的速度相匹配,拍攝到理想的圖像;
零件的尺寸范圍為2.4mm到12mm,厚度可以不同;
系統(tǒng)根據(jù)操作者選擇不同尺寸的工件,調(diào)用相應(yīng)視覺程序進(jìn)行尺寸檢測,并輸出結(jié)果;
針對不同尺寸的零件,排序裝置和輸送裝置可以精確調(diào)整料道的寬度,使零件在固定路徑上運(yùn)動并進(jìn)行視覺檢測;
機(jī)器視覺系統(tǒng)分辨率達(dá)到2448×2048,動態(tài)檢測精度可以達(dá)到0.02mm;
廢品漏檢率為0;
本系統(tǒng)可通過顯示圖像監(jiān)視檢測過程,也可通過界面顯示的檢測數(shù)據(jù)動態(tài)查看檢測結(jié)果;
具有對錯誤工件及時準(zhǔn)確發(fā)出剔除控制信號、剔除廢品的功能;
系統(tǒng)能夠自檢其主要設(shè)備的狀態(tài)是否正常,配有狀態(tài)指示燈;同時能夠設(shè)置系統(tǒng)維護(hù)人員、使用人員不同的操作權(quán)限;
實(shí)時顯示檢測畫面,中文界面,可以瀏覽幾次不合格品的圖像,具有能夠存儲和實(shí)時察看錯誤工件圖像的功能;
能生成錯誤結(jié)果信息文件,包含對應(yīng)的錯誤圖像,并能打印輸出。
09、機(jī)器視覺的應(yīng)用領(lǐng)域
1.識別
2.標(biāo)準(zhǔn)一維碼、二維碼的解碼
3.光學(xué)字符識別(OCR)和確認(rèn)(OCV)
4.檢測
5.色彩和瑕疵檢測
6.零件或部件的有無檢測
7.目標(biāo)位置和方向檢測和測量
8.尺寸和容量檢測
9.預(yù)設(shè)標(biāo)記的測量,如孔位到孔位的距離
10.機(jī)械手引導(dǎo)
11.輸出空間坐標(biāo)引導(dǎo)機(jī)械手精確定位
10、機(jī)器視覺與計(jì)算機(jī)視覺的區(qū)別?
計(jì)算機(jī)視覺,主要是對質(zhì)的分析,比如分類識別,這是一個杯子那是一條狗。或者做身份確認(rèn),比如人臉識別,車牌識別。或者做行為分析,比如人員入侵,徘徊,遺留物,人群聚集等。
機(jī)器視覺,主要側(cè)重對量的分析,比如通過視覺去測量一個零件的直徑,一般來說,對準(zhǔn)確度要求很高。我記得以前接觸過一個需求: 視覺測量鐵路道岔缺口。哥剛畢業(yè)的時候在鐵路上班,做過控制系統(tǒng),還開過內(nèi)燃機(jī)車,很清楚道岔缺口的重要性,這玩意兒你說要是測不準(zhǔn),呵呵:)
當(dāng)然,也不能完全按質(zhì)或量一刀切,有些計(jì)算機(jī)視覺應(yīng)用也需要分析量,比如商場的人數(shù)統(tǒng)計(jì)。有些機(jī)器視覺也需要分析質(zhì),比如零件自動分揀。但,計(jì)算機(jī)視覺一般來說對量的要求不會很高,商場人數(shù)統(tǒng)計(jì)誤差個百分之幾死不了人的,但機(jī)器視覺真的會,比如那個道岔缺口測量。
編輯:黃飛
-
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1603瀏覽量
60070 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4375瀏覽量
120357 -
工業(yè)相機(jī)
+關(guān)注
關(guān)注
5文章
325瀏覽量
23643
原文標(biāo)題:機(jī)器視覺基礎(chǔ)知識匯總
文章出處:【微信號:機(jī)器視覺沙龍,微信公眾號:機(jī)器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
機(jī)器視覺與計(jì)算機(jī)視覺的關(guān)系簡述
機(jī)器視覺系統(tǒng)應(yīng)用于標(biāo)簽外觀視覺檢查!
服務(wù)機(jī)器人的視覺系統(tǒng)怎么設(shè)計(jì)?
機(jī)器視覺的工作原理及其與計(jì)算機(jī)視覺的區(qū)別
機(jī)器視覺和計(jì)算機(jī)視覺的區(qū)別
什么是機(jī)器視覺?機(jī)器視覺與計(jì)算機(jī)有什么關(guān)系?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論