 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
近年來,隨著以太網技術的進一步發展和完善,特別是通信速率的提高和交互技術的應用,使得以太網技術應用于現場控制領域成為可能,這對工業控制網絡產生了新的影響。從目前的趨勢來看,以太網己經進入了現場控制級,但是已有的現場總線仍將繼續存在,工業以太網只能占領一定的市場。
從現實來看,以太網擴展了現有的系統,但是現場總線不可能完全被工業以太網替代,后者的潛力巨大,其應用領域一定會不斷擴大。所以,將現場總線與以太網結合,從而實現底層生產與上層管理的緊密集成,已經成為一種趨勢。CAN總線作為國際上應用最廣泛的現場總線之一,在我國也得到了很廣泛的應用,該設計以CAN總線作為工業現場總線,實現其與以太網的互聯。
1硬件結構
目前,對于CAN和以太網相連的嵌入式網關設計主要有兩種方法:一種是低檔MCU加接口芯片的設計方法,另一種是高檔MCU加EOS(實時多任務操作系統)再加接口芯片的設計方法。因CAN只采用了ISO/OSI參考模型的一、二層,協議相對簡單,比較適合用于低成本、速率要求不高的離散控制系統。從合理的成本和有效利用處理能力這兩方面考慮,該設計采用低檔MCU加接口芯片的方法,其硬件框圖見圖1.
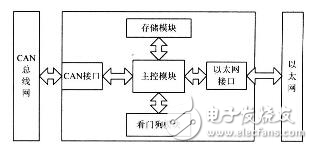
圖1 硬件原理圖
1.1主控芯片及以太網接口模塊
根據要求,該系統選擇了性能價格比較高的Atmel公司生產的AT89C55單片機。它是面向測控對象和嵌入式應用的,所以它的體系結構以及CPU、指令系統、外圍單元電路都是按照這種要求專門設計的。它內部帶高達20 KB的FLASH程序存儲器,AT89C55完全兼容8051指令集,片上FLASH方便了使用者進行在線編程,工作速率最高可達33 MHz,256 B的內部RAM,32個可編程的I/O口,3個16位的定時/計數器,8個中斷源,支持低功耗的空閑工作模式。以太網接口選用的是RTL8019AS芯片,它是由Realtek公司生產的一種高度集成的以太網控制器,能實現以太網媒介訪問層(MAC)和物理層(PHY)的全部功能。RTL8019AS內部有兩個RAM區域:一是16 KB,地址為0x4000~0x7fff,要接收和發送數據包必須通過DMA讀寫RTL8019AS內部的16 KB的RAM,它實際上是雙端口RAM,即有兩條總線與其連接,一條總線用于RTL8019AS讀/寫或寫/讀該RAM,即本地DMA;另一條總線用于單片機讀或寫該RAM,即遠程DMA;二是32個字節,地址為0x0000~0x001F,用于存儲以太網物理地址。主控芯片和以太網接口芯片的硬件接口原理圖見圖2.值得注意的是由于以太網的包最大可以超過1 500個字節,AT89C55的片內RAM只有256個字節,因此無法存儲這么大的包,所以這里擴展了一個32 KB的外部RAM,這樣同時也能提高單片機的數據傳輸速度。
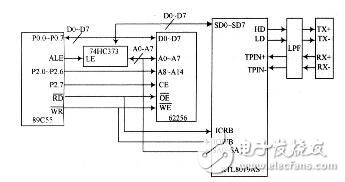
圖2 以太網接口電路原理圖
1.2 CAN接口模塊
組成CAN系統的主要器件是CAN控制器和收發器。該設計中,CAN接口模塊選用SJA1000芯片和PCA82C250芯片。SJA1000是一個獨立的CAN控制器,它是Philips公司另一個CAN控制器PCA82C200的替代產品,且增加了一種新的工作模式(Peli CAN),這種模式支持CAN 2.0B協議。SJA1000主要完成CAN的通信協議,實現報文的裝配和拆分、接收信息的過濾和校驗等。
PCA82C250是CAN控制器與物理總線之間的接口,主要用于增強系統的驅動能力。采用收發器的系統中,節點數至少可以達到110個,同時還具有降低射頻干擾(RFI)和很強的抗電磁干擾(EMI)能力。在處理這部分電路時,有幾個地方要特別注意:
(1)晶振電路的問題。89C55和SJA1000都應該有各自獨立的晶振電路,不能夠用SJA1000的時鐘輸出信號CLKOUT來驅動單片機。
(2)復位引腳的問題。雖然SJA1000的復位是低電平,但不能通過一個非門直接連接單片機的復位引腳。一般對解決復位引腳問題有兩種方式:第一種是使用單片機的I/O引腳控制SJA的復位引腳,其好處是單片機可以完全控制SJA的復位過程;第二種是采用適當的復位芯片,為了降低成本,該設計采取的是第一種方法。
(3)RX1引腳的電位必須維持在約0.5 VCC上,否則將不能形成CAN協議所要求的邏輯電平。
(4)一定要注意電纜的終端阻抗匹配,它直接影響CAN總線是否能正常工作和網絡性能。CAN接口模塊的硬件電路圖見圖3,在PCA82C250的RS腳上接有一個斜率電阻R,可根據總線通信速度適當調整電阻的大小。
從現實來看,以太網擴展了現有的系統,但是現場總線不可能完全被工業以太網替代,后者的潛力巨大,其應用領域一定會不斷擴大。所以,將現場總線與以太網結合,從而實現底層生產與上層管理的緊密集成,已經成為一種趨勢。CAN總線作為國際上應用最廣泛的現場總線之一,在我國也得到了很廣泛的應用,該設計以CAN總線作為工業現場總線,實現其與以太網的互聯。
1硬件結構
目前,對于CAN和以太網相連的嵌入式網關設計主要有兩種方法:一種是低檔MCU加接口芯片的設計方法,另一種是高檔MCU加EOS(實時多任務操作系統)再加接口芯片的設計方法。因CAN只采用了ISO/OSI參考模型的一、二層,協議相對簡單,比較適合用于低成本、速率要求不高的離散控制系統。從合理的成本和有效利用處理能力這兩方面考慮,該設計采用低檔MCU加接口芯片的方法,其硬件框圖見圖1.
圖1 硬件原理圖
1.1主控芯片及以太網接口模塊
根據要求,該系統選擇了性能價格比較高的Atmel公司生產的AT89C55單片機。它是面向測控對象和嵌入式應用的,所以它的體系結構以及CPU、指令系統、外圍單元電路都是按照這種要求專門設計的。它內部帶高達20 KB的FLASH程序存儲器,AT89C55完全兼容8051指令集,片上FLASH方便了使用者進行在線編程,工作速率最高可達33 MHz,256 B的內部RAM,32個可編程的I/O口,3個16位的定時/計數器,8個中斷源,支持低功耗的空閑工作模式。以太網接口選用的是RTL8019AS芯片,它是由Realtek公司生產的一種高度集成的以太網控制器,能實現以太網媒介訪問層(MAC)和物理層(PHY)的全部功能。RTL8019AS內部有兩個RAM區域:一是16 KB,地址為0x4000~0x7fff,要接收和發送數據包必須通過DMA讀寫RTL8019AS內部的16 KB的RAM,它實際上是雙端口RAM,即有兩條總線與其連接,一條總線用于RTL8019AS讀/寫或寫/讀該RAM,即本地DMA;另一條總線用于單片機讀或寫該RAM,即遠程DMA;二是32個字節,地址為0x0000~0x001F,用于存儲以太網物理地址。主控芯片和以太網接口芯片的硬件接口原理圖見圖2.值得注意的是由于以太網的包最大可以超過1 500個字節,AT89C55的片內RAM只有256個字節,因此無法存儲這么大的包,所以這里擴展了一個32 KB的外部RAM,這樣同時也能提高單片機的數據傳輸速度。
圖2 以太網接口電路原理圖
1.2 CAN接口模塊
組成CAN系統的主要器件是CAN控制器和收發器。該設計中,CAN接口模塊選用SJA1000芯片和PCA82C250芯片。SJA1000是一個獨立的CAN控制器,它是Philips公司另一個CAN控制器PCA82C200的替代產品,且增加了一種新的工作模式(Peli CAN),這種模式支持CAN 2.0B協議。SJA1000主要完成CAN的通信協議,實現報文的裝配和拆分、接收信息的過濾和校驗等。
PCA82C250是CAN控制器與物理總線之間的接口,主要用于增強系統的驅動能力。采用收發器的系統中,節點數至少可以達到110個,同時還具有降低射頻干擾(RFI)和很強的抗電磁干擾(EMI)能力。在處理這部分電路時,有幾個地方要特別注意:
(1)晶振電路的問題。89C55和SJA1000都應該有各自獨立的晶振電路,不能夠用SJA1000的時鐘輸出信號CLKOUT來驅動單片機。
(2)復位引腳的問題。雖然SJA1000的復位是低電平,但不能通過一個非門直接連接單片機的復位引腳。一般對解決復位引腳問題有兩種方式:第一種是使用單片機的I/O引腳控制SJA的復位引腳,其好處是單片機可以完全控制SJA的復位過程;第二種是采用適當的復位芯片,為了降低成本,該設計采取的是第一種方法。
(3)RX1引腳的電位必須維持在約0.5 VCC上,否則將不能形成CAN協議所要求的邏輯電平。
(4)一定要注意電纜的終端阻抗匹配,它直接影響CAN總線是否能正常工作和網絡性能。CAN接口模塊的硬件電路圖見圖3,在PCA82C250的RS腳上接有一個斜率電阻R,可根據總線通信速度適當調整電阻的大小。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于ST的現場總線/實時工業以太網開發方案
- 基于嵌入式Linux的以太網與CAN和MBUS兩種現場總線的通信網關設計
- 基于以太網與CAN現場總線的嵌入式網關設計 16次下載
- 低成本CAN與以太網互連的方案 12次下載
- EtherCAT_以太網現場總線 52次下載
- Profibus總線與以太網之間的冗余通信 38次下載
- 基于VME總線的以太網接口設備
- 工業以太網和CAN-bus在隧道照明控制網絡中的應用
- 基于ARM 技術的CAN總線和以太網間的互聯設計
- 基于工業以太網的總線綜合管理系統研制
- 工業以太網和CAN-bus在隧道照明控制網絡中的應用
- 以太網和現場總線的互連
- CAN 與以太網數據交換的研究與分析
- 工業以太網現場總線發展的未來趨勢
- CAN 與以太網數據交換的研究與分析
- 現場總線和工業以太網有什么區別 1247次閱讀
- 工業以太網與工業現場總線的區別 1351次閱讀
- CAN轉以太網模塊的應用場景 441次閱讀
- EtherCAT和西門子公司的Profinet兩種實時以太網總線的對比 3232次閱讀
- 車載以太網挑戰CAN總線 3379次閱讀
- 工業以太網能否代替現場總線 1014次閱讀
- 工業以太網與傳統以太網絡的比較 4249次閱讀
- 現場總線技術有什么優點 5727次閱讀
- 一文詳解什么是實時以太網 1.3w次閱讀
- 以太網的CAN總線系統設計 1449次閱讀
- 自動化控制系統中現場總線與以太網的互連 3860次閱讀
- 以太網無法取代CAN的原因是什么? 2754次閱讀
- 宜科:工業以太網現場總線互連解決方案 1129次閱讀
- 基于PIC32的以太網與CAN總線的網橋設計 1030次閱讀
- 一種CAN總線與以太網互連系統的設計方案 4219次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1497次下載 | 免費
- 2TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 3單片機典型實例介紹
- 18.19 MB | 99次下載 | 1 積分
- 4S7-200PLC編程實例詳細資料
- 1.17 MB | 28次下載 | 1 積分
- 5筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 6開關電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費
- 79天練會電子電路識圖
- 5.91 MB | 6次下載 | 免費
- 8100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537794次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論