 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
汽車信息化、智能化是當今汽車研究的重點,已經成為衡量各國汽車工業發展水平的重要標志[1],智能汽車作為一種全新的汽車概念和汽車產品,將成為汽車生產和汽車市場的主流產品[2]。而“飛思卡爾”杯全國大學生智能車競賽由高等學校自動化專業教學指導分委員會主辦,飛思卡爾半導體公司協辦,并由各個分賽區的承辦大學組織。比賽以迅猛發展的汽車電子為背景,涵蓋了控制、模式識別、傳感技術、電子、電氣、計算機、機械等多個學科交叉的科技創意性,旨在培養大學生對知識的把握和創新能力,以及從事科學研究的能力[3]。
根據“飛思卡爾”智能車大賽規則要求:使用統一車模,核心控制單元采用飛思卡爾MC9S12DG128CPU。在此基礎上,自主構思控制方案及系統控制電路的設計。系統控制電路設計包括:傳感器信號的采集、處理電路設計、驅動電機及轉向舵機控制電路設計以及各類接口電路設計。控制方案設計包括:控制系統的組成設計、各類算法的設計及優化等內容。系統設計、調試完成后,在規定的、標有引導線的賽道上完成自尋跡行走,其賽道是在白色底板上鋪設黑色引導線,以完成時間最短者為優勝。比賽分為光電組和攝像頭組。筆者為攝像頭組,采用的是攝像頭尋跡方式。
智能小車(以下簡稱小車)的控制系統主要由三大部分組成:傳感器信號采集及處理、車速控制和轉向控制。由攝像頭采集道路信息,經處理分析后識別路徑,根據不同的路徑決策出不同的速度和轉向角度[4-5]。在保證安全的基礎上,一方面需要考慮如何提高極限速度,另一方面需要考慮如何提高平均速度,其平均速度的大小最終將決定比賽成績。分析歷屆比賽可以發現,整個賽道中60%~70%的長度為彎道,因此,小車彎道行駛速度很大程度上決定了小車在整個賽道上平均速度的大小。本文將針對小車在行走過程中,就如何利用圖像數據,給出合理的轉向策略進行深入探討。
就普通駕駛員而言,駕駛車輛行駛在公路上,直道時保持高速運行狀態,而彎道時會根據不同的彎道做出合理的決策。一般為先減速,然后在一個比較低的速度下通過彎道,過彎后加速,最終回到直道速度。而在賽車場上的情景則不同,賽車選手輕易不會選擇普通駕駛員的轉彎策略,而是利用前輪轉向帶來的向心力并結合賽車入彎前的固有慣性達到快速轉彎的目的。對于一輛有視覺的智能小車是否也可以模擬這種高速運動過程,從而贏得比賽?筆者在綜合分析視覺圖像的特點、舵機模型以及圓周運動的特點后提出了一種可以高速入彎而不必減速或輕微減速、同時又能保證小車不會沖出賽道的安全過彎策略。
1 道路信息提取
要實現一個完整的基于視覺尋跡的智能小車,首先需利用攝像頭獲取道路信息,然后對采集到的原始圖像進行數據處理,以獲取賽道中引導線在圖像坐標系中的位置[6-8]。
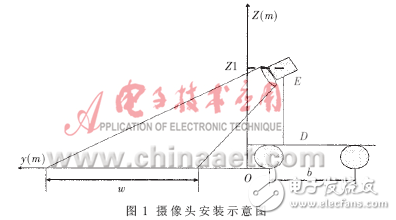
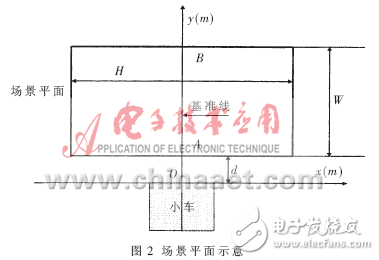
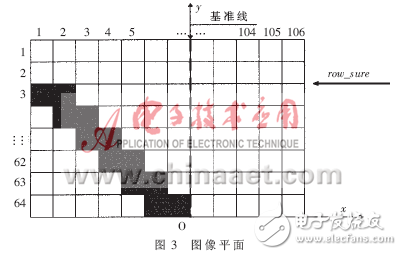
圖1為攝像頭安裝示意圖。其中,Z1為攝像頭距地面的高度;w為視野場景的寬度,其大小與攝像機安裝的俯角和高度都有關系;b為輪間距。對場景中的特征點,只要知道其在場景中的位置,即可計算出該點與小車的相對位置。由上往下延Z軸反方向看,可得到場景平面,如圖2所示。其中,場景平面離小車的距離為d,這段距離為盲區,場景平面寬為W,長為H。定義小車的中線為基準線,由攝像頭獲得的圖像即是場景平面。受MC9S12DG128CPU單片機處理能力的限制,選用356×292 CMOS黑白攝像頭,將其設置為逐行掃描模式。單行采樣106點。根據實驗結果,綜合考慮各種因素,選取其中64行信息形成一幅64×106的圖像平面,用來判斷彎道、直道以及彎道位置,從而達到減小計算量的目的。圖像如圖3所示。
根據“飛思卡爾”智能車大賽規則要求:使用統一車模,核心控制單元采用飛思卡爾MC9S12DG128CPU。在此基礎上,自主構思控制方案及系統控制電路的設計。系統控制電路設計包括:傳感器信號的采集、處理電路設計、驅動電機及轉向舵機控制電路設計以及各類接口電路設計。控制方案設計包括:控制系統的組成設計、各類算法的設計及優化等內容。系統設計、調試完成后,在規定的、標有引導線的賽道上完成自尋跡行走,其賽道是在白色底板上鋪設黑色引導線,以完成時間最短者為優勝。比賽分為光電組和攝像頭組。筆者為攝像頭組,采用的是攝像頭尋跡方式。
智能小車(以下簡稱小車)的控制系統主要由三大部分組成:傳感器信號采集及處理、車速控制和轉向控制。由攝像頭采集道路信息,經處理分析后識別路徑,根據不同的路徑決策出不同的速度和轉向角度[4-5]。在保證安全的基礎上,一方面需要考慮如何提高極限速度,另一方面需要考慮如何提高平均速度,其平均速度的大小最終將決定比賽成績。分析歷屆比賽可以發現,整個賽道中60%~70%的長度為彎道,因此,小車彎道行駛速度很大程度上決定了小車在整個賽道上平均速度的大小。本文將針對小車在行走過程中,就如何利用圖像數據,給出合理的轉向策略進行深入探討。
就普通駕駛員而言,駕駛車輛行駛在公路上,直道時保持高速運行狀態,而彎道時會根據不同的彎道做出合理的決策。一般為先減速,然后在一個比較低的速度下通過彎道,過彎后加速,最終回到直道速度。而在賽車場上的情景則不同,賽車選手輕易不會選擇普通駕駛員的轉彎策略,而是利用前輪轉向帶來的向心力并結合賽車入彎前的固有慣性達到快速轉彎的目的。對于一輛有視覺的智能小車是否也可以模擬這種高速運動過程,從而贏得比賽?筆者在綜合分析視覺圖像的特點、舵機模型以及圓周運動的特點后提出了一種可以高速入彎而不必減速或輕微減速、同時又能保證小車不會沖出賽道的安全過彎策略。
1 道路信息提取
要實現一個完整的基于視覺尋跡的智能小車,首先需利用攝像頭獲取道路信息,然后對采集到的原始圖像進行數據處理,以獲取賽道中引導線在圖像坐標系中的位置[6-8]。
圖1為攝像頭安裝示意圖。其中,Z1為攝像頭距地面的高度;w為視野場景的寬度,其大小與攝像機安裝的俯角和高度都有關系;b為輪間距。對場景中的特征點,只要知道其在場景中的位置,即可計算出該點與小車的相對位置。由上往下延Z軸反方向看,可得到場景平面,如圖2所示。其中,場景平面離小車的距離為d,這段距離為盲區,場景平面寬為W,長為H。定義小車的中線為基準線,由攝像頭獲得的圖像即是場景平面。受MC9S12DG128CPU單片機處理能力的限制,選用356×292 CMOS黑白攝像頭,將其設置為逐行掃描模式。單行采樣106點。根據實驗結果,綜合考慮各種因素,選取其中64行信息形成一幅64×106的圖像平面,用來判斷彎道、直道以及彎道位置,從而達到減小計算量的目的。圖像如圖3所示。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 后輪雙電機差速與前輪轉向協調控制在智能車模上的應用 24次下載
- 基于DDPG算法的智能車匯流模型 7次下載
- 如何使用模糊控制進行智能車調速系統的設計 4次下載
- 如何設計一個具有路徑記憶功能的智能車控制系統的資料概述 16次下載
- 基于FPGA_DSP的智能車全景視覺系統 7次下載
- 機器視覺智能車虛擬環境的搭建_鄒斌 1次下載
- 基于模糊控制的智能車調速系統的設計 2次下載
- 基于視覺的智能車模糊PID控制算法 3次下載
- 改進PID算法在智能車控制上的應用 1次下載
- 電磁導航式智能車的設計與實現 3次下載
- 飛思卡爾智能車控制系統設計 164次下載
- 智能車電磁檢測控制技術研究 97次下載
- 基于單目視覺的智能車速度模糊控制系統
- 基于路徑識別的智能車系統設計
- 基于單目視覺的智能車速度模糊控制系統
- 基于機器視覺的智能車系統 1633次閱讀
- 圖像分類法實現智能車找路功能 1604次閱讀
- 基于MC68S912DP256芯片實現智能車導航系統的設計 2189次閱讀
- 微雪電子智能車Arduino AlphaBot2簡介 2085次閱讀
- 微雪電子智能車學習板藍牙Arduino開發板介紹 1695次閱讀
- 微雪電子智能車學習板配件包Arduino開發板簡介 1392次閱讀
- 微雪電子 Raspberry Pi Zero WH智能車介紹 1790次閱讀
- 微雪電子樹莓派 Arduino 智能車擴展套件介紹 2218次閱讀
- 智能車中雙排傳感器的優勢及特點介紹 727次閱讀
- 光電傳感器對智能車的控制設計 1804次閱讀
- 創建智能車機器人smartcar的步驟教程詳解 4341次閱讀
- 基于模糊控制算法的智能車轉向舵機控制 1.1w次閱讀
- 智能車舵機控制算法詳解 2.9w次閱讀
- 智能車速度控制pid(電機閉環控制算法) 5.2w次閱讀
- 三軸加速度傳感器在智能車控制與道路識別中的應用 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1491次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機和 SG3525的程控開關電源設計
- 0.23 MB | 4次下載 | 免費
- 8基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論