 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
外骨骼機(jī)器人的研究可以追溯到 20 世紀(jì) 60 年代,最初的研究目的主要是用于提高士兵的背負(fù)承載能力,隨著機(jī)器人技術(shù)和生物檢測技術(shù)的不斷發(fā)展,外骨骼機(jī)器人的研究取得了飛躍性突破。基于不同作用對象,大致可以將其分為三類:增強(qiáng)健康人群自身機(jī)能的人類增強(qiáng)型外骨骼,如BLEEX(Berkeley lower extremity exoskeleton);下肢運(yùn)動能力受損患者康復(fù)治療的步態(tài)康復(fù)型外骨骼,如 ReWalk;輔助殘疾人或老年人站立或行走的輔助型外骨骼,如 HAL(hybrid assistive leg)。
基于不同目的和作用對象,外骨骼機(jī)器人通過采用不同控制策略,并利用信息采集模塊實時監(jiān)測穿戴者運(yùn)動信息及人機(jī)交互信息,以保證運(yùn)動的正確性和穿戴者的適宜性。同時,通過對外骨骼進(jìn)行精確控制可以有效避免對患者造成二次傷害,因此開展外骨骼機(jī)器人控制策略的研究具有重要的實際應(yīng)用價值。
1 下肢外骨骼機(jī)器人控制策略
根據(jù)控制參數(shù)的不同,外骨骼控制類型可分為基于位置的控制、基于力信息的人機(jī)交互控制、基于生物電信號的人機(jī)交互控制和智能控制。其中,基于位置的控制策略可分為軌跡跟蹤控制、骨盆控制;基于力信息的人機(jī)交互控制策略可分為阻抗控制、力/ 位混合控制、靈敏度放大控制、零力矩點(diǎn)控制、地面反作用力控制 ;基于生物電信號的人機(jī)交互控制策略可分為肌電控制、腦電控制;智能控制策略分為模糊控制、神經(jīng)網(wǎng)絡(luò)控制。其特點(diǎn)和應(yīng)用如表1所示。
1.1 基于位置的控制
基于位置的控制類型根據(jù)正常人體關(guān)節(jié)位移軌跡,規(guī)劃外骨骼運(yùn)動軌跡,其控制策略又可分為軌跡跟蹤控制和骨盆控制。
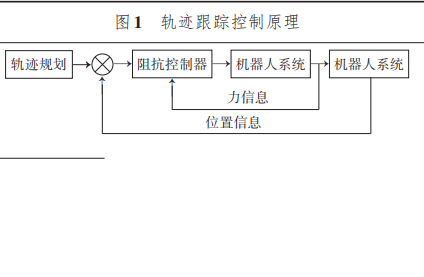
1.1.1 軌跡跟蹤控制策略是指外骨骼帶動患肢沿預(yù)先規(guī)劃的軌跡進(jìn)行步態(tài)訓(xùn)練,其原理如圖1所示。瑞士Lokomat 康復(fù)機(jī)器人采用軌跡跟蹤控制,預(yù)先設(shè)定期望運(yùn)動軌跡,通過控制機(jī)器人的關(guān)節(jié)角度和角速度,實現(xiàn)患者的康復(fù)訓(xùn)練。意大利的臥式步態(tài)康復(fù)機(jī)器人[7] 通過規(guī)劃特定軌跡的腿部運(yùn)動,帶動患者患肢在矢狀面沿期望軌跡運(yùn)動,以模擬人體步態(tài)運(yùn)動。韓國慶熙大學(xué)研制的步態(tài)康復(fù)訓(xùn)練機(jī)在采用軌跡跟蹤控制的基礎(chǔ)上,在腳踏板上安裝壓力傳感器實時監(jiān)測患者在訓(xùn)練時的足底壓力,評定康復(fù)效果 。日本筑波大學(xué)研制的步態(tài)康復(fù)機(jī)器人根據(jù)預(yù)先制定好的步態(tài)軌跡,帶動患者患肢做上樓梯運(yùn)動。哈爾濱工程大學(xué)研制的減重式步態(tài)訓(xùn)練機(jī)器人和站立式下肢康復(fù)訓(xùn)練機(jī)也是采用軌跡跟蹤控制幫助患者模擬正常人行走訓(xùn)練。太原理工大學(xué)張政等 結(jié)合傳統(tǒng) PID 控制算法,設(shè)計了 bangbang-PD 軌跡跟蹤控制算法。
- 基于TI處理器的外骨骼輔助康復(fù)機(jī)器人 15次下載
- 上肢康復(fù)機(jī)器人現(xiàn)狀及研究分析 7次下載
- 空地機(jī)器人協(xié)同導(dǎo)航方法與實驗研究詳細(xì)說明 3次下載
- 時序分析的優(yōu)化策略詳細(xì)說明 17次下載
- 時序分析的優(yōu)化策略詳細(xì)說明 19次下載
- 發(fā)那科機(jī)器人示教手冊DeviceNet配置流程詳細(xì)說明 18次下載
- 機(jī)器人單片機(jī)控制三大模塊的方法的詳細(xì)說明 1次下載
- 設(shè)計機(jī)器人所需要的參數(shù)詳細(xì)說明 1次下載
- 六自由度雙足機(jī)器人應(yīng)該如何裝配說明書詳細(xì)說明 12次下載
- 機(jī)器人的簡介和構(gòu)造詳細(xì)說明 12次下載
- 下肢外骨骼負(fù)載攜行控制方法研究 1次下載
- 骨骼液壓動力單元研究 1次下載
- 氣動外骨骼助力機(jī)器人嵌入式控制系統(tǒng)研究 4次下載
- 機(jī)器人運(yùn)動自適應(yīng)智能外骨骼系統(tǒng)的研發(fā) 15次下載
- 欠驅(qū)動機(jī)器人可控性綜述 17次下載
- 如何使用PLC控制機(jī)器人 795次閱讀
- 先進(jìn)封裝中硅通孔(TSV)銅互連電鍍研究進(jìn)展 820次閱讀
- 基于仿人機(jī)器人的多功能通用型控制系統(tǒng)的設(shè)計 2044次閱讀
- FPGA的入門基礎(chǔ)知識詳細(xì)說明 9217次閱讀
- 機(jī)器人控制系統(tǒng)分類_機(jī)器人控制系統(tǒng)有哪些 2.6w次閱讀
- 服務(wù)機(jī)器人功能有哪些 6106次閱讀
- 機(jī)器人控制器有哪些類型_機(jī)器人控制器發(fā)展 1.1w次閱讀
- 機(jī)器人視覺伺服系統(tǒng)技術(shù)的介紹及發(fā)展歷程的詳細(xì)資料說明 3700次閱讀
- 電科大機(jī)器人研究中心研發(fā)出第四代外骨骼機(jī)器人 4951次閱讀
- 機(jī)器人的運(yùn)動控制的介紹和如何將機(jī)器人的運(yùn)動控制分成4種任務(wù) 1w次閱讀
- 基于PLC的機(jī)器人伺服運(yùn)動控制系統(tǒng)設(shè)計詳解 1.5w次閱讀
- RFID導(dǎo)購機(jī)器人導(dǎo)航與控制系統(tǒng)的設(shè)計方案研究詳細(xì)教程 1209次閱讀
- 詳細(xì)解析工業(yè)機(jī)器人控制系統(tǒng) 3.5w次閱讀
- 工業(yè)機(jī)器人虛擬樣機(jī)系統(tǒng)的研究 1385次閱讀
- 基于運(yùn)動學(xué)原理的可穿戴下肢助力機(jī)器人 1.1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1497次下載 | 免費(fèi)
- 2單片機(jī)典型實例介紹
- 18.19 MB | 98次下載 | 1 積分
- 3S7-200PLC編程實例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍(lán)牙設(shè)備在嵌入式領(lǐng)域的廣泛應(yīng)用
- 0.63 MB | 3次下載 | 免費(fèi)
- 8基于單片機(jī)的紅外風(fēng)扇遙控
- 0.23 MB | 3次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33564次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21540次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183278次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論