
產品詳情
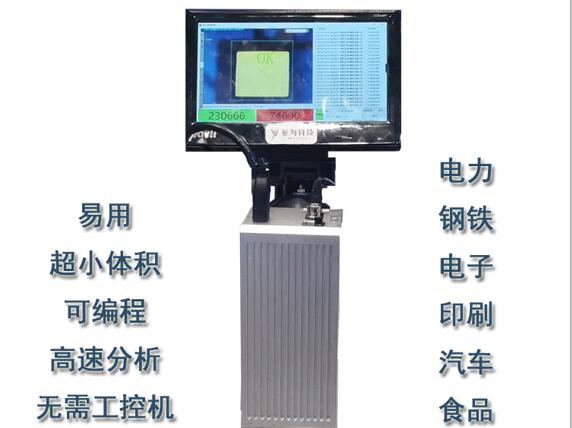
一、系統簡介
1、本平臺可適應國內外絕大部分的相機。
2、具備測距、動作顯示、旋轉、描邊、放大、FFT分析、顏色識別、顏色增強、幾何匹配、字符識別、二維碼識別、條形碼識別、數據采集、輸出控制等功能。
1、LabVIEW及組件安裝
2、在運行前先選擇相機
3、運行左上角向右的箭頭
4、根據提示檢查硬件
5、按下Ctrl+E可以查看后臺程序,修改后臺參數
6、制作exe文件,見“LabVIEW如何制作EXE和SETUP文件”
1、本程序僅供參考,非經亞為授權,不得用于商業用途
2、亞為不對用戶修改過的程序負責
3、程序更新,恕不另行通知
4、必須整個壓縮包解壓縮運行,否則dll文件無法調用
5、軟件如有bug,歡迎批評指正
系統功能 | 描述 | 難度級別 | ||
視覺 基礎 | 1. | 圖像采集 | 圖像采集、圖片打開、圖片存儲、錄像 | 初級 |
2. | 顏色處理 | 顏色替換與過濾,將過濾點的位置填充目標顏色 | 初級 | |
3. | 局部放大 | 在實時圖像中選取要放大的區域,可得到放大后圖像 | 初級 | |
4. | 圖像裁剪 | 十種ROI將圖像按照規定大小裁剪 | 初級 | |
5. | 圖像FFT | 得到FFT變換圖 | 初級 | |
6. | 圖片增強 | 得到增強后的圖像(白的更白,黑的更黑) | 中級 | |
7. | 角度調整 | 對實時采集到的圖像進行旋轉、鏡像處理 | 中級 | |
8. | 圖片標注 | 在指定坐標位置標注指定文本 | 中級 | |
9. | 圖像直方圖 | 得到R、G、B三色的直方圖 | 中級 | |
10. | 輪廓描邊 | 得到實時采集圖像的邊界掃描圖,用于測量輪廓與劃痕 | 高級* | |
11. | 圖像觸發采集 | 通過外觸發,高精度定位目標采集區域 | 定制級 | |
12. | 3D相機使用 | 3D相機編程,三維掃描,測距 | 定制級 | |
13. | 線陣相機使用 | 線陣相機數據獲取與處理 | 定制級 | |
14. | Halcon交互 | 與Halcon函數庫交互編程,實現高效計算 | 定制級 | |
15. | Matlab交互 | 與Matlab函數庫交互編程,實現高效計算 | 定制級 | |
目標 測試 | 16. | 圖片對比 | 得到兩張圖片的色差圖 | 初級 |
17. | 測距與尺寸 | 目標邊緣距離檢測,像素轉換成長度、角度 | 初級 | |
18. | 顏色識別 | 識別目標區域顏色,可事先學習顏色,亮度測量 | 中級 | |
19. | 條形碼識別 | 識別條形碼為字符 | 中級 | |
20. | 模式匹配 | 對非規則目標,事先學習模板,高速定位類似對象 | 高級* | |
21. | 邊緣跟蹤 | 選取要跟蹤的區域,可得到邊緣跟蹤的結果圖像 | 高級* | |
22. | 目標計數 | 根據設定范圍及形態查找目標并計數 | 高級* | |
23. | 目標跟蹤 | 學習目標特征,對動態目標跟蹤 | 高級* | |
24. | 二維碼識別 | 識別二維碼為字符 | 高級* | |
25. | OCR字符識別 | 學習字體庫,在實時圖像上選取區域,識別字符 | 高級* | |
26. | 3D立體測量 | 三維測量目標輪廓及深度 | 定制級 | |
檢測與控制 | 27. | 相機控制 | 對相機的參數和圖片的大小進行設置 | 中級 |
28. | 通信控制 | USB(默認)、串口、網口、HID的8IO卡通信,鍵盤控制 | 高級* | |
29. | 編程擴展 | 邏輯運算、變量賦值、延時、交互 | 定制級 | |
30. | 應用拓展 | 效率統計、表格或數據庫記錄 | 定制級 | |
31. | 機器人互動 | 與機器人手臂互動 | 定制級 | |
32. | 視覺人工智能 | 視覺人臉識別、體態識別、虹膜識別,加密控制 | 定制級 | |
備注:EVPS2.0基礎版(初中級)、EVPS3.0高級版(初中高級),不開放定制版 | ||||




 工商網監
工商網監