完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 分類器
分類是數據挖掘的一種非常重要的方法。分類的概念是在已有數據的基礎上學會一個分類函數或構造出一個分類模型(即我們通常所說的分類器(Classifier))。該函數或模型能夠把數據庫中的數據紀錄映射到給定類別中的某一個,從而可以應用于數據預測。
文章:152個 瀏覽:13406次 帖子:6個

一對其余其實更加好理解,每次將一個類別作為正類,其余類別作為負類。此時共有(N個分類器)。在測試的時候若僅有一個分類器預測為正類,則對應的類別標記為最終...

深度學習的效果在某種意義上是靠大量數據喂出來的,小目標檢測的性能同樣也可以通過增加訓練集中小目標樣本的種類和數量來提升。

視覺定位應用主要是找到物體的位置,那么怎么找?在這里一個重要的步驟就是標定,標定是把相機的像素坐標系轉換為機械上的物理坐標系,使得圖像中的識別的像素值轉...

本文還引入了多視角一致性優化模塊,以提高學習到的射線-表面距離場在不同視角下的一致性。通過在多個數據集上的實驗證明,RayDF方法在三維形狀重建的準確性...

算法是數據科學的生命線。 抽樣是數據科學中的一個重要課題,但我們實際上并沒有討論得足夠多。 有時,一個好的抽樣策略會大大推進項目的進展。錯誤的抽樣策略可...

相似結構一直是SLAM和SfM中很難處理卻又不得不處理的問題,如果機器人遇到了非常相似但實際不同的結構,很容易因為匹配數量足夠多而引發假陽性回環和重建失...
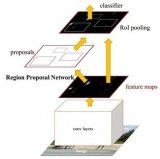
提到RPN網絡,就不能不說anchors。所謂anchors,實際上就是一組由rpn/generate_anchors.py生成的矩形。直接運行作者de...
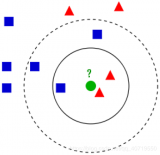
舉例說明: 如果K=3,綠色圓點的最近的3個鄰居是2個紅色小三角形和1個藍色小正方形,少數從屬于多數,基于統計的方法,判定綠色的這個待分類點屬于紅色的三...

OpenOOD v1.5:更全面、更精確的分布外檢測代碼庫及測試平臺
對于訓練好的圖像分類器,能讓其可靠地在開放世界中工作的一個關鍵能力便是檢測未知的、分布外的(out-of-distribution, OOD)樣本。例如...

鋰電企業的競爭早已不僅是規模和數量的較量,更是關于技術、品質和戰略眼光的角逐,而其中,數字化和智能化技術能力將起到關鍵性的支撐作用。
由于準確率低,OpenAI關閉了一個本應區分人類寫作和人工智能的工具。OpenAI表示,它決定在7月20日結束其人工智能分類器。該公司表示:“我們正在努...
GMMSeg:生成式語義分割新范式!可同時處理閉集和開集識別
實驗結果表明,GMMSeg 在多種分割網絡架構 (segmentation architecture) 及骨干網絡 (backbone network)...
OpenVINO模型優化實測:PC/NB當AI辨識引擎沒問題!
這次我們將會自制一個CNN分類器,并透過OpenVINO的模型轉換程序轉換成IR模型,并進行模型效能與正確率分析。依據Intel官方網站的說明,Open...
立體雙目能完美解決問題,缺點是其標定太麻煩,傳感器的尺寸一致性要求很高。還有就是立體匹配算法難度不低,最好使用FPGA,AI加速器完全無用,GPU的話消...
雖然人們可能期望更強的close set分類器過度擬合到train set出現的類別,因此在OSR中表現較差。其實最簡單的方法也非常直觀,就是‘maxi...
模型在Close set和在Open set的表現是否存在一定的相關性呢
開集識別:指對一個在訓練集上訓練好的模型,當利用一個測試集(該測試集的中包含訓練集中沒有的類別)進行測試時,如果輸入已知類別數據,輸出具體的類別,如果輸...
OpenCV預訓練SVM行人HOG特征分類器實現多尺度行人檢測
HOG(Histogram of Oriented Gradient)特征在對象檢測與模式匹配中是一種常見的特征提取算法,是基于本地像素塊進行特征直方圖...
高光譜圖像的分類面臨著維數問題、非線性結構問題等諸多挑戰,面對這些挑戰,我們有什么辦法去解決嗎?今天,小編給大家整理了以下幾個方法: 特征挖掘技術:能在...
高光譜圖像可用于分類的特征比較多,既包括直接光譜向量,還可以計算光譜洗手指數,導數光譜,紋理特征,形狀特征等派生特征。那么想對高光譜圖像進行分類會面臨什...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題 教程专题
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1