完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 時序

這里所說的時序其實就是指時序圖,又名序列圖、循序圖、順序圖,是一種UML交互圖。它通過描述對象之間發送消息的時間順序顯示多個對象之間的動態協作。
這里所說的時序其實就是指時序圖(Sequence Diagram),又名序列圖、循序圖、順序圖,是一種UML交互圖。它通過描述對象之間發送消息的時間順序顯示多個對象之間的動態協作。它可以表示用例的行為順序,當執行一個用例行為時,其中的每條消息對應一個類操作或狀態機中引起轉換的觸發事件。組成元素
時序圖中包括如下元素:角色,對象,生命線,控制焦點和消息。1、角色(Actor)系統角色,可以是人或者其他系統,子系統。2、對象(Object)對象代表時序圖中的對象在交互中所扮演的角色,位于時序圖頂部和對象代表類角色。對象一般包含以下三種命名方式:第一種方式包含對象名和類名。第二種方式只顯示類名不顯示對象名,即為一個匿名對象。第三種方式只顯示對象名不顯示類名。3、生命線(Lifeline)生命線代表時序圖中的對象在一段時期內的存在。時序圖中每個對象和底部中心都有一條垂直的虛線,這就是對象的生命線,對象間 的消息存在于兩條虛線間。4、控制焦點(Activation)控制焦點代表時序圖中的對象執行一項操作的時期,在時序圖中每條生命線上的窄的矩形代表活動期。它可以被理解成C語言語義中一對花括號“{}”中的內容。5、消息(Message)消息是定義交互和協作中交換信息的類,用于對實體間的通信內容建模,信息用于在實體間傳遞信息。允許實體請求其他的服務,類角色通過發送和接受信息進行通信。
這里所說的時序其實就是指時序圖(Sequence Diagram),又名序列圖、循序圖、順序圖,是一種UML交互圖。它通過描述對象之間發送消息的時間順序顯示多個對象之間的動態協作。它可以表示用例的行為順序,當執行一個用例行為時,其中的每條消息對應一個類操作或狀態機中引起轉換的觸發事件。組成元素
時序圖中包括如下元素:角色,對象,生命線,控制焦點和消息。1、角色(Actor)系統角色,可以是人或者其他系統,子系統。2、對象(Object)對象代表時序圖中的對象在交互中所扮演的角色,位于時序圖頂部和對象代表類角色。對象一般包含以下三種命名方式:第一種方式包含對象名和類名。第二種方式只顯示類名不顯示對象名,即為一個匿名對象。第三種方式只顯示對象名不顯示類名。3、生命線(Lifeline)生命線代表時序圖中的對象在一段時期內的存在。時序圖中每個對象和底部中心都有一條垂直的虛線,這就是對象的生命線,對象間 的消息存在于兩條虛線間。4、控制焦點(Activation)控制焦點代表時序圖中的對象執行一項操作的時期,在時序圖中每條生命線上的窄的矩形代表活動期。它可以被理解成C語言語義中一對花括號“{}”中的內容。5、消息(Message)消息是定義交互和協作中交換信息的類,用于對實體間的通信內容建模,信息用于在實體間傳遞信息。允許實體請求其他的服務,類角色通過發送和接受信息進行通信。
結構
時序圖描述對象是如何交互的,并且將重點放在消息序列上。也就是說,描述消息是如何在對象間發送和接收的。時序圖有兩個坐標軸:縱坐標軸顯示時間,橫坐標軸顯示對象。每一個對象的表示方法是:矩形框中寫有對象和 / 或類名,且名字下面有下劃線;同時有一條縱向的虛線表示對象在序列中的執行情況 ( 即發送和接收的消息對象的活動 ) , 這條虛線稱為對象的生命線。對象間的通信用對象的生命線之間的水平的消息線來表示,消息線的箭頭說明消息的類型,如同步,異步或簡單 。 瀏覽時序圖的方法是,從上到下查看對象間交換的消息,分析那些隨著時間的流逝而發生的消息交換。時序圖中的消息可以是信號、操作調用或類似于 C++ 中的 RPC ( Remote Procedure Call,遠程過程調用)或 Java 中的 RMI ( Remote Method Invocation , 遠程方法調用)。當對象接收到一個消息時,該對象中的一項活動就會啟動,我們把這一過程稱做激活 ( Activation )。 激活會顯示控制焦點,表明對象在某一個時間點開始執行。一個被激活的對象或者是執行它自身的代碼,或者是等待另一個對象的返回(該被激活的對象已經向另一個對象發送了消息)。在圖形上,激活被繪制為對象生命線上的一個瘦高矩形。消息可以用消息名及參數來標識。消息還可帶有條件表達式,表示分支或決定是否發送消息。如果用于表示分支,則每個分支是相互排斥的,即在某一時刻僅可發送分支中的一個消息。消息也可以有順序號,但是在時序圖中,消息的順序號很少使用,因為時序圖已經將消息的順序顯式地表示出來了。一個對象可以通過發送消息來創建另一個對象,當一個對象被刪除或自我刪除時,該對象用 “X”標識。
創建步驟
1、確定交互過程的上下文;2、識別參與過程的交互對象;3、為每個對象設置生命線;4、從初始消息開始,依次畫出隨后消息;5、考慮消息的嵌套,標示消息發生時的時間點,則采用FOC(focus of control);6、說明時間約束的地點。
如何看懂時序圖?
操作時序永遠使用是任何一片IC芯片的最主要的內容。一個芯片的所有使用細節都會在它的官方器件手冊上包含。所以使用一個器件事情,要充分做好的第一件事就是要把它的器件手冊上有用的內容提取,掌握。介于中國目前的芯片設計能力有限,所以大部分的器件都是外國幾個IC巨頭比如TI、AT、MAXIM這些公司生產的,器件資料自然也是英文的多,所以,英文的基礎要在閱讀這些數據手冊時得到提高哦。即便有中文翻譯版本,還是建議看英文原版,看不懂時不妨再參考中文版,這樣比較利于提高。
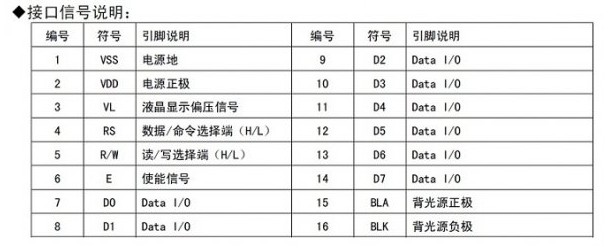
我們首先來看1602的引腳定義,1602的引腳是很整齊的SIP單列直插封裝,所以器件手冊只給出了引腳的功能數據表:
我們只需要關注以下幾個管腳:
3腳:VL,液晶顯示偏壓信號,用于調整LCD1602的顯示對比度,一般會外接電位器用以調整偏壓信號,注意此腳電壓為0時可以得到最強的對比度。
4腳:RS,數據/命令選擇端,當此腳為高電平時,可以對1602進行數據字節的傳輸操作,而此腳為低電平時,則是進行命令字節的傳輸操作。命令字節,即是用來對LCD1602的一些工作方式作設置的字節;數據字節,即使用以在1602上顯示的字節。值得一提的是,LCD1602的數據是8位的。
5腳:R/W,讀寫選擇端。當此腳為高電平可對LCD1602進行讀數據操作,反之進行寫數據操作。筆者認為,此腳其實用處不大,直接接地永久置為低電平也不會影響其正常工作。但是尚未經過復雜系統驗證,保留此意見。
6腳:E,使能信號,其實是LCD1602的數據控制時鐘信號,利用該信號的上升沿實現對LCD1602的數據傳輸。
7~14腳:8位并行數據口,使得對LCD1602的數據讀寫大為方便。
現在來看LCD1602的操作時序:
![]()
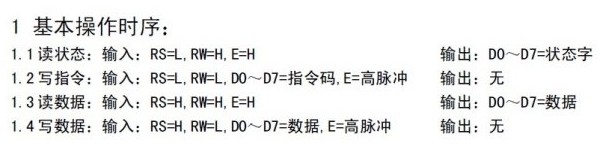
在此,我們可以先不讀出它的數據的狀態或者數據本身。所以只需要看兩個寫時序:
① 當我們要寫指令字,設置LCD1602的工作方式時:需要把RS置為低電平,RW置為低電平,然后將數據送到數據口D0~D7,最后E引腳一個高脈沖將數據寫入。
② 當我們要寫入數據字,在1602上實現顯示時:需要把RS置為高電平,RW置為低電平,然后將數據送到數據口D0~D7,最后E引腳一個高脈沖將數據寫入。
發現了么,寫指令和寫數據,差別僅僅在于RS的電平不一樣而已。以下是LCD1602的時序圖:
大家要慢慢學會看時序圖,要知道操作一個器件的精華便蘊藏在其中,看懂看準了時序,你操控這個芯片就是非常容易的事了。1602的時序是我見過的一個最簡單的時序:
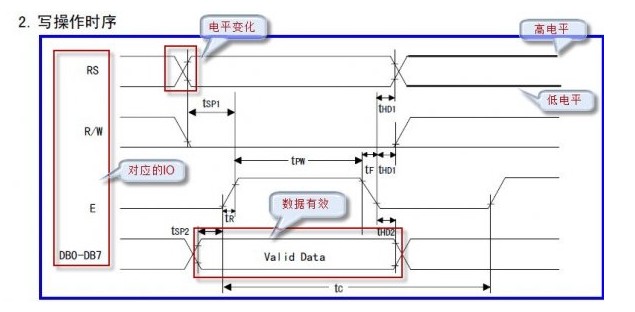
1、注意時間軸,如果沒有標明(其實大部分也都是不標明的),那么從左往右的方向為時間正向軸,即時間在增長。
2、上圖框出并注明了看懂此圖的一些常識:
(1)。時序圖最左邊一般是某一根引腳的標識,表示此行圖線體現該引腳的變化,上圖分別標明了RS、R/W、E、DB0~DB7四類引腳的時序變化。
(2)。有線交叉狀的部分,表示電平在變化,如上所標注。
(3)。應該比較容易理解,如上圖右上角所示,兩條平行線分別對應高低電平,也正好吻合(2)中電平變化的說法。
(4)。上圖下,密封的菱形部分,注意要密封,表示數據有效,Valid Data這個詞也顯示了這點。
3、需要十分嚴重注意的是,時序圖里各個引腳的電平變化,基于的時間軸是一致的。一定要嚴格按照時間軸的增長方向來精確地觀察時序圖。要讓器件嚴格的遵守時序圖的變化。在類似于18B20這樣的單總線器件對此要求尤為嚴格。
4、以上幾點,并不是LCD1602的時序圖所特有的,絕大部分的時序圖都遵循著這樣的一般規則,所以大家要慢慢的習慣于這樣的規則。
也許你還注意到了上面有許多關于時間的標注,這也是個十分重要的信息,這些時間的標注表明了某些狀態所要維持的最短或最長時間。因為器件的工作速度也是有限的,一般都跟不上主控芯片的速度,所以它們直接之間要有時序配合。話說現在各種處理器的主頻也是瘋狂增長,日后搞不好出現個雙核單片機也不一定就是夢話。下面是時序參數表:
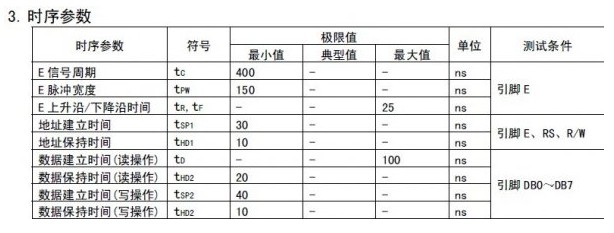
大家要懂得估計主控芯片的指令時間,可以在官方數據手冊上查到MCU的一些級別參數。比如我們現在用AVR M16做為主控芯片,外部12MHz晶振,指令周期就是一個時鐘周期為(2/12MHz)s,所以至少確定了它執行一條指令的時間是us級別的。我們看到,以上給的時間參數全部是ns級別的,所以即便我們在程序里不加延時程序,也應該可以很好的配合LCD1602的時序要求了。怎么看這個表呢?很簡單,我們在時序圖里可以找到TR1,對應時序參數表,可以查到這個是E上升沿/下降沿時間,最大值為25ns,表示E引腳上的電平變化,必須在最大為25ns之內的時間完成。大家看是不是這個意思?
現在我來解讀我對這個時序圖的理解:
當要寫命令字節的時候,時間由左往右,RS變為低電平,R/W變為低電平,注意看是RS的狀態先變化完成。然后這時,DB0~DB7上數據進入有效階段,接著E引腳有一個整脈沖的跳變,接著要維持時間最小值為tpw=400ns的E脈沖寬度。然后E引腳負跳變,RS電平變化,R/W電平變化。這樣便是一個完整的LCD1602寫命令的時序。


一、主時鐘create_clock 1.1 定義 主時鐘是來自FPGA芯片外部的時鐘,通過時鐘輸入端口或高速收發器GT的輸出引腳進入FPGA內部。對于賽...
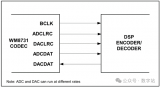
01 整體概括 最近調試了一款音頻采集芯片wm8731,包含兩路音頻輸入(ADC)和一路音頻輸出(DAC),音頻芯片與主控芯片通過I2S接口傳輸ADC采...

隔離有利于提高魯棒性,但同時也會增加發射和接收兩個方向的傳播延遲。必須使該延遲增加一倍,以支持兩個節點參與仲裁。如果系統允許的傳播延遲是固定的,在增加隔...
優化FPGA(現場可編程門陣列)設計的性能是一個復雜而多維的任務,涉及多個方面和步驟。以下是一些關鍵的優化策略: 一、明確性能指標 確定需求 :首先,需...
DDR4(Double Data Rate 4)時序參數是描述DDR4內存模塊在執行讀寫操作時所需時間的一組關鍵參數,它們直接影響到內存的性能和穩定性。...
數字芯片設計驗證經驗分享(第三部分):將ASIC IP核移植到FPGA上——如何確保性能與時序以完成充滿挑戰的
本篇文章是SmartDV數字芯片設計經驗分享系列文章的第三篇,將繼續分享第五、第六主題,包括確保在FPGA上實現所需的性能和時鐘兩個方面的考量因素。

在數字時代,DRAM(動態隨機存取存儲器)扮演著至關重要的角色。它們存儲著我們的數據,也承載著我們的記憶。然而,要正確地操作DRAM并確保其高效運行,了...
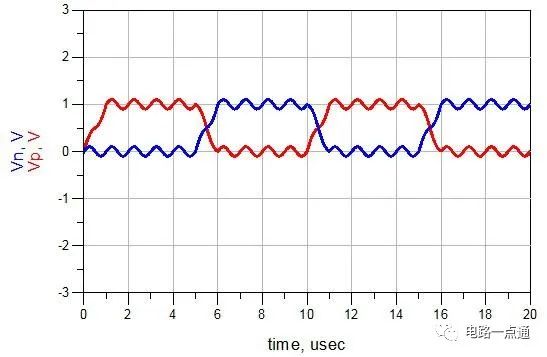
差分信號是一種在電子和通信系統中廣泛使用的信號傳輸方式,它通過比較兩個電信號之間的差異(電壓差)來傳遞信息。與單端信號不同,后者只參考一個單一的電位,差...
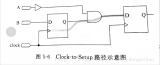
該條路徑包括了觸發器內部clock-to-Q的延遲,觸發器之間的由組合邏輯造成的路徑延遲以及目標觸發器的建立時間,其延時是數據從源觸發器開始,在下一個時...
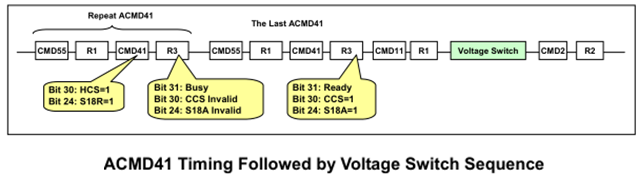
瀚海微SD NAND應用存儲功能描述 3 總線信號電壓和時序
母線信號電壓切換順序: 初始化順序電壓切換命令順序如下方圖所示, 初始化命令順序如圖所示UHS-I主機流程圖。 紅色和黃色框是初始化UHS-I卡的新程序...
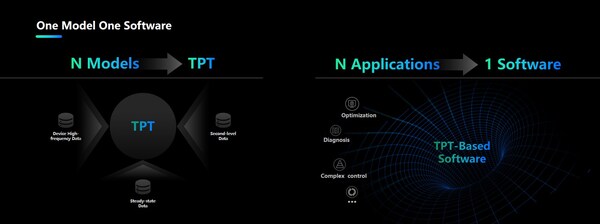
點燃AI引擎,打造工業應用新范式? 杭州2024年6月7日?/美通社/ --?6月5日,由中控技術傾力打造的流程工業首款AI時序大模型TPT(Time-...
1.應用背景 上海電氣國軒新能源科技有限公司(以下簡稱“上海電氣國軒”)長期致力于電化學儲能業務的技術研發、工程應用和市場開拓,實現從電芯到儲能系統的全...
時序數據庫是一種在處理時間序列數據方面具有高效和專門化能力的數據庫。它主要用于存儲和處理時間序列數據,比如傳感器數據、監控數據、物聯網數據和日志數據等。...
其實也很簡單,先把數據線DATA,也就是ONELINE,拉低 6ms 后,發送 8 位數據,先發送低位,再發送高位。使用高電平和低電平比例來表示每個數據...

何為信號完整性的分析信號完整性包含:波形完整性(Waveformintegrity)時序完整性(Timingintegrity)電源完整性(Poweri...

隨著IoT技術逐漸成熟,眾多設備產出的數據呈現指數級增長。企業亟需用行之有效的方式管理海量時序數據。由此,各類時序數據庫開始成為市場寵兒。與市場需求相悖...
在過去的幾年里,我們見證了大型蜂窩網絡在某些方面的巨大轉變。當然,最值得注意的是向5G的過渡。5G是一種更高速,響應更快,更強大的網絡架構。5G實現了更...
DS1624的2線時序規格與I2C不同。本應用筆記詳細介紹了其中的區別。SDA不由DS1624內部保持。總線主站有責任保持SDA,直到SCL的下降沿完成。
此類問題是FPGA設計實現中比較棘手的問題,Xilinx針對7系列及以后的UltraScale/UltraScale+等,提出了UltraFast設計方...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

