完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 機(jī)械臂
機(jī)械臂是指高精度,多輸入多輸出、高度非線性、強(qiáng)耦合的復(fù)雜系統(tǒng)。因其獨(dú)特的操作靈活性,已在工業(yè)裝配、安全防爆等領(lǐng)域得到廣泛應(yīng)用。
文章:342個(gè) 瀏覽:24555次 帖子:48個(gè)
Linux哪吒D1的NodeRed機(jī)械臂控制與拍照(二)
以下是使用node-red實(shí)現(xiàn)的本項(xiàng)目各項(xiàng)重要功能,關(guān)于node-red的安全可以自己參考網(wǎng)上的安裝教程,一般要先安裝node.js,安裝好之后才能正常...
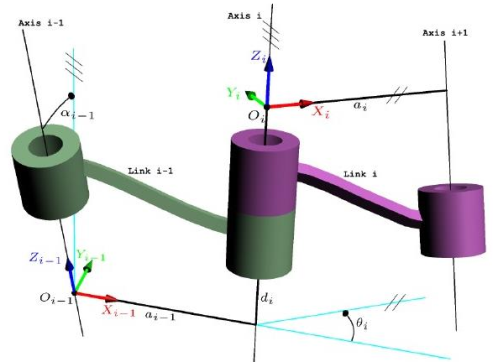
該機(jī)械臂 6 個(gè)關(guān)節(jié)都是轉(zhuǎn)動(dòng)關(guān)節(jié),前 3 個(gè)關(guān)節(jié)確定手腕參考點(diǎn)的位置,后 3個(gè)關(guān)節(jié)確定手腕的方位。和大多數(shù)工業(yè)機(jī)器人一樣,后 3個(gè)關(guān)節(jié)軸線交于一點(diǎn)。因此...
ABB機(jī)器人IRB1410零點(diǎn)計(jì)數(shù)器更新方法教程
簡(jiǎn)介:本節(jié)介紹如何對(duì)每根操縱器軸執(zhí)行粗略校準(zhǔn),即使用FlexPendant更新每根軸的轉(zhuǎn)數(shù)計(jì)數(shù)器值。
2022-10-25 標(biāo)簽:機(jī)器人計(jì)數(shù)器ABB 2646 0
基于STM32、ESP32,鋼鐵俠打造機(jī)械臂設(shè)計(jì)
機(jī)器人一直是稚暉君很感興趣的一個(gè)方向,而在工業(yè)機(jī)器人中他認(rèn)為最實(shí)用的非機(jī)械臂莫屬。
大象機(jī)械臂mechArm pi人臉識(shí)別項(xiàng)目
看過鋼鐵俠的人都知道里面的賈維斯在幫助托尼斯塔克制作裝備的時(shí)候,有許多械臂提供幫助制作裝備,讓裝備的制作提高了效率。賈維斯是一個(gè)超級(jí)強(qiáng)大的人工智能系統(tǒng),...

基于深度強(qiáng)化學(xué)習(xí)的視覺反饋機(jī)械臂抓取系統(tǒng)
機(jī)械臂抓取擺放及堆疊物體是智能工廠流水線上常見的工序,可以有效的提升生產(chǎn)效率,本文針對(duì)機(jī)械臂的抓取擺放、抓取堆疊等常見任務(wù),結(jié)合深度強(qiáng)化學(xué)習(xí)及視覺反饋,...
小車抓取物體時(shí),通過紅外傳感器實(shí)現(xiàn)避障到達(dá)目的地,然后進(jìn)行物體抓取并放到指定位置,此動(dòng)作可自動(dòng)完成,也可通過藍(lán)牙通訊控制完成,使之更加靈活。
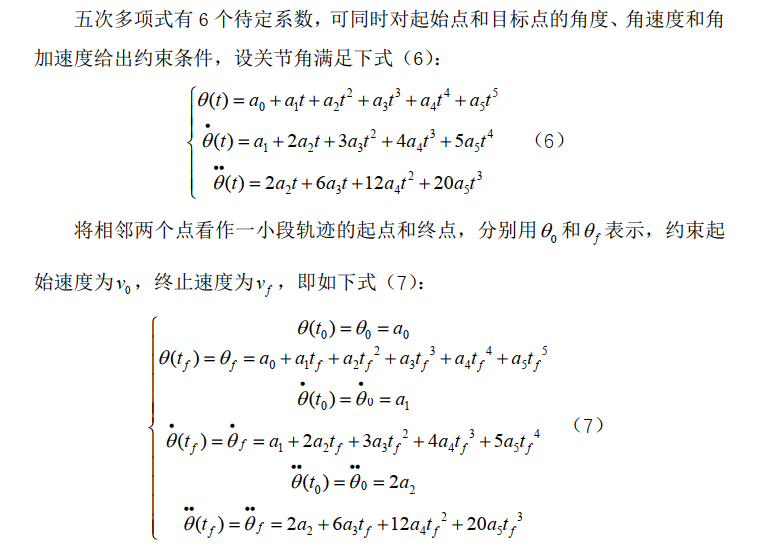
五次多項(xiàng)式插值法 五次多項(xiàng)式有6個(gè)待定系數(shù),可同時(shí)對(duì)起始點(diǎn)和目標(biāo)點(diǎn)的角度、角速度和角加速度給出約束條件。 數(shù)學(xué)推導(dǎo) MATLAB代碼 %五次多項(xiàng)式插值法...

機(jī)器人運(yùn)動(dòng)學(xué)中的非完整約束與運(yùn)動(dòng)模型推導(dǎo)
機(jī)器人運(yùn)動(dòng)學(xué)中的運(yùn)動(dòng)學(xué)約束是指機(jī)器人在運(yùn)動(dòng)過程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些約束會(huì)對(duì)機(jī)器人的自由度產(chǎn)生影響,從而影響機(jī)器人的運(yùn)動(dòng)...
2024-01-18 標(biāo)簽:機(jī)器人機(jī)械臂自動(dòng)駕駛 1868 0

根據(jù)使用的數(shù)據(jù)RGB/Depth不同,又可以分為以下三類:基于RGB,基于RGB+Depth,和基于Depth。

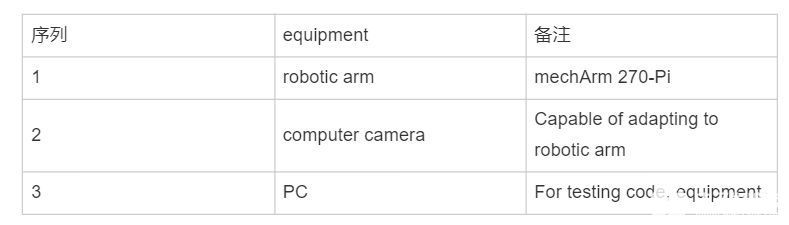
使用一個(gè)桌面型的六軸機(jī)械臂,在機(jī)械臂的末端安裝一個(gè)攝像頭,來進(jìn)行 人臉識(shí)別和跟蹤 的一個(gè)功能。該功能分為兩個(gè)模塊,一個(gè)是 人臉識(shí)別模塊 ,另一個(gè)是 機(jī)械...
以下是磁保持繼電器與普通繼電器的主要區(qū)別: 工作原理 : 普通繼電器 :普通繼電器通常由一個(gè)電磁線圈、一個(gè)或多個(gè)觸點(diǎn)以及一個(gè)機(jī)械臂組成。當(dāng)線圈通電時(shí),產(chǎn)...
使用myCobot 280 Jeston Nano進(jìn)行物體精確識(shí)別追蹤
前言 我們?cè)赮ouTube上看到有人使用機(jī)械臂實(shí)現(xiàn)物體跟蹤功能的視頻時(shí),深受啟發(fā),對(duì)這個(gè)項(xiàng)目產(chǎn)生了濃厚的興趣,并決定獨(dú)立開發(fā)一個(gè)類似的程序。 我們的目標(biāo)...

教育場(chǎng)景中的自動(dòng)化分揀系統(tǒng)!基于大象機(jī)器人UltraArm P340機(jī)械臂和傳送帶的實(shí)現(xiàn)
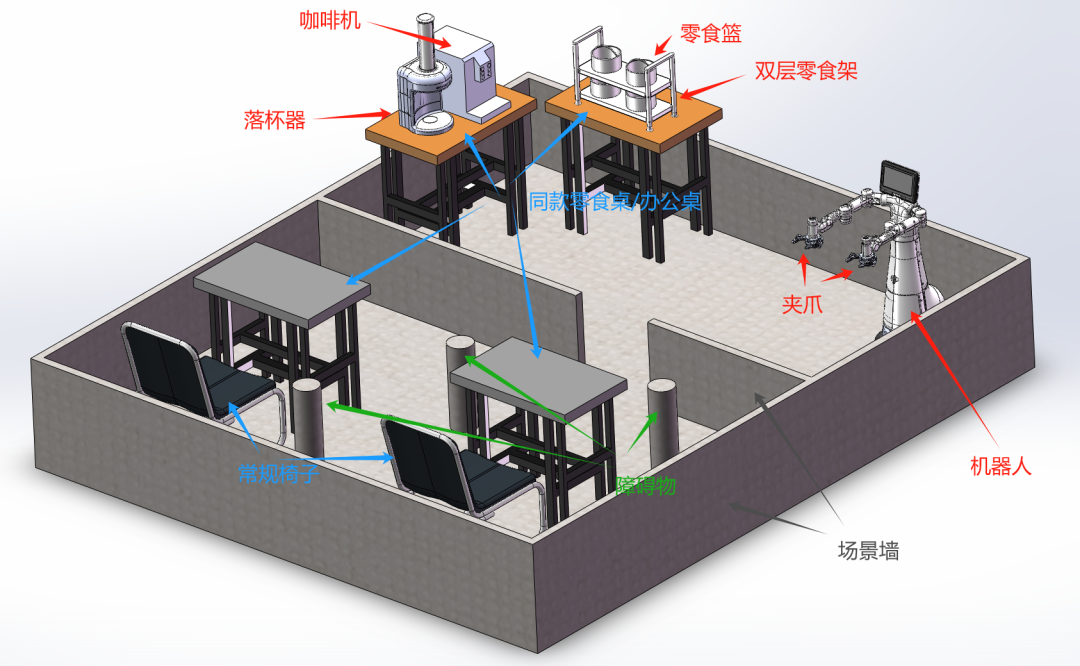
引言 今天我們將展示一個(gè)高度自動(dòng)化的模擬場(chǎng)景,展示多個(gè)機(jī)械臂與傳送帶協(xié)同工作的高效分揀系統(tǒng)。在這個(gè)場(chǎng)景中,機(jī)械臂通過視覺識(shí)別技術(shù)對(duì)物體進(jìn)行分類,并通過精...

使用myCobot和OAK-D OpenCV DepthAI攝像頭制作一個(gè)可以在眼前始終享受視頻的手機(jī)支架!
引言 由于YouTube和Netflix的出現(xiàn),我們開始躺著看手機(jī)。然而,長(zhǎng)時(shí)間用手拿著手機(jī)會(huì)讓人感到疲勞。這次我們制作了一個(gè)可以在你眼前保持適當(dāng)距離并...

在Eye-to-Hand系統(tǒng)中,視覺成像單元安裝在機(jī)器人本體外的固定位置,在機(jī)器人工作過程中不隨機(jī)器人一起運(yùn)動(dòng),當(dāng)機(jī)器人或目標(biāo)運(yùn)動(dòng)到機(jī)械臂可操作的范圍時(shí)...
人形機(jī)器人場(chǎng)景應(yīng)用全解析,2024睿抗 AI ROBOT創(chuàng)新挑戰(zhàn)賽火熱報(bào)名中!
人工智能(AI)已成為推動(dòng)科技革命和產(chǎn)業(yè)變革的關(guān)鍵力量。隨著大模型等AIGC技術(shù)的迅猛發(fā)展,AI正深刻改變我們的生活并重新定義生產(chǎn)方式。越來越多人期望將...
在工坊平臺(tái),常常會(huì)有企業(yè)老板聯(lián)系我們,希望工坊能夠快速幫忙對(duì)接相應(yīng)人才,以幫忙解決項(xiàng)目中棘手的難題,比如機(jī)械臂抓取、相機(jī)標(biāo)定、缺陷檢測(cè)、點(diǎn)云后處理、三維...

如何微控制器上新建MicroROS節(jié)點(diǎn)
你好,我是愛吃魚香ROS的小魚。上一節(jié)我們介紹了MicroROS和Agent的安裝,本節(jié)我們開始正式編寫代碼,接入ROS2。
2023-07-15 標(biāo)簽:微控制器Micro學(xué)習(xí)板 1396 0

機(jī)械臂視覺控制技術(shù)是一種應(yīng)用廣泛、發(fā)展迅速的技術(shù)。相比傳統(tǒng)的機(jī)械臂控制技術(shù),機(jī)械臂視覺控制技術(shù)具有高效、精準(zhǔn)、靈活等優(yōu)勢(shì),可以在工業(yè)生產(chǎn)、制造、物流等領(lǐng)...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1

