完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > can
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,并最終成為國際標準(ISO 11898),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。
文章:1683個 瀏覽:463902次 帖子:1837個
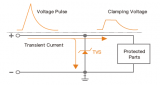
汽車電子系統(tǒng)中關(guān)于TVS二極管的應(yīng)用
在汽車電子中,CAN 通訊口、電源入口,往往可能因為閃電雷擊、發(fā)動機點火脈沖而遭受很高的尖峰脈沖電壓,如果能量不能被吸收,高電壓就可能對設(shè)備內(nèi)部造成永久性損害。
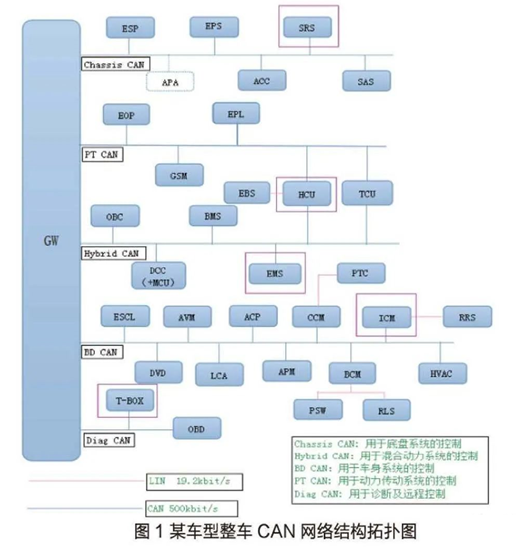
線束設(shè)計如何滿足整車CAN網(wǎng)絡(luò)布置要求
電動汽車各個模塊之間的交互有效性直接影響了汽車的行駛效率和駕駛感。而插電式混合動力汽車根據(jù)電力驅(qū)動系統(tǒng)和發(fā)動機動力系統(tǒng)的布局形式可以分為3類:串聯(lián)式、并...

在之前的文章中,小編介紹了幾種常見的短距離無線通信傳輸技術(shù)和低功耗廣域網(wǎng)絡(luò)(LPWAN),后面的幾期文章將分享常見的有線傳輸方式,如CAN總線、串口通信...
我們知道,CAN總線上的每個節(jié)點往總線上發(fā)送數(shù)據(jù)的同時,會讀取總線上的數(shù)據(jù),并與自己發(fā)送的數(shù)據(jù)作對比。
照理來說,USB-CAN這種東西應(yīng)該已經(jīng)被做的爛大街的工具,國內(nèi)居然沒有一個拿得出手的開源方案。某立功和PCAN動輒2000+的價格也是離譜。淘寶上各種...

使用ECAN-401實現(xiàn)ModBus轉(zhuǎn)CAN教程
首先,在開始實例演示前,我們需要了解ECAN-401設(shè)備是怎么實現(xiàn)CAN轉(zhuǎn)ModBus通信的:ECAN-401在串口側(cè)使用的是標準ModBus RTU協(xié)...

基于模型的設(shè)計為下一代救援梯開發(fā)控制系統(tǒng)
在我們?yōu)樯弦淮仍菰O(shè)計控制系統(tǒng)時,當時可用的控制硬件較為有限。因此,我們需要將控制軟件分布到六個 ECU 上。為了滿足安全要求,我們還需要布線和其他組...
CAN報文自定義協(xié)議轉(zhuǎn)發(fā)操作原理及步驟
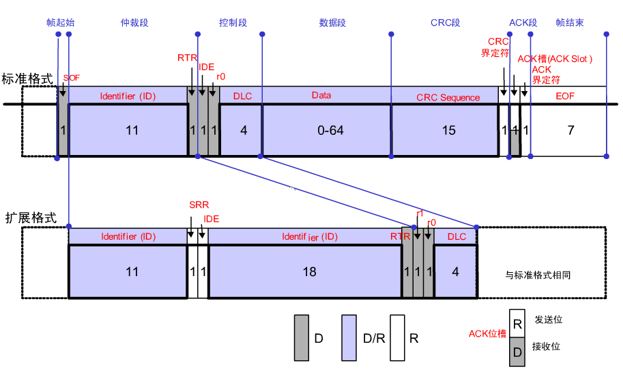
串行幀中所帶有的CAN報文的“幀 ID”在串行幀中的起始地址和長度可由配置設(shè)定。起始地址的范圍是0~7,長度范圍分別是1~2(標準幀)或1~4(擴展幀)。
CAN(控制器局域網(wǎng))是一種與汽車和工業(yè)應(yīng)用高度相關(guān)的通信技術(shù)。隨著附加功能被集成到這些應(yīng)用中,對更復(fù)雜網(wǎng)絡(luò)和更快速數(shù)據(jù)速率的需求正在增加。這兩種需求都...
控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實時應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號,是世界上應(yīng)用...
嵌入式環(huán)形隊列和消息隊列是如何去實現(xiàn)的?
嵌入式環(huán)形隊列和消息隊列是實現(xiàn)數(shù)據(jù)緩存和通信的常見數(shù)據(jù)結(jié)構(gòu),廣泛應(yīng)用于嵌入式系統(tǒng)中的通信協(xié)議和領(lǐng)域。
2023-05-20 標簽:嵌入式系統(tǒng)CAN無線通信 1141 0
CAN 是控制器局域網(wǎng)絡(luò) (Controller Area Network) 的簡稱,它是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國 BOSCH 公司開發(fā)的,并...
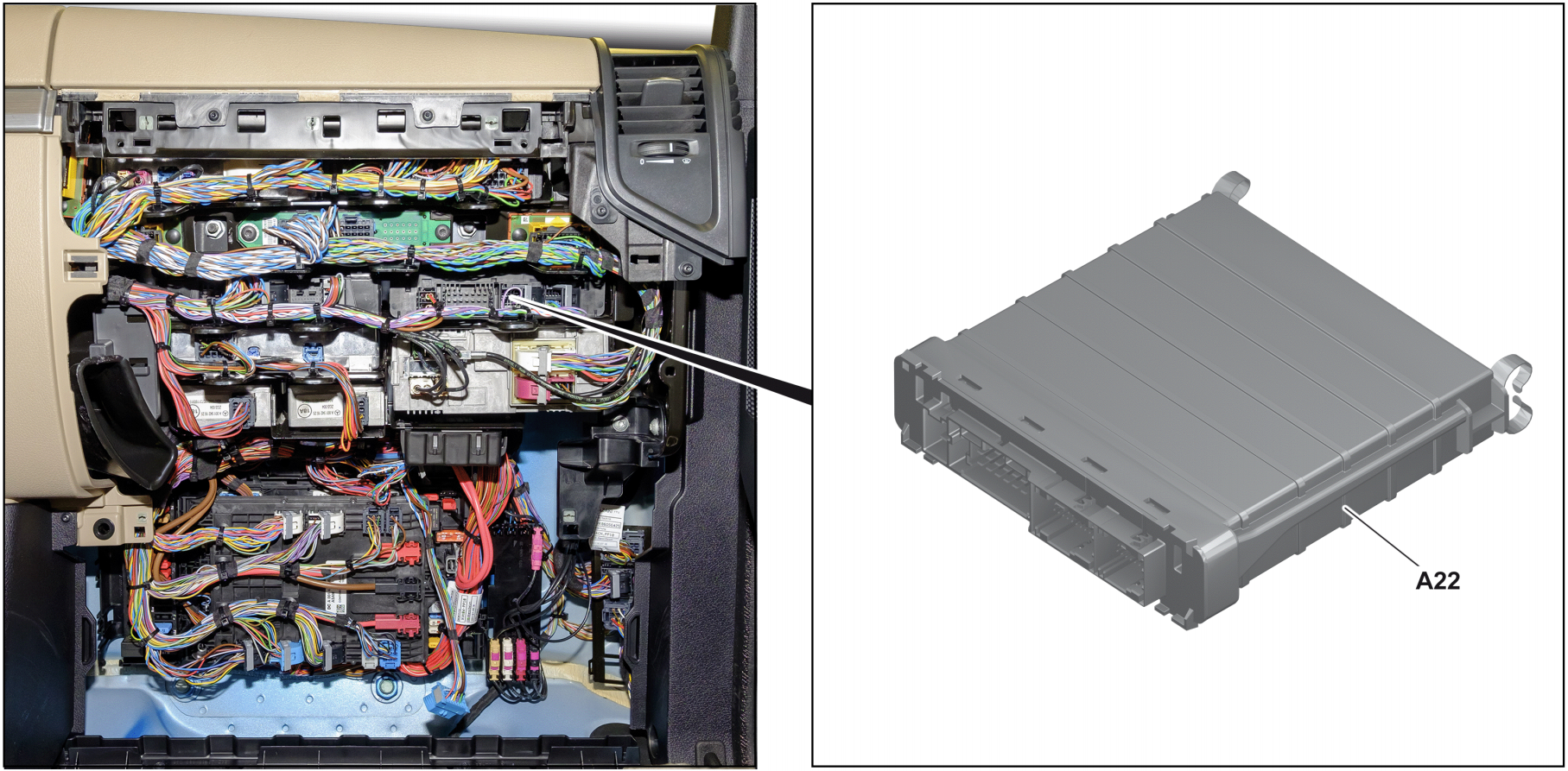
防盜鎖止系統(tǒng)不是控制單元,而是一種功能。它包括:1、將控制單元的防盜特征存入中央數(shù)據(jù)庫中,2、內(nèi)部集成了防盜鎖止系統(tǒng)的舒適系統(tǒng)中間控制單元與其他組件進行...
2023-05-18 標簽:CAN遠程控制車聯(lián)網(wǎng) 323 0

在當今汽車行業(yè)瘋狂內(nèi)卷的時代,各車企均把大量精力花費在那些用戶可以第一時間感知到的功能上。
今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計,由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架...
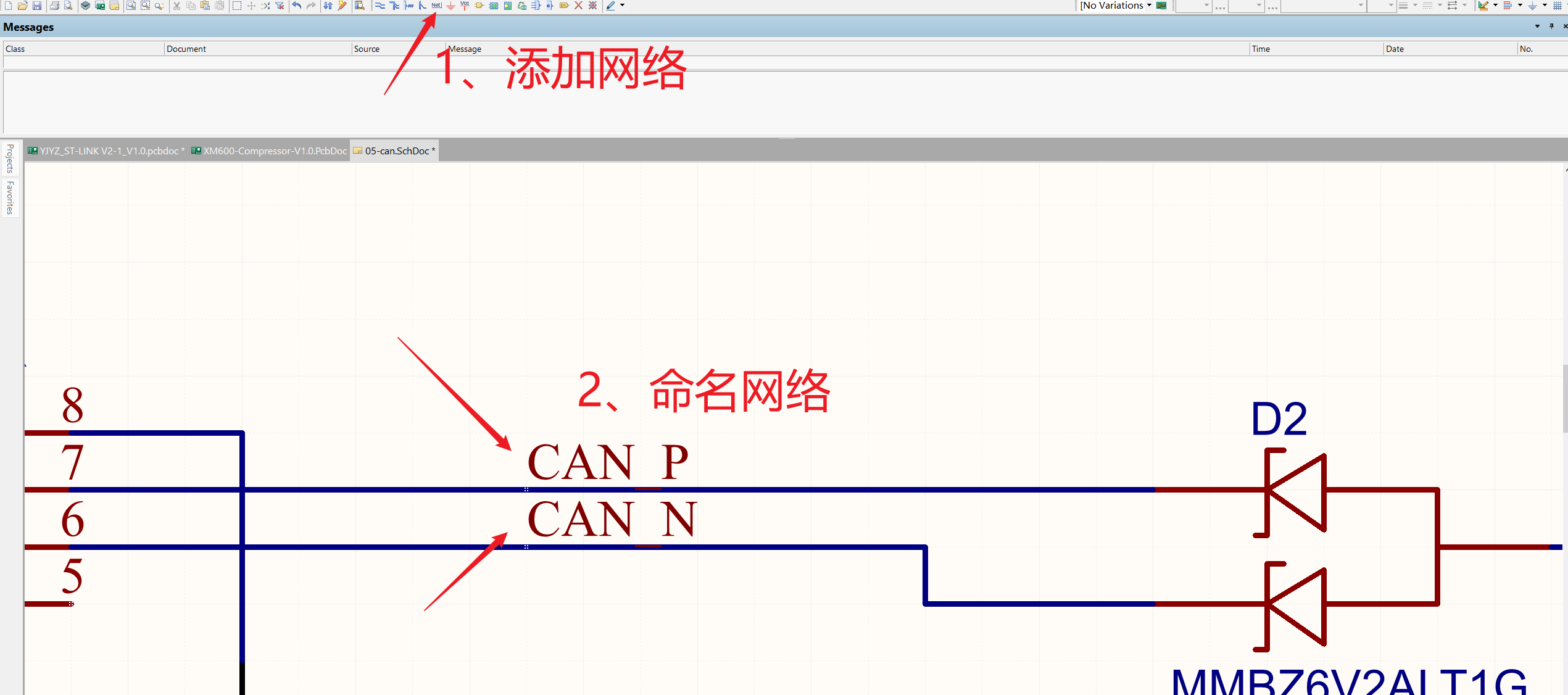
Altium Designer(AD16)怎么設(shè)置差分走線
以差分傳輸線CAN總線為列,首先對差分線添加網(wǎng)絡(luò):CAN_P CAN_N,這里的中重點是差分的后綴一定要是_P _N 否則無法識別。
CAN總線在設(shè)計之初,就規(guī)定了物理層CAN_H和CAN_L采用雙絞線差分傳輸,這樣做的目的是提高抗干擾能力,因為當總線上CAN_H與CAN_L遇到干擾可...
使用三線制信號線(CAN_H,CAN_L,CAN_GND)傳輸,并且將所有節(jié)點的CAN收發(fā)器的信號共地,這樣可以有效抑制共模干擾。
速銳得解碼奔馳Actros 系列網(wǎng)關(guān)CAN總線應(yīng)用車載互聯(lián)微系統(tǒng)
近年來,改變信號處理方式的低成本高速電子電路和制造技術(shù)的進步推動了傳感技術(shù)的發(fā)展。借助這些協(xié)同領(lǐng)域內(nèi)的新發(fā)展,傳感器和制造商可以采用一套全新的方法,如遠...
2023-05-16 標簽:傳感器CAN網(wǎng)關(guān) 1254 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1



