完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > SLAM
SLAM (simultaneous localization and mapping),也稱為CML (Concurrent Mapping and Localization), 即時定位與地圖構(gòu)建,或并發(fā)建圖與定位。問題可以描述為:將一個機(jī)器人放入未知環(huán)境中的未知位置
文章:435個 視頻:28個 瀏覽:32310次 帖子:26個

三維高斯?jié)姙R大規(guī)模視覺SLAM系統(tǒng)解析
近期興起的神經(jīng)輻射場(NeRF)與三維高斯?jié)姙R(3DGS)技術(shù)在視覺SLAM中展現(xiàn)出令人鼓舞的突破性成果。然而,當(dāng)前主流方法多依賴RGBD傳感器...
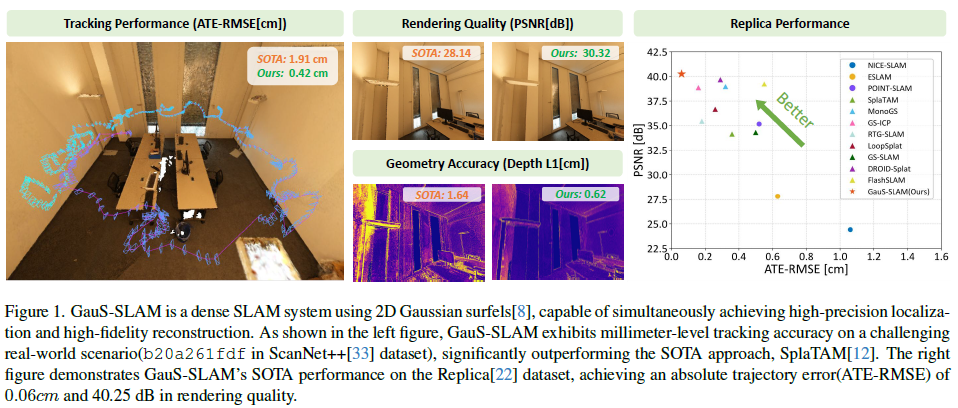
基于高斯的場景表示在新視角下會出現(xiàn)幾何失真,這大大降低了基于高斯的跟蹤方法的準(zhǔn)確性。這些幾何不一致主要源于高斯基元的深度建模以及在深度融合過程中表面之間...

一種基于點、線和消失點特征的單目SLAM系統(tǒng)設(shè)計
本文提出了一種穩(wěn)健的單目視覺SLAM系統(tǒng),該系統(tǒng)同時利用點、線和消失點特征來進(jìn)行精確的相機(jī)位姿估計和地圖構(gòu)建,有效解決了傳統(tǒng)基...
本文提出了一種即插即用的單目SLAM系統(tǒng),能夠在15FPS的幀率下生成全局一致的位姿和稠密幾何圖形。 01 ? 本文核心內(nèi)容 視覺SLAM乃是當(dāng)今機(jī)器人...

如何讓多相機(jī)視覺SLAM系統(tǒng)更易于部署且對環(huán)境更具魯棒性?本文提出了一種適用于任意排列多相機(jī)的通用視覺里程計系統(tǒng)。在KITTI-360和MultiC...
在SLAM中評估大規(guī)模的點云地圖仍頗具挑戰(zhàn),主要原因在于缺乏統(tǒng)一、穩(wěn)健且高效的評估框架。本文提出了MapEval,這是一個用于點云地圖綜合評估的開源框架.....

本文提出了一種新方法,通過使用點到平面匹配將VIO/VSLAM系統(tǒng)生成的稀疏3D點云與數(shù)字孿生體進(jìn)行對齊,從而實現(xiàn)精確且全球一致的定位,無需視覺數(shù)...

隨著自動駕駛技術(shù)的迅速發(fā)展,車輛在不同環(huán)境中的定位與導(dǎo)航需求愈加迫切,自動駕駛的核心任務(wù)是讓車輛在未知或動態(tài)變化的環(huán)境中安全、智能...

一、文章概述 1.1 摘 要 即時定位與地圖構(gòu)建(simultaneous localization and mapping,SLAM)是自主移動機(jī)器人...

鐳神智能機(jī)器人3D SLAM無人叉車應(yīng)用案例:國內(nèi)知名移動電源企業(yè)的智能化升級
在當(dāng)今快速發(fā)展的消費(fèi)電子市場中,企業(yè)對于生產(chǎn)效率和成本控制的要求日益嚴(yán)格。某知名移動電源企業(yè)是一家專業(yè)生產(chǎn)戶外儲...
使用Bittle和Raspberry Pi 4的ROS SLAM立即下載
類別:電子資料 2023-06-14 標(biāo)簽:機(jī)器人SLAMRaspberry Pi 594 0
思嵐科技與上海交大電院科協(xié)第十屆“新生杯”科技創(chuàng)新大賽圓滿落幕
當(dāng)科技與青春碰撞,當(dāng)算法與賽道交織,一場屬于創(chuàng)新者的盛宴在上海交通大學(xué)E谷·競技廣場順利舉行!
部署聯(lián)核無人叉車到底有多簡單 居然拉著agv機(jī)器人走一圈就行
在傳統(tǒng)工業(yè)自動化改造中,AGV無人叉車機(jī)器人設(shè)備的部署往往需要專業(yè)團(tuán)隊耗時數(shù)周完成場地測繪、網(wǎng)絡(luò)搭建和系統(t...
智能投遞分揀機(jī)器人采用激光SLAM導(dǎo)航技術(shù)
在電商爆發(fā)式增長與即時配送需求激增的當(dāng)下,物流分揀中心正面臨一場效率與成本的極限博弈。傳統(tǒng)人工分揀效率低、錯誤率高,而自動化設(shè)備又常受限于靈活性不足。面...

慶陽市西峰區(qū)與鐳神智能交流,共探產(chǎn)業(yè)合作新機(jī)遇
今日,北京大學(xué)深圳研究生院黨委副書記兼紀(jì)委書記,掛職甘肅省慶陽市西峰區(qū)委常委、副區(qū)長戚國偉帶領(lǐng)慶陽市西峰區(qū)招商引資促進(jìn)中心主任周鼎、惠峰...
探秘鐳神智能3D SLAM無人叉車:激光雷達(dá)如何鑄就全方位立體安全防護(hù)
在科技飛速發(fā)展的今天,自動駕駛技術(shù)不僅在汽車領(lǐng)域大放異彩,在工業(yè)物流的無人叉車身上也展現(xiàn)出了強(qiáng)大的應(yīng)用潛力。2月20日,鴻蒙...

托盤“智”運(yùn),SLAM導(dǎo)航 地牛式AGV機(jī)器人,“7*24小時”工作!
AGV地牛小巧靈活,載重大,采用激光SLAM導(dǎo)航,可智能控制路線。支持定制化云平臺監(jiān)控,多級安全措施保障安全。適用于多行業(yè)倉儲物流,提高搬運(yùn)效率,降低人力投入。

富唯智能賦能上下料搬運(yùn),倉庫轉(zhuǎn)運(yùn)自動化駛?cè)?“快車道”
近年來,國內(nèi)制造業(yè)領(lǐng)域掀起了一股智能化改造的浪潮,眾多工廠紛紛采納富唯智能提供的先進(jìn)物流解決方案,這一舉措顯著優(yōu)化了生產(chǎn)流程,實現(xià...
鐳神智能3D SLAM無人叉車獲多個行業(yè)榮耀加冕,引領(lǐng)智能制造與智慧物流行業(yè)創(chuàng)新!
在這個科技日新月異的時代,人工智能正以破竹之勢賦能各行各業(yè),而鐳神智能作為激光雷達(dá)與智能搬運(yùn)機(jī)器人(無人叉車)領(lǐng)域的佼佼者,更是憑借其卓越的技術(shù)...

利用VLM和MLLMs實現(xiàn)SLAM語義增強(qiáng)
語義同步定位與建圖(SLAM)系統(tǒng)在對鄰近的語義相似物體進(jìn)行建圖時面臨困境,特別是在復(fù)雜的室內(nèi)環(huán)境中。本文提出了一種面向?qū)ο骃LAM的語義增強...
激光雷達(dá)SLAM:全面掌握同步定位與地圖構(gòu)建指南
? SLAM 背后的核心思想是讓機(jī)器人或自主系統(tǒng)能夠探索未知環(huán)境并創(chuàng)建該環(huán)境的地圖,同時確定其在生成的地圖中的位置。這是通過融合來自各種傳感...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題 教程专题
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1

