 電子發(fā)燒友App
電子發(fā)燒友App


01
網(wǎng)絡(luò)管理初識
為了更加通俗易懂地介紹網(wǎng)絡(luò)管理,先來構(gòu)建一個例子來進行說明,如下所示:
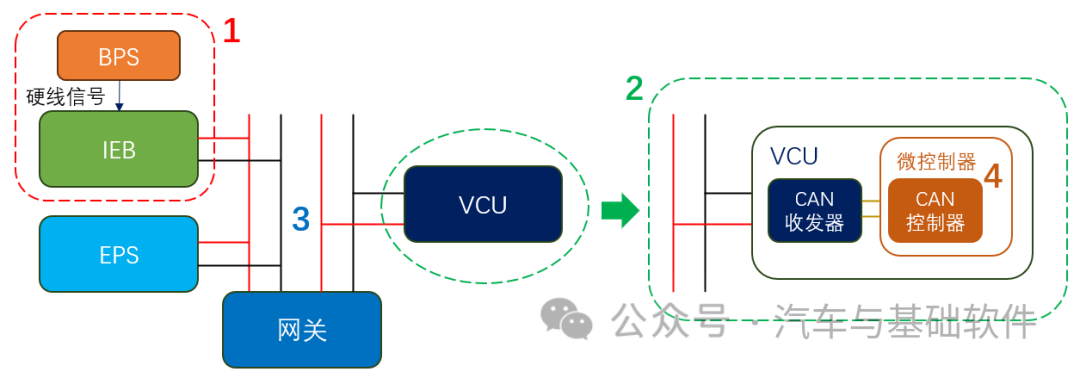
對該圖稍作說明:
對于一個控制器而言,它可能存在多種喚醒源,包括本地喚醒和網(wǎng)絡(luò)喚醒等方式,圖中這兩種方式都存在;?? ?
對于一個控制器參與CAN通訊,其他硬件組成有CAN收發(fā)器,CAN控制器和微控制器;
不同CAN總線網(wǎng)絡(luò)通過網(wǎng)關(guān)才能進行通訊。
當整車處于休眠狀態(tài),即所有的控制器都睡覺了,在整車某個休眠喚醒場景下,制動踏板行程傳感器BPS感知到變化了,從而喚醒的硬線信號有了變化,被IEB檢測到了,那么處于休眠的IEB將被喚醒,對應(yīng)著圖中1區(qū)域,這里IEB稱為主動喚醒節(jié)點。
此時,為了實現(xiàn)這個喚醒場景的功能,需要參與其他一些控制器,比如EPS和VCU,稱為它倆為被動喚醒節(jié)點,這就意味著IEB需要去喚醒他倆。如果采用CAN總線的喚醒方式,則IEB可以通過網(wǎng)管報文去喚醒EPS和VCU,大致過程是:IEB被傳感器BPS喚醒后,它的網(wǎng)絡(luò)管理狀態(tài)會產(chǎn)生變化,由睡覺模式轉(zhuǎn)為網(wǎng)絡(luò)模式。
然后IEB會發(fā)出網(wǎng)管報文,EPS和VCU的CAN收發(fā)器會收到該網(wǎng)管報文,識別到需要喚醒,最后它們也會發(fā)網(wǎng)管報文,告訴IEB醒來了,可以一起搞事情,對應(yīng)到上圖的234部分。
在這個過程中,實現(xiàn)其實很復雜,有幾個層面的問題值得深入探究:
一是功能層面,整車哪些功能有休眠喚醒場景?誰是主動喚醒節(jié)點,誰是被動喚醒節(jié)點?
二是控制器層面:對于每個休眠喚醒場景,主動喚醒節(jié)點是怎么被喚醒,被動喚醒節(jié)點又是怎么被總線喚醒的?關(guān)于網(wǎng)絡(luò)管理狀態(tài)機,這些控制器之間是如何管理網(wǎng)絡(luò)狀態(tài)?關(guān)于網(wǎng)絡(luò)管理報文,IEB發(fā)送網(wǎng)管報文應(yīng)該是怎樣的?而EPS和VCU的又是怎樣的?
02
為什么需要網(wǎng)絡(luò)管理?
在回答上面的這些問題之前,先弄清楚下整車為什么需要進行網(wǎng)絡(luò)管理,我們知道隨著汽車行業(yè)的快速發(fā)展,從燃油車到混動車和純電動車,從傳統(tǒng)的機械鑰匙到遙控鑰匙再到無鑰匙進入PEPS,汽車部署控制器越來越多。下面列舉上世紀和當今汽車的整車網(wǎng)絡(luò)拓撲:
Source: Global B 電子電氣架構(gòu),預示了通用的下一個十年。
Source: Global B 電子電氣架構(gòu),預示了通用的下一個十年。
不難理解,越來越多的控制器部署到汽車電子電器架構(gòu),意味著可以實現(xiàn)更多的功能,同時也意味著更多的能量消耗。另外,日益復雜的網(wǎng)絡(luò)拓撲對控制器間如何協(xié)同工作提出巨大的挑戰(zhàn)。為了節(jié)能減小耗電,某些時刻不需要工作的控制器應(yīng)該休眠;但某些時刻,又需要休眠的控制器立馬醒來參與工作。因此,需要一種控制機制或策略,即網(wǎng)絡(luò)管理策略,使得通訊拓撲網(wǎng)絡(luò)中的ECU節(jié)點能有序地休眠和喚醒,這樣就可以保證汽車功能的同時盡可能節(jié)省電量。
03
結(jié)合硬件來了解喚醒
當車輛處于長時間停止使用或待機狀態(tài)時,控制器會進入休眠模式以降低功耗。在需要時,控制器又能被喚醒以響應(yīng)特定事件或指令,如車門開關(guān)、遙控鑰匙信號等。這里,首先涉及到喚醒源,然后喚醒源作用在控制器硬件,最后一個控制器通過CAN總線網(wǎng)絡(luò)作用到另外的控制器,下面來詳細了解這些內(nèi)容。
3.1 喚醒源
先聊下喚醒源,常見的喚醒源有:本地喚醒,網(wǎng)絡(luò)喚醒和RTC喚醒等。本地喚醒是指某些控制器可以通過特定的觸發(fā)信號被喚醒,比如KL15硬線,某些傳感器喚醒引腳信號。當這些觸發(fā)信號被檢測到時,控制器可以被喚醒以執(zhí)行相應(yīng)的操作。
1)KL15硬線喚醒
KL15是汽車電子中的一個標準電源信號,常用于控制器的供電。KL15硬線信號在車輛點火時處于高電平狀態(tài),表示電源已連接。KL15硬線喚醒是指通過監(jiān)測KL15信號的狀態(tài)變化來喚醒控制器或其他電子模塊,并開始執(zhí)行相應(yīng)的操作,例如初始化或執(zhí)行特定任務(wù)等。下圖所示是一種最常見的KL15硬線喚醒方式。
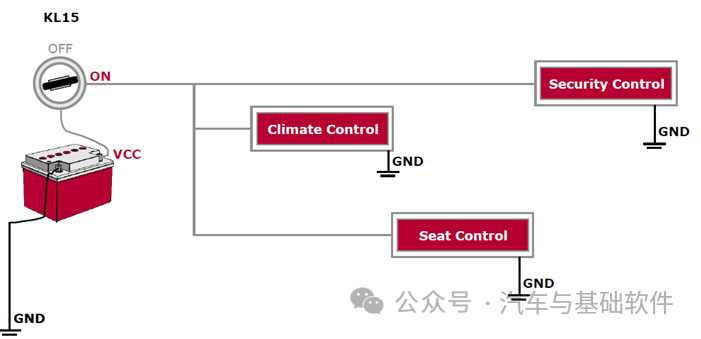
Source: KL15和KL30 - Smah - 博客園 (cnblogs.com)
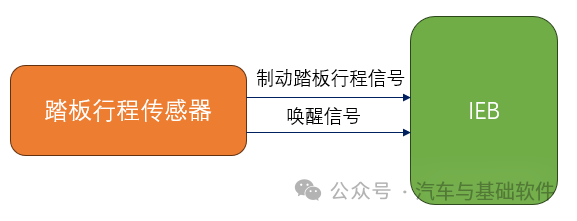
2)傳感器喚醒
做底盤域控開發(fā)時,就碰到制動踏板傳感器有喚醒引腳。某些工況下,駕駛員踩制動踏板,制動踏板傳感器感知到后,通過其喚醒引腳以硬線形式去喚醒某些控制器,比如IEB,從而及時觸發(fā)這些車輛穩(wěn)定性控制系統(tǒng)或防抱死制動系統(tǒng)等安全系統(tǒng)的操作。
3)CAN網(wǎng)絡(luò)喚醒
CAN網(wǎng)絡(luò)喚醒源是指能夠通過CAN總線發(fā)送網(wǎng)絡(luò)報文,以喚醒處于休眠狀態(tài)的設(shè)備或模塊。這些網(wǎng)絡(luò)報文可以是預定義的標準報文,也可以是自定義的擴展報文。接收到特定的喚醒報文后,設(shè)備或模塊會解析該報文并進行相應(yīng)的喚醒操作。比如,當CAN收發(fā)器監(jiān)控到總線電平變化或者特定報文時,就可以通過INH引腳使能電源芯片供電,從而喚醒ECU。
Source: 你知道BMS有哪些內(nèi)外部的喚醒信號嗎 (zhihu.com)
CAN網(wǎng)絡(luò)喚醒從喚醒方式來進一步劃分的話,可以分為:
喚醒幀(Wake-up Frame):CAN網(wǎng)絡(luò)中的節(jié)點可以通過發(fā)送喚醒幀來喚醒其他節(jié)點或整個系統(tǒng)。喚醒幀是一種特殊的CAN數(shù)據(jù)幀,它包含喚醒標識符和相關(guān)的控制信息,用于告知接收節(jié)點進行喚醒操作。
連續(xù)監(jiān)聽(Continuous Listening):某些CAN網(wǎng)絡(luò)實現(xiàn)中,節(jié)點可以設(shè)置為持續(xù)監(jiān)聽CAN總線,以偵聽特定的喚醒幀或其他相關(guān)報文。當接收到指定的報文時,節(jié)點將執(zhí)行喚醒操作。
4)RTC喚醒
RTC喚醒(Real-Time Clock Wakeup)是一種可以在預定的時間點或間隔后喚醒控制器的喚醒方式。在汽車中,RTC喚醒通常用于控制器的定時操作,通過配置RTC喚醒功能,可以在設(shè)定的時間點喚醒相關(guān)控制器,以執(zhí)行特定的任務(wù)或操作。例如,BMS可以利用RTC喚醒來進行電池狀態(tài)監(jiān)測、數(shù)據(jù)記錄等操作,以確保電池在休眠期間得到適當?shù)墓芾砗捅Wo。
Source: 大普通信高精度高可靠性RTC,為新能源汽車BMS安全管理助力 (laoyaoba.com)
3.2 控制器相關(guān)硬件?
喚醒源作用到控制器硬件后,有可能直接喚醒微控制器,也有可能經(jīng)電源芯片間接喚醒微控制器,可以先了解下汽車控制器硬件的組成,其通常由微處理器和相關(guān)的傳感器和執(zhí)行器組成。汽車控制器實物如下圖所示,上面有很多芯片和電子元器件,它們能夠?qū)崿F(xiàn)怎么的功能呢?

簡化一下大概像下圖這樣:?
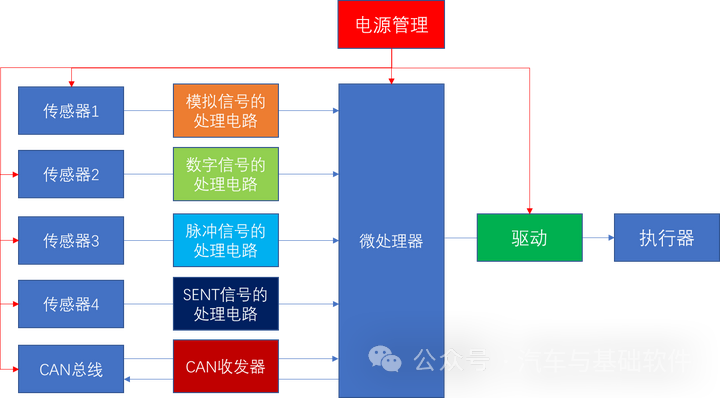
控制器的功能有電源管理,傳感器信號采集,執(zhí)行器驅(qū)動和通訊等功能,對于CAN通訊功能的硬件部分,通常由CAN總線,終端電阻,CAN收發(fā)器,CAN控制器和微控制器組成,如下示意:
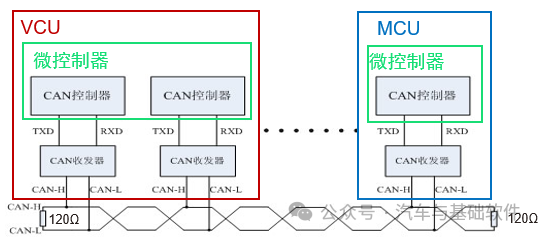
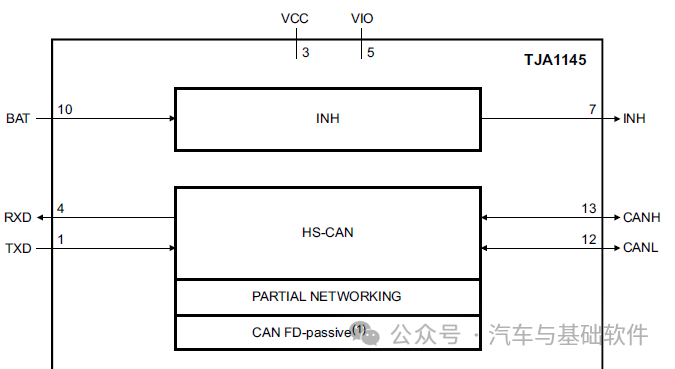
在控制器上,CAN總線就不是雙絞線形式,而是CAN-H和CAN-L兩個PIN腳接入;終端電阻可能沒有而在其他控制器上,CAN收發(fā)器一定有。CAN收發(fā)器最主要作用是提供物理層的接口功能和進行信號轉(zhuǎn)換。當接收報文時,將輸入的差分電壓轉(zhuǎn)化成邏輯電平(顯性/隱性);當發(fā)送報文時,將邏輯電平轉(zhuǎn)換成差分電壓輸出。而涉及到網(wǎng)絡(luò)喚醒的話,那么它能夠接收、解析和處理喚醒信號,實現(xiàn)對休眠節(jié)點的喚醒操作,通常操作是使能電源芯片給微控制器上電的作用。
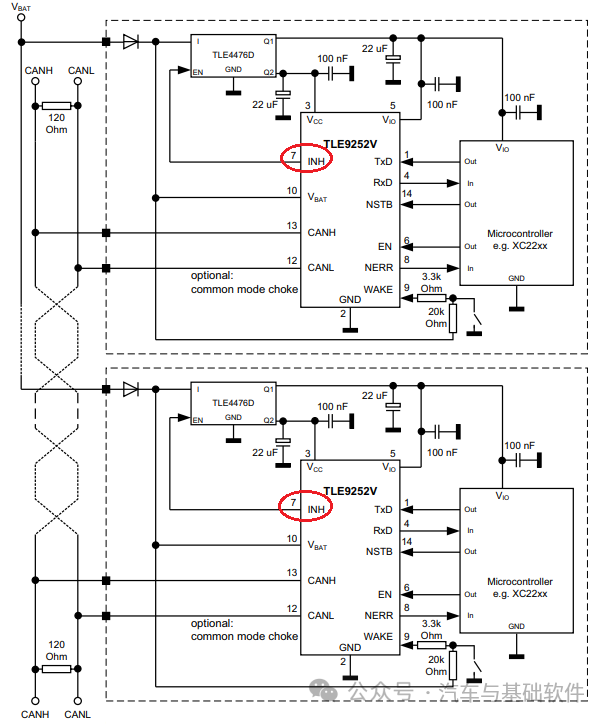
在硬件層面,CAN收發(fā)器常見于2種形式,一種是作為一塊獨立的芯片,如下圖示意;另一種是被集成到某些芯片,比如集成到SBC中。
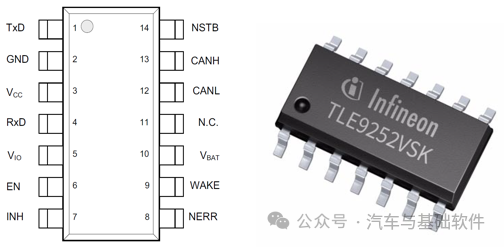
Source:TLE9252手冊
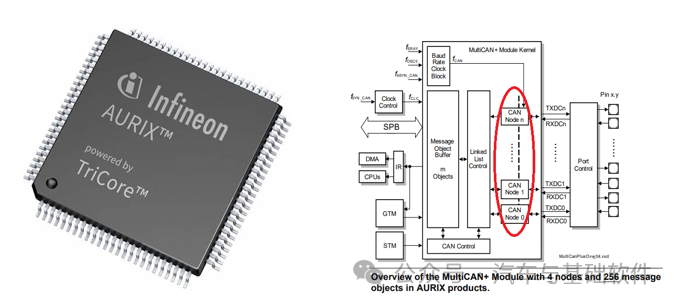
CAN控制器的作用是管理CAN總線上的通信活動。它負責處理消息的發(fā)送和接收,確保消息的正確性、完整性和時序性。CAN控制器通常集成在微控制器或通信芯片中,用于與其他CAN節(jié)點進行通信,通常一個微控制器中包括多個CAN控制器,如下示意的英飛凌TC系列芯片就有幾個。
由這些器件構(gòu)成的CAN通訊硬件,常見的一種C網(wǎng)絡(luò)喚醒方式是這樣:通過CAN收發(fā)器的喚醒引腳或中斷功能來觸發(fā)喚醒信號,然后使用喚醒信號來激活電源芯片,再由電源芯片提供電源給微控制器。這種方式中,當CAN收發(fā)器接收到特定的喚醒幀或觸發(fā)條件時,會通過喚醒引腳發(fā)送喚醒信號給電源芯片,激活電源芯片以為微控制器提供電源。
結(jié)合之前的本地喚醒源和當下的整車通訊網(wǎng)絡(luò)架構(gòu),喚醒機制通常是:本地喚醒某個控制器,然后這個控制器再通過CAN網(wǎng)絡(luò)喚醒其所在總線的相關(guān)其他控制器,這樣喚醒的這些控制器共同來實現(xiàn)某一個功能。比如鎖車休眠之后插槍交流充電工況,CP硬線信號喚醒OBC,OBC再發(fā)送網(wǎng)絡(luò)管理報文喚醒BMS等控制器,最終實現(xiàn)交流充電功能。
04
休眠喚醒表
接著從整車休眠喚醒功能層面來進行介紹,上面的IEB例子僅是眾多休眠喚醒場景中的一個,再多看兩個例子:
一臺純電動汽車關(guān)門鎖車下電后進入休眠,在它處于休眠這期間,實際上存在很多種喚醒場景。比如用戶有用車需求了,可能通過手機端APP提前遠程開啟空調(diào)或座椅加熱等功能,那么這時就需要喚醒汽車上的很多控制器。首先TBOX需要被喚醒,然后TBOX醒來后會喚醒上高壓相關(guān)的控制器,再喚醒空調(diào),加熱器的控制器等。? ??
Source:遠程啟動功能可以開空調(diào)嗎?夏天遠程啟動車開空調(diào)傷車嗎
用戶發(fā)現(xiàn)汽車電量不充足了,那么會有充電需求,插槍充電,這時如果插上慢充槍,那么OBC會先被喚醒,識別出插槍行為及其慢充槍的連接狀態(tài),然后OBC喚醒BMS和其他相關(guān)的控制器進行充電。
Source: 【圖】熱門電動汽車新聞_新能源汽車行業(yè)資訊_電動邦 (diandong.com)
也就是說,通過對一個又一個整車功能和應(yīng)用場景的詳細分析,最終能夠匯總出整車所有的休眠喚醒場景需求,通常會用一個表格來管理,俗稱休眠喚醒表。休眠喚醒表一般有哪些內(nèi)容?根據(jù)上述所講的邏輯:
首先休眠喚醒需求,定義有哪些休眠場景或喚醒場景。針對每個喚醒場景,喚醒的條件是什么,針對每個休眠場景,休眠的條件又是什么。
其次是對于每個喚醒場景,哪些控制器需要參與?誰是主動喚醒節(jié)點,誰又是被動喚醒節(jié)點,每個控制器需要做什么事情。
然后呢,對于每個喚醒或休眠場景,有無喚醒或休眠的時間要求。如下圖示意(綠色代表主動喚醒節(jié)點):

注意休眠喚醒表是網(wǎng)絡(luò)管理最核心的內(nèi)容,正是有了這樣的需求,才有采用何種網(wǎng)絡(luò)管理方法,來實現(xiàn)預期的休眠喚醒行為。
05
網(wǎng)絡(luò)管理策略
5.1 AutoSAR NM 狀態(tài)機
當整車處于休眠狀態(tài),如果出現(xiàn)了喚醒場景,那么一定有來自控制器內(nèi)部的本地喚醒請求,然后才有喚醒網(wǎng)絡(luò)請求,體現(xiàn)在AutoSAR NM狀態(tài)機就是本地喚醒源使得IEB進入總線睡眠模式(BusSleep Mode),成為主動喚醒源,然后IEB就會從總線睡眠模式跳轉(zhuǎn)到網(wǎng)絡(luò)模式(Network Mode)的重復報文狀態(tài)(Repeat Message State)。? ??
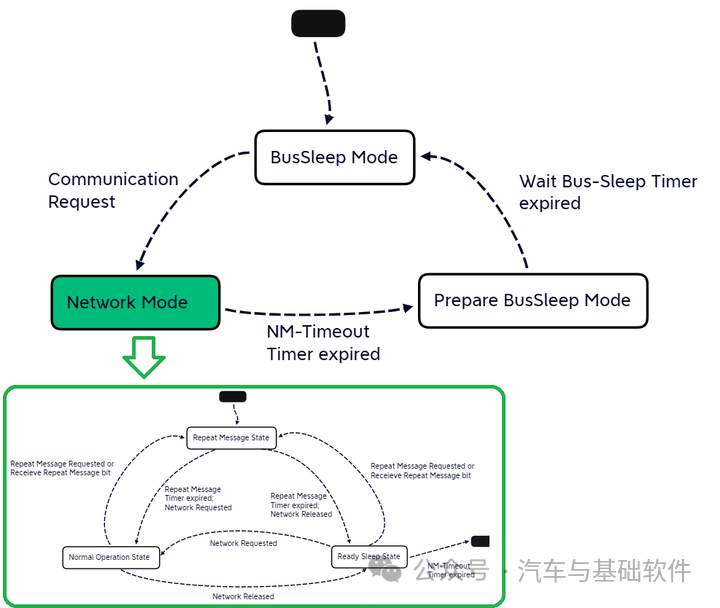
在重復報文狀態(tài),主動喚醒節(jié)點IEB會開始以快發(fā)形式發(fā)送網(wǎng)管報文,而且會連續(xù)發(fā)送一定的數(shù)量網(wǎng)管報文,比如以20ms的發(fā)送周期連續(xù)快發(fā)5幀網(wǎng)管報文。
而被動喚醒節(jié)點EPS和VCU接收到IEB的網(wǎng)管報文,同樣它們的狀態(tài)會跳轉(zhuǎn)到重復報文狀態(tài),也會周期性發(fā)送不同ID的網(wǎng)管報文,但不是快發(fā)形式,通常是500ms的發(fā)送周期,具體發(fā)多少幀取決具體需求。另外,對于被動喚醒節(jié)點EPS和VCU需要連續(xù)接收到IEB幾幀網(wǎng)管報文,可能是一幀,也可能是兩幀等,取決于具體需求。
另外在這個狀態(tài),對于主動喚醒節(jié)點IEB除了需要發(fā)送網(wǎng)管報文,還需要發(fā)送應(yīng)用報文,但第一幀是需要先發(fā)網(wǎng)管報文,再發(fā)應(yīng)用報文。
當IEB處于重復報文狀態(tài)一段時間后,就會跳轉(zhuǎn)到正常運行狀態(tài)(Normal Operation State),主動喚醒節(jié)點IEB將繼續(xù)周期性發(fā)送網(wǎng)管報文,比如500ms的發(fā)送周期,以此告訴其他節(jié)點自己在正常通信。
而EPS和VCU可能繼續(xù)周期性發(fā)送報文,也可能會停發(fā),取決于節(jié)點是否需要與與總線上其他節(jié)點進行信息交換。
當節(jié)點需要主動與總線上其他節(jié)點進行信息交換時,就通過發(fā)送網(wǎng)管報文來請求網(wǎng)絡(luò),并將其網(wǎng)絡(luò)狀態(tài)設(shè)置為“網(wǎng)絡(luò)請求”;
當節(jié)點不需要主動與總線上的其他節(jié)點進行交互時,就將網(wǎng)絡(luò)狀態(tài)設(shè)置為“網(wǎng)絡(luò)釋放”,節(jié)點在“網(wǎng)絡(luò)釋放”狀態(tài)下依然需要響應(yīng)總線上其他節(jié)點的網(wǎng)絡(luò)請求。
5.2 AutoSAR NM 網(wǎng)絡(luò)管理報文
網(wǎng)絡(luò)管理報文定義如下表:
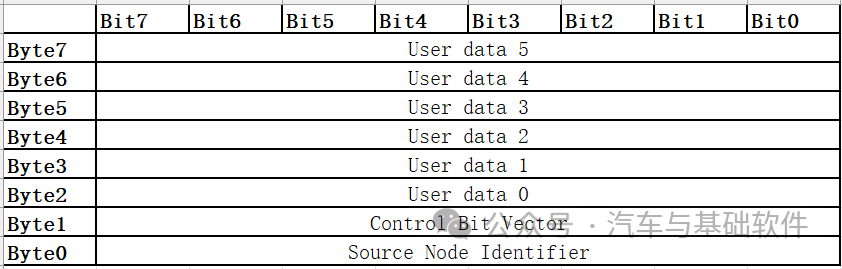
Byte0 用于發(fā)送源節(jié)點ID,每一個 ECU 都會被分配一個唯一的ID,來告知接收節(jié)點該網(wǎng)管報文是由哪個節(jié)點發(fā)送的。比如定義IEB的網(wǎng)管報文ID為0x410, 則節(jié)點ID為0x10;同樣地,EPS的網(wǎng)管報文ID為0x412, 則節(jié)點ID為0x12;VCU亦是如此邏輯。??

Byte1控制位向量,非常重要,這里著重介紹Bit0, 4, 6。
Bit 0 : 重復報文狀態(tài)請求位,用來表示有無請求重發(fā)報文狀態(tài),1則有,0則無;
Bit 4 : 主動喚醒位,用來表示是否為主動喚醒網(wǎng)絡(luò),1為主動喚醒,0為被動喚醒;
Bit 6 : 局部網(wǎng)絡(luò)信息位,用來表示網(wǎng)管報文包含PNC信息,如果網(wǎng)絡(luò)管理有使用到PN功能,那么該位會被置為1,否則為0;
其他位暫時預留。
06
休眠喚醒表與網(wǎng)絡(luò)管理
網(wǎng)絡(luò)管理是指車輛(下電,Power off)休眠之后,喚醒需要工作的控制器一起去實現(xiàn)相應(yīng)的整車功能。說到底就是需要結(jié)合好休眠喚醒表和網(wǎng)絡(luò)管理策略才有更完善的整車功能和行為,那他倆是如何相互結(jié)合的呢?
首先是休眠喚醒表與網(wǎng)絡(luò)管理報文相聯(lián)系,首先是網(wǎng)絡(luò)管理報文的Byte1(CBV),對應(yīng)上表中的某個場景滿足,綠框打勾的那個ECU就是主動喚醒節(jié)點,那么該ECU的網(wǎng)絡(luò)管理報文Byte1的Bit4就應(yīng)該置1;其次,與網(wǎng)絡(luò)管理報文Byte 2-7相關(guān),即User data。就結(jié)合本文IEB例子,某個喚醒場景需要實現(xiàn)底盤域控相關(guān)功能,需要喚醒IEB, EPS, EPB和VCU,其中IEB是主動喚醒節(jié)點,那么對于IEB的網(wǎng)絡(luò)管理報文的User data可以如下圖這樣的定義:
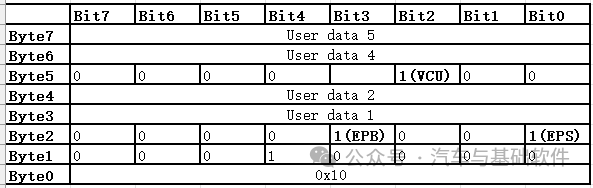
這樣通過休眠喚醒需求分析各個場景,最終可以提煉出每一個控制器作為主動喚醒節(jié)點,它需要去喚醒哪些控制器或網(wǎng)絡(luò)。因此可以確定每個控制器的網(wǎng)絡(luò)管理報文,不難理解,byte0和byte1。同時針對不同休眠或喚醒場景,網(wǎng)管報文的user data有所區(qū)別,如何做到場景與網(wǎng)管報文內(nèi)容一一映射,通常會定義另一幀報文,用來表明當前是哪個或哪幾個請求條件或釋放條件滿足。另外,采取何種網(wǎng)絡(luò)管理策略其實會影響休眠喚醒表的定義,比如采用PN,那么在休眠喚醒表中,是需要定義清楚PN cluster的。對于PN,有需要的話,可關(guān)注開心果 Need Car。
07
代碼的角度
?
?
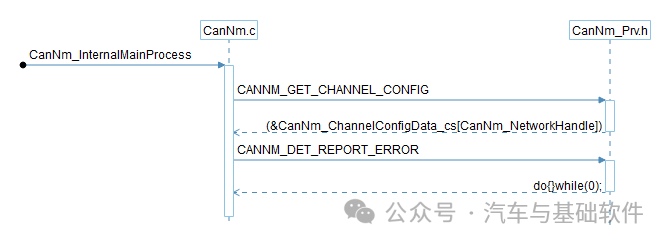
/*************************************************************************************************** Function name : CanNm_InternalMainProcess Syntax : void CanNm_InternalMainProcess( const NetworkHandleType CanNm_NetworkHandle ) Description : This is an internal main function of CANNM which does state machine processing for all channels. Parameter : CanNm_NetworkHandle - Identification of the CANNM-channel Return value : None ***************************************************************************************************/
?
?
?
?
/***************************************************************************************************
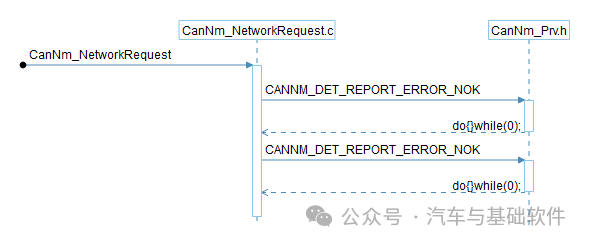
Function name : CanNm_NetworkRequest
Description : This is the AUTOSAR interface to request the network, since ECU needs to
communicate on the bus. This API shall be called by Nm.
Parameter : nmChannelHandle - Identification of the NM-channel
Return value : E_OK - No error
: E_NOT_OK - Requesting of network has failed
***************************************************************************************************/
?
?
?
?
?
/***************************************************************************************************
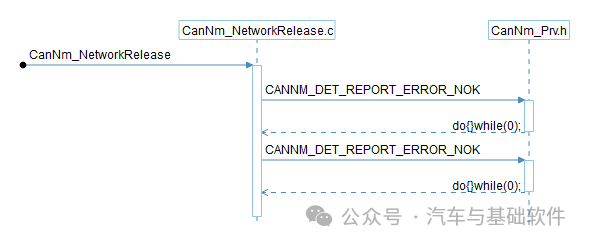
Function name : CanNm_NetworkRelease
Description : This is the AUTOSAR interface to release the network, since ECU doesn't have to
communicate on the bus. This API shall be called by Nm.
Parameter : nmChannelHandle - Identification of the NM-channel
Return value : E_OK - No error
: E_NOT_OK - Releasing of network has failed
***************************************************************************************************/
?
?
審核編輯:黃飛












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論