 電子發燒友App
電子發燒友App


Abstract: An inexperienced designer may think that power decoupling capacitors and grounds are magic mystical things that absorb every bad noise. They are not. This application note discusses proper capacitor selection. It explains the failure of capacitors to decouple power buses above their self-resonance point. To illustrate the forces and characteristics of capacitors on a ground plane, an analogy to electrons is used. Electron behavior is comically illustrated. Guiding currents toward the ground star point in ground planes is demonstrated by slotting the plane.
Several years ago a customer had system noise issues. Looking at a printed circuit board with a seasoned analog design engineer, we found a lack of power decoupling capacitors. The ground plane had more holes than Swiss cheese. The analog engineer said: "I thought so. The digital guy struck again." The digital engineer in this case was brilliant, but he was just unlearned in analog techniques. The digital designer had failed to understand analog concepts like impedance, transmission lines, standing waves, power decoupling, and why grounds are divided in analog and digital areas. Now we do not want to "bash digital," and without digital we would miss out on many, many cool products. Unfortunately some engineering educators place so much emphasis on digital that analog skills are not well developed.
This application note discusses proper capacitor selection and how that decision affects a well-grounded design. Guiding currents toward the ground star point in ground planes is demonstrated by slotting the plane. The discussion begins by emphasizing why this is necessary and how digital and analog circuits share a sensitivity to noise.
Figure 1. An input signal, noise, and the two added together.
Designers expect analog signals to be easily affected by noise. The lower waveform in Figure 1 is the direct result of adding noise to the signal, obviously a bad thing. However, digital is thought to be protected by thresholds. This thinking is erroneous, as we will see.
Figure 2. The top waveform is the input and noise. The bottom waveform has the noise added.
The thresholds in the digital portion of Figure 2 mean that the top waveform is really analog. How can this be? The region above the top threshold is the area where we call the signal a "one," and below the bottom threshold is the area that we call a "zero." What do we call the undermined area between the thresholds? That is analog. So the top waveform has noise present. Because the noise is below the threshold, digital thinking says that everything is OK. The bottom waveform does not cross a threshold, so it has to be OK!
It is time to see why this is digital mis-thinking.
Figure 3. Signal plus noise with the resulting time errors.
Figure 3 repeats parts of Figures 1 and 2, but adds vertical lines to illustrate how the analog noise changed the output timing. Clearly, more than just missing the amplitude (up and down) thresholds is necessary. Looking carefully at the transitions, we see that the negative transition "A" is early compared to its intended position. The positive transition "B" is very close, so we drew a single line. Negative transition "C" is early and positive transition "D" is late. The noise has been transformed from amplitude error to time-jitter positional errors. If the signal is sampled at the arrows, the information will be preserved. However, if signal frequency was higher, the time error would be larger as a percentage. Eventually the sample points will be compromised.
These illustrations show why we say that digital is analog. That is, both analog and digital require care to preserve the signal purity. At this point we can consider the techniques that safeguard our wanted signals.
AVX? and Kemet? are capacitor companies that specify parasitic components and provide free Spice tools. The application notes on both sites are also very informative. These Spice tools allow us to graph the actual performance of the capacitors. For example, a 0.1μF capacitor is used as decoupling in many circuits. The impedance is frequency dependent, as Table 1 illustrates.
Table 1. Frequency vs. Impedance of a Typical 0.1μF Capacitor
The Spice program allows us to evaluate and change several parameters to understand the circuit's function. The capacitor type can be ceramic or electrolytic. The size and working voltage are also variables.
In sensitive circuits we might see many decoupling components. Series inductors, resistors, and ferrite beads will form lowpass filters in conjunction with several capacitors. The capacitors are chosen to attenuate specific frequency ranges. It is not unusual to see four decoupling capacitors on a circuit. A large electrolytic serves as bulk current storage or low-frequency suppression; two ceramic capacitors are used to reduce interference in the 10MHz to 100MHz range. Finally, a small capacitor in the pico-Farad range is used to limit the higher radio frequencies.
Table 1 shows why the above four capacitors are necessary. Here a single 0.1μF ceramic capacitor is not effective in reducing interfering noise and spurious components below 33kHz or above 15MHz. Power line and switching power-supply ripple below 33kHz would not be attenuated sufficiently. A larger value electrolytic would be better. Noise between two and fifteen Megahertz are shunted to ground properly by the 0.1μF capacitor. Observe that at 15.8MHz, the 0.1μF capacitor becomes self-resonant. This means that the unavoidable parasitic inductor in series with the capacitor dominates. Above that frequency the capacitor looks like an inductor and this noise and garbage is not able to pass through the capacitor to ground.
It is incorrect to envision ground alone without the complementary power planes or buses. The current must make a complete circle to complete the circuit. However in this note, we will consider only the ground plane and ignore the power planes for simplicity.
It sounds uncharacteristic, even funny, but thinking like an electron does help in this discussion (Figure 4). Electrons by nature are lazy. They always take the easiest path. Water is also a useful analogy. When we observe floodwaters, we see the water spread across the flood plain if it is not constrained in some way. Current behaves the same way in a voltage or ground plane.
Figure 4. A caricature of an electron on a ground plane.
Figure 5a imagines the electrons playing on the ground plane. A close look reveals the "good guys" (the returning signal currents) in the upper left and "bad guys" at the lower right. Some electrons know their place and keep to it. Some are confused, and others can be bought (or co-opted) by the highest bidder or most persuasive force.
Figure 5a. Electrons abound without clear guidelines.
These electrons are free to move over the ground plane. As they travel toward the star point, lower left, these good and bad electron currents can, and do, mix together. (Yes, we know electrons flow the opposite way, but we want the analogy to be simple and to match the concept of water flow.) Noise and interference are the unwanted contamination of one current into another. As the noisy digital electrons flow past the analog circuits, they will induce noise into the linear analog circuit, and vice versa. It is thus quite clear that all circuits are degraded by bad power and grounds. Maxim parts are no exception.
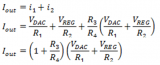
The MAX5400/MAX5401 digital potentiometers can have one side connected to the power bus or ground. Noise on the power or ground would be directly added to the signal. Voltage references like the MAX6133 have a line regulation specification, which indicates the amount of input voltage change that will be reflected in the output voltage. The MAX5532–MAX5535 family of 12-bit DACs has a power-supply rejection ratio (PSRR) of more than 20dB at 1kHz. This means that noise on the power bus will be reduced by a ratio of more than ten times. Nonetheless, having a part that reduces power-supply noise is no excuse for poor power design management on the ground. Good design demands good power.
One can now ask why the quiet analog signals do not harm the digital circuits? Oh, but they do damage the digital signals, just as the noise from one digital circuit interferes with other digital circuits. As we have discussed, analog and digital circuits are actually the same in this regard. The only difference is the presence of thresholds in digital. Really all noise in digital circuits is bad. Even if it is below the threshold, the noise contributes to errors and jitter. In analog every noise is bad, because there is no threshold to hide behind.
Figure 5b compounds the problem by adding a brushed motor with arcing brushes. These sparks are large enough in amplitude to cause errors in the digital circuits despite the thresholds.
Figure 5b. Adding an arcing, sparking brushed motor to the ground plane.
In both Figures 5a and 5b the ground areas are labeled as analog and digital. While one hopes that the signals stay in their regions, nothing keeps them separate. So in Figure 6a we have erected a fence.
Figure 6a. A fence is intended to corral the electrons (signals).
The fence is really a slot cut into the ground plane, shown here as a dotted line under the fence. The slot separates the ground plane into two sections only allowing a connection near the star ground point. Now the electrons are forced to remain only on their side of the fence.
Return now to the arcing, sparking motor in Figure 5b. Figure 6b addresses this challenge with two fences.
Figure 6b. Two fences isolate the circuits.
In the case of the brushed motor, the garbage created by the motor would be suppressed as close to the motor as possible. This is why it is common to find a capacitor soldered directly on the motor as well as diodes arranged to short out the back electromotive force (EMF). The EMF is the reverse voltage spike created by the motor's collapsing magnetic field. In a brushed motor that happens as the brushes bounce and as they commutate (switch) the motor current.
In Figure 6a the digital and analog circuits must be protected from each other as well as from the arcing and sparking motor. Two fences do the duty with connections again only near the ground star point.
Introduction
However surprising, some engineers really think that "ground" is a magic mystical thing that soaks up every bad thing like a black hole. We wish that were so. Designing a circuit would be far simpler.Several years ago a customer had system noise issues. Looking at a printed circuit board with a seasoned analog design engineer, we found a lack of power decoupling capacitors. The ground plane had more holes than Swiss cheese. The analog engineer said: "I thought so. The digital guy struck again." The digital engineer in this case was brilliant, but he was just unlearned in analog techniques. The digital designer had failed to understand analog concepts like impedance, transmission lines, standing waves, power decoupling, and why grounds are divided in analog and digital areas. Now we do not want to "bash digital," and without digital we would miss out on many, many cool products. Unfortunately some engineering educators place so much emphasis on digital that analog skills are not well developed.
This application note discusses proper capacitor selection and how that decision affects a well-grounded design. Guiding currents toward the ground star point in ground planes is demonstrated by slotting the plane. The discussion begins by emphasizing why this is necessary and how digital and analog circuits share a sensitivity to noise.
Why Digital Is Analog
Figure 1. An input signal, noise, and the two added together.
Designers expect analog signals to be easily affected by noise. The lower waveform in Figure 1 is the direct result of adding noise to the signal, obviously a bad thing. However, digital is thought to be protected by thresholds. This thinking is erroneous, as we will see.
Figure 2. The top waveform is the input and noise. The bottom waveform has the noise added.
The thresholds in the digital portion of Figure 2 mean that the top waveform is really analog. How can this be? The region above the top threshold is the area where we call the signal a "one," and below the bottom threshold is the area that we call a "zero." What do we call the undermined area between the thresholds? That is analog. So the top waveform has noise present. Because the noise is below the threshold, digital thinking says that everything is OK. The bottom waveform does not cross a threshold, so it has to be OK!
It is time to see why this is digital mis-thinking.
Figure 3. Signal plus noise with the resulting time errors.
Figure 3 repeats parts of Figures 1 and 2, but adds vertical lines to illustrate how the analog noise changed the output timing. Clearly, more than just missing the amplitude (up and down) thresholds is necessary. Looking carefully at the transitions, we see that the negative transition "A" is early compared to its intended position. The positive transition "B" is very close, so we drew a single line. Negative transition "C" is early and positive transition "D" is late. The noise has been transformed from amplitude error to time-jitter positional errors. If the signal is sampled at the arrows, the information will be preserved. However, if signal frequency was higher, the time error would be larger as a percentage. Eventually the sample points will be compromised.
These illustrations show why we say that digital is analog. That is, both analog and digital require care to preserve the signal purity. At this point we can consider the techniques that safeguard our wanted signals.
Selecting the Capacitor for the Application
One misconception is that capacitors take the bad noise of the power-supply lines and make it disappear into ground. Not true. Another notion is that capacitors are created equal. They are not. Poor capacitors do not help, and even high-quality capacitors are sensitive to frequency. All capacitors have unavoidable series resistance and inductance.AVX? and Kemet? are capacitor companies that specify parasitic components and provide free Spice tools. The application notes on both sites are also very informative. These Spice tools allow us to graph the actual performance of the capacitors. For example, a 0.1μF capacitor is used as decoupling in many circuits. The impedance is frequency dependent, as Table 1 illustrates.
Table 1. Frequency vs. Impedance of a Typical 0.1μF Capacitor
| Frequency (Hz) | Impedance (Ω) |
| 1k | 1.5k |
| 33k | 50 |
| 1.8M | 1 |
| 10M | 0.1 |
| 15.8M | 0.023, self-resonance point |
The Spice program allows us to evaluate and change several parameters to understand the circuit's function. The capacitor type can be ceramic or electrolytic. The size and working voltage are also variables.
In sensitive circuits we might see many decoupling components. Series inductors, resistors, and ferrite beads will form lowpass filters in conjunction with several capacitors. The capacitors are chosen to attenuate specific frequency ranges. It is not unusual to see four decoupling capacitors on a circuit. A large electrolytic serves as bulk current storage or low-frequency suppression; two ceramic capacitors are used to reduce interference in the 10MHz to 100MHz range. Finally, a small capacitor in the pico-Farad range is used to limit the higher radio frequencies.
Table 1 shows why the above four capacitors are necessary. Here a single 0.1μF ceramic capacitor is not effective in reducing interfering noise and spurious components below 33kHz or above 15MHz. Power line and switching power-supply ripple below 33kHz would not be attenuated sufficiently. A larger value electrolytic would be better. Noise between two and fifteen Megahertz are shunted to ground properly by the 0.1μF capacitor. Observe that at 15.8MHz, the 0.1μF capacitor becomes self-resonant. This means that the unavoidable parasitic inductor in series with the capacitor dominates. Above that frequency the capacitor looks like an inductor and this noise and garbage is not able to pass through the capacitor to ground.
The Importance of the Ground Plane
So far we have spoken of ground as if it is a low-impedance sink for everything, and that the interfering signals are single frequencies. Neither is true. Remember that the fast edges of switching power supplies and digital logic circuits create high-frequency harmonics which must be suppressed. Ground is also problematic; seldom is it anywhere near perfect.It is incorrect to envision ground alone without the complementary power planes or buses. The current must make a complete circle to complete the circuit. However in this note, we will consider only the ground plane and ignore the power planes for simplicity.
It sounds uncharacteristic, even funny, but thinking like an electron does help in this discussion (Figure 4). Electrons by nature are lazy. They always take the easiest path. Water is also a useful analogy. When we observe floodwaters, we see the water spread across the flood plain if it is not constrained in some way. Current behaves the same way in a voltage or ground plane.
Figure 4. A caricature of an electron on a ground plane.
Figure 5a imagines the electrons playing on the ground plane. A close look reveals the "good guys" (the returning signal currents) in the upper left and "bad guys" at the lower right. Some electrons know their place and keep to it. Some are confused, and others can be bought (or co-opted) by the highest bidder or most persuasive force.
Figure 5a. Electrons abound without clear guidelines.
These electrons are free to move over the ground plane. As they travel toward the star point, lower left, these good and bad electron currents can, and do, mix together. (Yes, we know electrons flow the opposite way, but we want the analogy to be simple and to match the concept of water flow.) Noise and interference are the unwanted contamination of one current into another. As the noisy digital electrons flow past the analog circuits, they will induce noise into the linear analog circuit, and vice versa. It is thus quite clear that all circuits are degraded by bad power and grounds. Maxim parts are no exception.
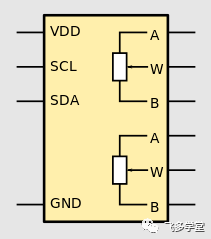
The MAX5400/MAX5401 digital potentiometers can have one side connected to the power bus or ground. Noise on the power or ground would be directly added to the signal. Voltage references like the MAX6133 have a line regulation specification, which indicates the amount of input voltage change that will be reflected in the output voltage. The MAX5532–MAX5535 family of 12-bit DACs has a power-supply rejection ratio (PSRR) of more than 20dB at 1kHz. This means that noise on the power bus will be reduced by a ratio of more than ten times. Nonetheless, having a part that reduces power-supply noise is no excuse for poor power design management on the ground. Good design demands good power.
One can now ask why the quiet analog signals do not harm the digital circuits? Oh, but they do damage the digital signals, just as the noise from one digital circuit interferes with other digital circuits. As we have discussed, analog and digital circuits are actually the same in this regard. The only difference is the presence of thresholds in digital. Really all noise in digital circuits is bad. Even if it is below the threshold, the noise contributes to errors and jitter. In analog every noise is bad, because there is no threshold to hide behind.
Figure 5b compounds the problem by adding a brushed motor with arcing brushes. These sparks are large enough in amplitude to cause errors in the digital circuits despite the thresholds.
Figure 5b. Adding an arcing, sparking brushed motor to the ground plane.
In both Figures 5a and 5b the ground areas are labeled as analog and digital. While one hopes that the signals stay in their regions, nothing keeps them separate. So in Figure 6a we have erected a fence.
Figure 6a. A fence is intended to corral the electrons (signals).
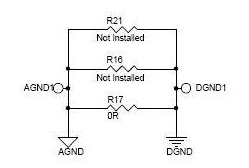
The fence is really a slot cut into the ground plane, shown here as a dotted line under the fence. The slot separates the ground plane into two sections only allowing a connection near the star ground point. Now the electrons are forced to remain only on their side of the fence.
Return now to the arcing, sparking motor in Figure 5b. Figure 6b addresses this challenge with two fences.
Figure 6b. Two fences isolate the circuits.
In the case of the brushed motor, the garbage created by the motor would be suppressed as close to the motor as possible. This is why it is common to find a capacitor soldered directly on the motor as well as diodes arranged to short out the back electromotive force (EMF). The EMF is the reverse voltage spike created by the motor's collapsing magnetic field. In a brushed motor that happens as the brushes bounce and as they commutate (switch) the motor current.
In Figure 6a the digital and analog circuits must be protected from each other as well as from the arcing and sparking motor. Two fences do the duty with connections again only near the ground star point.
Conclusion
Do ground star points fix all the grounding problems? No. Grounds are never perfect and each circuit board is different. A good ground star point is an excellent starting point for the board design. Then experience and thinking like an electron can provide the insight to help corral the electrons. Experience shows that it is best to start with a system plan and modify it to meet local circuit requirements. Quiet grounds, well-disciplined signals, and happy circuits do not just happen. They are designed.AVX is a registered trademark of AVX Corporation.
Kemet is a registered trademark of KRC Trade Corporation.










 工商網監
工商網監
評論