虛擬現實技術是一種可以創建和體驗虛擬世界的計算機仿真系統它利用計算機生成一種模擬環境是一種多源信息融合的交互式的三維動態視景和實體行為的系統仿真使用戶沉浸到該環境中。虛擬現實技術是仿真技術的一個重要
2016-03-10 16:56:31
有望接棒互聯網技術,成為“虛擬現實+工業”的全新格局。在《中國制造2025》重點領域技術路線圖重大政策文件中,虛擬現實被列為智能制造核心信息設備領域的關鍵技術之一,其基礎是智能制造各個環節信息獲取、實時
2018-09-27 17:37:28
; 虛擬現實產品大全200907期新增了包含3D立體顯示器、頭戴式顯示器、大型投影系統、位置追蹤器、VR軟件、3D輸入設備共五個大類的20款產品
2009-07-14 19:35:06
立體眼鏡、手持式立體雙目眼鏡、數據手套、3D輸入設備、投影系統、動作捕捉系統、位置追蹤器、眼動儀(眼鏡跟蹤儀)、力反饋設備、3D掃描器、3D打印機、3D立體顯卡、虛擬現實軟件等18個大類,產品數量高達
2010-01-12 17:41:12
`隨著科技科技水平的不斷發展,超聲波傳感器的應用領域越來越廣。在現實生活中我們不難發現,超聲波傳感器的身影無處不在。例如:臨床醫學的應用,果蔬解毒機對有害物質的分解,雜交水稻的發現,原子核或氫彈
2017-10-31 11:25:04
摘要:本文為實現智能小車的避障要求,設計了一套超聲波傳感器測距系統。首先介紹了超聲波傳感器工作原理和應用電路設計,并詳細說明了使用CD4051的簡單電路實現多路超聲波信號的循環發射與接收電路以及
2018-11-09 16:13:44
轉換成可用輸出信號的器件或裝置。由于超聲波指向性強,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量,如測距儀和物位測量儀等,都可以通過超聲波來實現。利用超聲波檢測往往比較迅速、方便、計算簡單、易于
2018-08-09 15:19:59
,尤其是在不透明的固體中,它可穿透幾十米的深度。超聲波碰到雜質或分界面會產生顯著反射形成反射成回波,碰到活動物體能產生多普勒效應。 超聲波傳感器是利用超聲波的特性研制而成的傳感器。在工業方面,超聲波
2016-12-16 18:17:08
展望 隨著科學技術的快速發展,超聲波將在傳感器中的應用越來越廣。在人類文明的歷次產業革命中,傳感技術一直扮演著先行官的重要角色,它是貫穿各個技術和應用領域的關鍵技術,在人們可以想象的所有領域中,它
2018-10-29 14:53:48
的頻率特性 超聲波傳感器實質上是一種可逆的換能器。一方面,它將電振蕩的能量轉變為機械振蕩,形成超聲波;另一方面,它又將接收的超聲波能量轉變為電振蕩。因此超聲波傳感器可分為發送器及接收器。典型的產品是在空氣中傳播的小型超聲波傳感器,如圖2所示。 圖2超聲波傳感器結構 a(發送部件 b)接收部件:
2018-12-04 13:49:30
超聲波測距主要應用于非接觸測量領域。目前測距專用超聲波系統由于成本高等的原因,在一些中小規模的應用領域中難以廣泛應用。隨著汽車智能化的發展,需要研制出能夠以更高的精度測距的新式傳感器,且成本低
2020-04-23 07:34:29
反射波測量物體的位置,所以測量對象的顏色或透明度對于超聲波傳感器的讀數沒有影響。 5.灰塵、污垢或高濕環境對于超聲波傳感器的測量沒有影響 其他傳感器在灰塵、污垢或高濕環境下能夠較好地工作,但在極端
2020-06-19 11:46:53
,但會帶來一些復雜的問題。如果有3~5V低壓驅動(功率更大)傳感器更好;3、靈敏度,最好是更高;可以看出,超聲波傳感器可以發射、來接收和分析人耳無法檢測到的聲音。在超聲波傳感器的檢測中可以用來實現超聲波
2023-04-21 09:09:05
應用的需要,但方程的簡單性顯示了相對簡單的操作超聲波傳感器。超聲波傳感器是如何工作的?從理論到現實,超聲波傳感器需要兩個部分,一個發射器和一個接收器。在最標準的配置中,它們盡可能地并排放置。當接收器靠近
2022-03-24 11:59:05
飲料瓶記數 在幾個關鍵節點對瓶子進行檢測與計數,確保了連續的物流監控。對每只瓶進入與離開灌裝系統都進行優化,并可靠地檢測缺失的瓶子。即使在強烈的蒸汽領域,也能精準的確保飲料瓶的檢測。 超聲波
2018-11-12 10:41:50
和最準確的判斷依據。大多數無人機中還有懸停和地面跟蹤模式,主要用于捕捉連續鏡頭和陸地導航,其中超聲波傳感器有助于將無人機保持在高于地面的恒定高度。本博文系列的第1部分討論了如何將超聲波傳感器與汽車
2022-11-11 08:12:22
的主要和最準確的判斷依據。大多數無人機中還有懸停和地面跟蹤模式,主要用于捕捉連續鏡頭和陸地導航,其中超聲波傳感器有助于將無人機保持在高于地面的恒定高度。超聲波原理超聲波的定義是使用高于人類聽力上限頻率
2020-02-21 09:46:17
,170Vpp~1600Vpp的輸出電壓范圍,40mA~500mA的電流輸出能力,是超聲波檢測的理想選擇。功率放大器在超聲檢測中的應用:系統硬件由示波器、任意波形發生器、ATA-2000系列高壓放大器以及
2017-10-11 10:41:42
單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波單片機超聲波
2016-04-14 23:51:47
多年以來,超聲波感應器在乘用車上應用廣泛如超聲波停車輔助可幫助車輛在低速停車時檢測周圍物體。此外,踢腳開啟后備箱和入侵檢測報警則是超聲波傳感器的兩個新興應用。如圖1所示。本文將為您詳細解釋這三種應用為何以及如何使用超聲波感應器。圖1:用于乘用車中的超聲波感應器
2019-07-24 07:59:53
多年以來,超聲波感應器在乘用車上應用廣泛如超聲波停車輔助可幫助車輛在低速停車時檢測周圍物體。此外,踢腳開啟后備箱和入侵檢測報警則是超聲波傳感器的兩個新興應用。
2020-05-19 06:06:35
是無人機的主要和最準確的判斷依據。大多數無人機中還有懸停和地面跟蹤模式,主要用于捕捉連續鏡頭和陸地導航,其中超聲波傳感器有助于將無人機保持在高于地面的恒定高度。本博文系列的第1部分討論了如何將超聲波
2019-03-18 06:45:07
超聲波成像是一種應用廣泛的醫療成像方法。傳統超聲波成像系統使用2~15MHz的頻率,精度水平為毫米,已廣泛應用于監控胎兒,以及診斷內臟疾病等。在過去的20多年里,傳統臺式超聲波系統主導了醫療超聲波
2019-07-09 08:07:02
由于超聲波換能器的技術改進,使它們更便宜、更精確、尺寸更小,而且隨處可以買到,因此超聲波技術在流量測量中得到了廣泛的應用。先進的集成模擬電路使得超聲波換能器波形的實時捕獲和處理更加容易,從而可以獲得
2020-08-07 07:33:45
超聲波檢測系統的電源設計超聲波檢測技術在工業生產和日常測量中得到了廣泛的應用。例如汽車倒車環節、建筑施工工地及工業現場的位置監控等,其還可用于液位、井深、管道長度測量等場合。[hide][/hide]
2009-12-11 10:38:53
,其中D為超聲波傳感器與測量對象之間的距離,C為介質中聲波的傳播速度(C = 331.4+t273 / 1m / s,t是攝氏溫度),T是超聲波發射回波的時間間隔。理論上,超聲波在正常空氣中傳播速度隨著
2018-11-20 21:18:33
簡單、易于實現實時控制,并且在測量精度方面能達到工業實用的指標要求,因此為了使移動機器人能夠自動躲避障礙物行走,就必須裝備測距系統,以使其及時獲取距障礙物的位置信息(距離和方向)。因此超聲波測距在
2016-04-18 20:56:27
超聲波測距系統設計由于超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現。利用超聲波檢測往往比較迅速、方便、計算簡單
2008-10-15 15:25:58
超聲波測距儀的設計及程序超聲波測距電路設計由于超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現。利用超聲波檢測往往比較
2008-10-15 15:23:13
超聲波測距傳感器在窨井中的作用以及優勢如何使用超聲波測距傳感器監控窨井水位超聲波測距傳感器在智慧水務中的位置隨著現代社會城市的不斷進步,窨井在城市中的作用也越來越重要,但窨井的增加也會伴隨著一系列
2021-03-24 18:36:56
1.超聲波測距原理超聲波是利用反射的原理測量距離的,被測距離一端為超聲波傳感器,另一端必須有能反射超聲波的物體。測量距離時,將超聲波傳感器對準反射物發射超聲波,并開始計時,超聲波在空氣中傳播
2021-07-21 07:01:00
分機械方式和電氣方式兩類,它實際上是一種換能器,在發射端它把電能或機械能轉換成聲能,接收端則反之。本次設計超聲波傳感器采用電氣方式中的壓電式超聲波換能器,它是利用壓電晶體的諧振來工作的。它有兩個壓電晶片
2012-04-25 11:32:07
藍橋杯單片機必備知識-----(9)超聲波測距超聲波測距原理:超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即
2021-07-19 09:08:54
超聲波測距電路設計由于超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠,因而超聲波經常用于距離的測量,如測距儀和物位測量儀等都可以通過超聲波來實現。利用超聲波檢測往往比較迅速、方便、計算簡單
2009-12-15 16:10:31
1、測距原理超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發射后遇到障礙物反射回來的時間,根據發射和接收的時間差計算出發射點到障礙物的實際距離。超聲波發射器向某一方向發射超聲波,在
2021-12-01 06:56:04
一、超聲波測距的基本原理超聲波測距原理是在超聲波發射裝置發出超聲波,接收器接收超聲波,根據接收器接到超聲波時的時間差以及超聲波在介質中的傳播速度,從而計算出物體距離模塊的距離,與雷達測距原理相似
2021-08-06 09:35:51
,不僅度儲油罐的測量有很重要的意義,在其他液位測量系統中,也處于越來越重要的地位。河南思科測控技術有限公司在傳統的壓電可逆換能器為核心的超聲波檢測技術中,融合了先進的集成電路技術和計算機技術。這不
2017-12-01 15:45:43
生產的順利進行,防止危險事故的發生。 計為Uson系列超聲波液位計在水位監測中的應用 計為Uson系列超聲波液位計就是采用超聲波脈沖回波法實現液位測量的,具體就是超聲波液位計的換能器(探頭)發出
2020-06-19 14:12:08
目標及其狀態,如潛艇的位置等。此時人們向水中發出一系列不同頻率的超聲波,然后記錄與處理反射回聲,從回聲的特征我們便可以估計出探測物的距離、形態及其動態改變。醫學上最早利用超聲波是在1942年,奧地利醫生
2020-11-09 08:55:26
超聲波液位計的局限性 距離測量、密閉容器內液位檢測、障礙物檢測、透明物體檢測、汽車防撞系統、醫療影像技術等等領域,都是超聲波傳感器大施拳腳的場景。而作為非接觸測量的超聲波液位計,由于具有安裝
2020-06-19 11:49:30
。 溶劑系統:多為超聲波汽相除油脂清洗機,常配備廢液連續回收裝置。超聲波汽相清除油脂過程是由溶劑蒸發槽和超聲浸洗槽組成的集成式多槽系統完成的。在熱的溶劑蒸汽和超聲激蕩共同作用下,油、脂、蠟以及其他溶于
2009-06-18 08:55:02
超聲波焊接原理:通過超聲波發生器將高頻電能轉換成高等頻率的機械運動,隨后機械運動通過一套可以改變振幅的調幅器裝置傳遞到焊頭。焊頭將接收到的振動能量傳遞到待焊接工件的接合部,在該區域,振動能量被通過
2018-07-23 10:08:23
超聲波電機是基于壓電電磁的超聲波頻率的震動實現驅動的新型電機。超聲波是什么?人耳所能聽到的聲音頻率范圍大約在20赫茲~20千赫茲之間,而超過20千赫茲以上,人耳無法辨識的頻率便稱為超聲波。那么究竟
2020-11-16 11:03:44
給人類帶來的災難,尤其是海面變化不定的風速問題因此風速傳感器成為了他們的首選產品。超聲波風速傳感器是利用超聲波時差法來實現風速的測量。聲音在空氣中的傳播速度,會和風向上的氣流速度疊加。若超聲波的傳播
2019-09-19 00:52:08
設備。在設置傳感器時,需注意將風速風向傳感器放置到準確的朝向,同時進行加固處理,方能精準檢測風速和風向。超聲波風速風向傳感器的原理與應用在地下礦山通風系統中,風速風向傳感器用于監測井下風速風向的實時變化
2020-04-06 10:34:11
做的更小、更輕、更薄。2、反應速度快,控制特性好:超聲波電機靠摩擦力驅動,移動體的質量較輕,慣性小,響應速度快,起動和停止時間為毫秒量級。因此它可以實現高精度速度控制和位置控制。3、低速大轉矩:在
2021-01-21 10:43:02
的ATA-2000系列高壓放大器提供了DC-2MHz的帶寬,170Vpp~1600Vpp的輸出電壓范圍,40mA~500mA的電流輸出能力,是超聲波檢測的理想選擇。功率放大器在超聲檢測中的應用:系統硬件由
2016-08-04 14:01:17
模塊HC-SR043.STM32F103C8T6最小系統板實現功能:選用兩個超聲波實現實時測距,并測得的距離在串口1顯示。思路:使用定時器2實現輸入捕獲測距。超聲波模塊引腳STM32最小系統板引腳設置模式 VCC+5V GNDGN
2021-12-06 07:06:51
Knowles Acoustics推出用于探測/接收空氣中超聲波的組件——超聲波聲學傳感器(UAS)。該超聲波傳感器采用最新的MEMS(微電子機械系統)技術,可適應多種環境要求,是一種高性能機械
2018-11-19 16:42:35
本實用新型涉及計算機顯示器技術領域,具體為一種基于虛擬現實用計算機顯示器。背景技術:虛擬現實技術,又稱靈境技術,是20世紀發展起來的一項全新的實用技術,虛擬現實技術囊括計算機、電子信息、仿真技術于
2021-09-02 08:37:14
,通常在23千赫茲到40千赫茲之間,超聲波這個詞就是從這里來的。超聲波傳感器是如何工作的利用空氣中聲音的室溫速度,343 m/s,我們可以很快地計算出距離,同時要記住噪音是在目標的兩個方向
2022-04-11 10:24:54
超聲波測距是一種典型的非接觸測量方式。超聲波在氣體、液體及固體中以不同速度傳播,定向性好、能量集中、傳輸過程中衰減較小、反射能力較強。且超聲波測距系統結構簡單、電路易實現、成本低、速度快,所以在工業
2022-01-06 08:04:11
什么是超聲波電源?超聲波電源是什么工作原理?超聲波電源有哪些分類?
2021-03-16 11:14:16
Chirp SonicTrack超聲波控制器跟蹤解決方案有哪些主要特點和優點?Chirp SonicTrack超聲波控制器跟蹤解決方案有哪些應用?
2021-07-30 06:04:19
可靠,免除很多售后的麻煩,帶來更多的附加值,從而進一步提高系統效率,節省成本,實現持續的過程優化。廣州一諾智能科技在工業自動化領域發展多年,對超聲波傳感器有很豐富的應用經驗,可為客戶提供進口超聲波
2021-07-06 18:49:14
;nbsp; 《虛擬現實產品大全》200906期在05期的基礎上,又新增了包含大型投影系統、頭戴式顯示器、3D立體顯示器、位置追蹤器四個大類的11款產品。截止到目前,[BR]搜維爾產品庫已涉及3D立體顯示器
2009-06-09 21:41:58
作者:Arun T. Vemuri,德州儀器 (TI) 基爾比實驗室系統工程師 引言在超聲波測距車載應用中,例如:超聲波泊車輔助 (UPA) 和盲點探測 (BSD) 等,系統發射的超聲波被周圍物體
2012-12-30 14:51:28
是移動機器人研究的一個基本問題。障礙物與機器人之間距離的獲得是研究安全避障的前提,超聲波傳感器以其信息處理簡單、價格低廉、硬件容易實現等優點,被廣泛用作測距傳感器。本超聲波測距系統選用了SensComp
2009-12-15 10:20:19
的信息而實現的。視覺、紅外、激光、超聲波等傳感器都在移動機器人中得到實際應用。超聲波傳感器以其性價比高、硬件實現簡單等優點,在移動機器人感知系統中得到了廣泛的應用。但是超聲波傳感器也存在一定的局限性,主要
2018-11-02 16:04:48
實現的。視覺、紅外、激光、超聲波等傳感器都在移動機器人中得到實際應用。超聲波傳感器以其性價比高、硬件實現簡單等優點,在移動機器人感知系統中得到了廣泛的應用。但是超聲波傳感器也存在一定的局限性,主要
2012-01-19 13:45:49
系統測量質量。TDC-GP22的脈沖發生器在小管徑的流量測量中可直接驅動超聲波換能器,無需另外增加驅動芯片,簡化了設計并降低了成本;高精度的時間測量,簡潔的外部電路、集成的內部信號處理算法,超低的整體
2014-08-25 16:12:35
技術。它是依據計算機視頻技術為基礎,將計算機圖像處理。計算機心理學。人工智能。人機交互技術。傳感器技術。網絡以及顯示處理一系列信息技術分支的最新成果集中在一起。在虛擬現實環境中,人可以與虛擬世界中的場景
2017-01-06 18:29:36
~40 kHz,可以驅動在該頻率范圍內的不同應用類型換能器,具有寬頻域的廣泛適用性。1 超聲波電源系統構成超聲波電源由整流電路、逆變電路、匹配電路、反饋電路和主控制電路組成。系統結構框圖如圖1所示。主控制器
2018-10-17 16:46:18
中視角位置的前后平移,從而實現在虛擬場景中參觀的功能,手柄外觀示意如圖2 所示。圖2 手柄外觀示意圖。 PDF全文下載:基于MEMS傳感器的虛擬現實參觀系統.rar參考文獻:[1
2018-11-05 14:59:58
ARM內核芯片STM32F103ZET6的32位嵌入式微處理器與帶有溫度補償的US-100超聲波測距模塊實現聲波測距。STM32的串口資源相當豐富,能提供5路串口,通過微處理器的串口實現實時顯示
2018-09-05 16:13:22
超聲波測距是一種典型的非接觸測量方式。超聲波在氣體、液體及固體中以不同速度傳播,定向性好、能量集中、傳輸過程中衰減較小、反射能力較強。且超聲波測距系統結構簡單、電路易實現、成本低、速度快,所以在工業
2022-01-06 06:56:42
發生器內有一個共振板和兩個壓電晶片,當它的外加脈沖信號頻率等于壓電晶片的固有頻率時,壓電晶片會產生共振,并帶動共振板一起振動,這樣就產生了超聲波[2]。在電路中, 本文采用紅外結合超聲波的方式來實現
2011-11-09 20:59:09
風速是氣象測量的一個重要要素,利用超聲波進行風速測量現如今得到廣泛的應用,技術已經很成熟。當超聲波在空氣中傳播時,受到風速的影響,順風和逆風情況下存在一個時間差,基于這個原理制成的時差法超聲波風速
2023-09-26 07:08:07
基于單片機與虛擬儀器的超聲波探測系統的設計
2020-05-20 10:20:27
文章目錄1 簡介2 主要器件3 實現效果4 設計原理4.1 聲波雷達原理5 部分實現代碼6 最后1 簡介Hi,大家好,這里是丹成學長,今天向大家介紹一個學長做的單片機項目基于單片機的超聲波測距系統
2021-11-10 08:53:35
很大(如墻壁),超聲波傳感器可以用來準確測距,但若將其應用在小車防撞系統中,由于障礙物呈柱狀,而超聲波發射頭有一定的散射角(左右),因此即使障礙物不在小車正前方,超聲波仍能檢測到斜前方回波,這就給智能
2018-11-02 10:47:01
超聲波測距中,通常因溫度和時間檢測的誤差,使得測距的精度降低,為此,可以在小車上增加溫度補償功能。本次制作完成的,只是三個超聲波測距延時,沒有安裝到小車上,后續將陸續實現更多的功能。。。拓展功能包括:
2020-02-26 10:44:11
如何實現超聲波水表流量校準的?超聲波水表流量校準方法有哪些?
2021-05-14 06:29:10
如何實現基于STM32的超聲波測距?
2021-12-15 07:35:56
應用為何以及如何使用超聲波感應器。圖1:用于乘用車中的超聲波感應器超聲波停車輔助系統超聲波停車輔助也被稱為停車輔助系統、停車引導系統和倒車輔助。這些系統可實現從簡單地檢測周圍物體并通過聲音警示駕駛員,到
2022-11-11 07:01:05
超聲波測距原理是什么?如何使用超聲波模塊實現測距功能?
2021-10-27 06:35:35
測量距離的方法有很多種,短距離的可以用米尺,遠距離的有激光測距等,超聲波測距適用于高精度的中長距離測量。因為超聲波在標準空氣中的傳播速度為331.45米/秒,由單片機負責計時,系統的測量精度理論上
2022-01-10 08:28:59
copy,就很煩),但還好最后完成了要求。在這過程中也學到了一點東西,就來記錄一下。我選擇的是Arduino UNO R3 ,ULTRASONIC SENSOR超聲波模塊,一個虛擬串口監視器。Arduino源代碼如下:int pingPin = 7;int echoPin = 6;long t;floa
2022-01-17 07:03:41
從封裝結構來看超聲波圖片從超聲波原理來看超聲波圖片
2021-03-10 08:09:27
超聲波測距原理是什么?怎么實現基于stm32最小系統的超聲波測距的設計?
2021-11-08 08:44:26
近年來,超聲波在工業中的應用不斷涌現,比如超聲波探傷,超聲波清洗等等。伴隨著超聲研究的熱門,如何有效的產生符合要求的超聲波功率源也變的迫切起來,其性能特點直接影響著超聲的研究工作?
2019-08-23 06:41:19
,再繪制總體實驗原理圖并進行軟件仿真,制作實驗電路板,選擇合適位置安裝超聲波傳感器,完成硬件的設計;軟件設計方面,使用編程語言編寫超聲波流量計實驗軟件,并與虛擬器結合;最后,軟硬件聯調并測試該實驗裝置
2013-10-25 14:47:24
) A 掃描來源于英文單詞 Amplitude ,即幅值的意思,也即顯示器的橫坐標是超聲波在被檢測材料中的傳播時間或者傳播距離,縱坐標是超聲波反射波的幅值。基于 A 掃的缺陷判定方式,當在一個鋼工件中
2020-07-10 15:11:09
添加的物體模型和材質能夠更真實的模擬該場景在各種情況下各種階段的狀況。無疑,老子云上所達到的身臨其境效果,遠遠超過了拼圖式全景視頻實現的效果,做到真正可交互的虛擬現實,我有點期待,它會給虛擬現實市場帶來什么樣的沖擊?
2017-05-24 13:47:07
介紹了虛擬現實和跟蹤系統的概念、用途以及磁阻傳感器的特點闡述了利用磁阻傳感器開發虛擬現實三自由度和六自由度跟蹤系統的基本原理及其應用。關鍵詞: 磁阻傳感器; 虛
2009-06-27 09:19:23 16
16 闡述了虛擬現實的概念及基本特性論述了虛擬現實系統的組成該系統主要由虛擬環境產生器、新型人機接口硬件及虛擬現實開發系統組成;分析了虛擬現實的主要技術———動態環
2009-07-10 08:07:2839 本文研制了一種基于虛擬儀器的超聲波檢測系統。采用TI 公司的TMS320C5402DSP處理器,設計了超聲波檢測系統的硬件電路,提出了超聲檢測信號的處理算法,并編寫其軟件;采用NI
2009-12-31 14:17:4828 脈沖超聲波的產生及其特點
用于產生和接收超聲波的材料一
2008-11-24 14:53:36 7280
7280 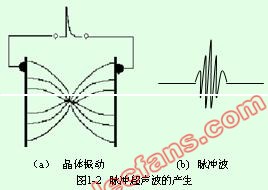
超聲波測距實驗一、 實驗目的1、 了解超聲波的產生及其在介質中的傳播特性2、 了解超聲波傳感器基本結構及其工作原理3、 了解超聲波傳感器測距系
2009-03-07 11:18:476848 
超聲波技術及其應用
超聲技術是一門以物理、電子、機械及材料學為基礎的通用技術之一。超聲技術是通過超聲波產生、傳播及接收的物理過程而
2009-10-30 14:18:241044 基于A型超聲波傳感器的血壓連續測量系統_李洪陽
2017-03-19 19:07:172 虛擬現實的引擎是給這個虛擬現實技術提供強有力支持的一種解決方案,而實現的軟件系統,就是所說的虛擬現實引擎。
2018-01-02 16:36:4414419 模塊HC-SR043.STM32F103C8T6最小系統板實現功能:選用兩個超聲波實現實時測距,并測得的距離在串口1顯示。思路:使用定時器2實現輸入捕獲測距。超聲波模塊引腳 STM32最小系統板引腳 設置模式 VCC +5V GND GN
2021-11-23 18:07:0614 桌面虛擬現實系統
桌面虛擬現實系統是一套基于普通PC平臺的小型虛擬現實系統。利用中低端圖形工作站及立體顯示器 產生虛擬場景,參與者使用位置跟蹤器、數據手套、力反饋器、三維鼠標、或其它手控輸入設備實現虛擬現實技術的重要技術特征。
2023-04-14 14:42:374507
 電子發燒友App
電子發燒友App


 (1)
(1) (2)
(2)







 工商網監
工商網監
評論