 電子發燒友App
電子發燒友App


本文將介紹一種支持GPRS的GPS系統,并且對其中所涉及到的硬件、軟件設計方案給出了詳細的描述。通過該模型,可以比較好的實現GPS定位信息數據遠程傳輸。
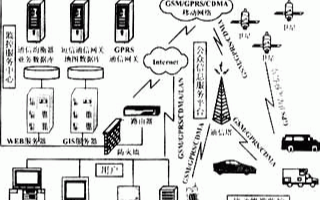
1 系統模型
圖1是本方案的系統模型。從GPS終端采集來的定位數據,經過GPRS網絡透明地傳輸到遠程GPS服務器,遠程GPS服務器通過對GPS數據的解碼便可以獲得定位信息。其詳細的流程可以概括如下:

① 首先,GPS終端發出包括有APN號碼的GPRS登錄請求,登陸到 GPRS網絡;
② 位于移動的SGSN根據登陸請求中的APN,找到登記的Radius服務器,并將用戶認證信息送至Radius服務器;
③ Radius認證服務器根據所傳遞過來的認證信息,確認是否是合法用戶發來的請求,如果是合法用戶,則根據配置為其分配一個IP地址;
④ Radius服務器向GGSN發送攜帶用戶地址的確認信息;
⑤ GPS終端得到了IP地址,就可以根據配置(作為服務器端或者客戶端)與GPS服務器建立起TCP連接;
⑥ 連接建立后,GPS終端采集到的定位信息數據就會通過建立的TCP數據連接透明地傳輸到GPS服務器;
⑦ 當GPS服務器有控制命令或其它數據要向下發送時,可以通過TCP連接傳送到GPS終端;
⑧ GPS終端根據配置可以作為服務器端或者客戶端建立與用戶管理服務器的數據連接,用戶管理服務器通過該連接對GPS終端進行監控、管理以及遠程更新系統內核程序。
2 GPS終端的設計
2.1 硬件設計
GPS終端的電路框圖如圖2所示,GPS終端的核心是一塊負責TCP/IP數據傳輸的網絡處理器:IP2022芯片。IP2022是UbiCom公司的高性能網絡處理器,具有100MIPS的處理能力,并專門針對網絡應用進行了優化。在IP2022芯片中集成了兩個全雙工的串化器/解串器(Ser/Des)硬件單元,能直接與各種常用接口相連。這種功能使其能夠實現片內10Base-T以太網、USB以及其它各種快速串行協議。由于擁有Ser/Des硬件單元,IP2022也便于從一種協議轉換到另一種協議,因此比較適合于實現GPS終端。
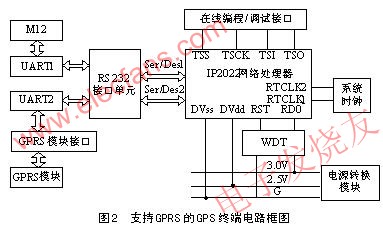
IP2022的軟件模塊包括USB、UART、I2C、SPI以及一個完整的TCP/IP堆棧,它能夠在執行應用程序的同時,提供高速計算、靈活的I/O控制和高效的數據處理功能。
在本系統中,主要應用了IP2022的兩個Ser/Des硬件單元以及其TCP/IP協議棧。兩個全雙工的Ser/Des硬件單元經過串口轉換電路(核心為MAX232)轉換成為兩個標準的RS232接口,通過這兩個RS232接口便于與GPS模塊以及GPRS模塊的通信。
系統時鐘模塊為硬件系統提供工作所需要的時鐘脈沖,這部分比較簡單,但是需要注意兩個方面。一是晶振的選擇,雖然IP2022也支持無源晶振,但是在實際應用中發現還是有源晶振與IP2022的兼容性好一些,所以在可能的情況下還是選擇有源晶振比較好。二是晶振頻率的選擇,由于串口通信的波特率是對晶振頻率分頻而成,如果晶振頻率選擇不當,在串口通信時會出現亂碼。經試驗和計算所得,4.9152MHz的晶振可以很好的支持多種常用波特率。
程序的寫入和調試是通過在線編程接口實現的,IP2022支持在線編程和調試,該部分主要把IP2022的編程接口引出,加以適當的隔離保護,并通過SPI和并口的轉換電路與調試機的并口相連接。
在本系統中,內部電壓有兩種,一種是接口設備所需要的3V,另一種是IP2022所需要的2.5V。這兩種電壓是經過電源轉換模塊轉換而成。由于GPRS模塊在數據發送的時候瞬間電流很大,電源轉換模塊也提供了足夠的功率和必要的保護。
GPRS數據模塊實現GPRS傳輸的功能,相當于普通的Modem,市面上比較流行的有Motorola的G18在與GPRS數據傳輸模塊通信時,沒有采用直接操縱GPRS數據傳輸模塊接口,而是通過RS232連接,極大的降低了對GPRS數據傳輸模塊的依賴性,用戶可以根據需要,來選定GPRS數據模塊。
GPS接收器采用了Motorola公司的M12,M12通過串口與RS232接口單元相連接。
2.2 軟件設計
在GPS終端軟件設計方面,為了便于以后擴展,采用了嚴格的分層結構,具體的軟件結構如圖3所示。
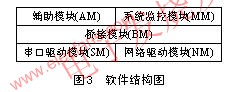
2.2.1 串口驅動模塊
利用串口驅動模塊來完成對串口的操作,向上層提供對串口參數配置的功能,并在有數據收到或者發送完畢的時候通過IndicateReceive、IndicateSend回調函數向上層報告,上層軟件可以調用Send、Receive來進行收發。
2.2.2 網絡驅動模塊
在硬件中的GPRS模塊只是提供了一種硬件信道,與服務器之間的數據連接必須通過軟件完成。在通信時,軟件首先通過GPRS模塊特有的命令(一般為AT+CGMD)與GPRS網絡連接,再通過PPP協議建立數據鏈路,最后就可以通過TCP/IP協議與遠程的服務器通信了。這一部分與網絡操作的功能都放在網絡驅動模塊中加以實現。與串口驅動模塊類似,網絡驅動模塊也提供了數據傳輸的一些服務。
2.2.3 橋接模塊
由于串口是一個慢速連接,主機與串口的通信有時甚至是單字節操作,如果對于每一個這樣小的通信都單獨通過一個TCP包發送的話,譬如說一個字節的數據,這將產生一些41字節的分組:20字節的IP頭,20字節的TCP頭以及1字節的數據。如果在高速網絡上(例如局域網),這一些小分組通常不會引起麻煩,但是如果在GPRS這樣的網絡上(平均往返時間高達數百ms),則會增加擁塞出現的可能性,并將會使網絡的效率極其低。在通常的TCP/IP實現中,一般采用Nagle算法來解決這個問題。但是在Ubicom的協議棧中沒有這個功能,因此,必須自己實現這個算法。考慮到對下層硬件結構的無依賴性,筆者將其放在橋接模塊中實現,而不是放在網絡驅動模塊中實現。在算法實現中,當有串口數據到來時,對于小分組,并不立即就將其發出,而是等待一段時間(200s左右),如果在這段時間中再沒有小數據到來,那么將其發出,否則將數據進行累計后發出。當然有些系統要求立即發出,那么也可以通過配置取消這種功能。經這樣實現后,效率有了很大的提高,具體的效果可以參考后面的實驗數據。
2.2.4 輔助模塊
在上面一些模塊的介紹中可以看到,其中有一些關鍵性的數據必須支持用戶自己配置,例如串口通信速度、停止位、網絡驅動模塊中GPRS所要連接的APN、賬戶、密碼、工作模式(是作為服務器運行還是客戶端運行)、靜態IP還是動態IP等。這一部分數據由配置模塊存儲在外部存儲器里,每次系統啟動的時候再由配置模塊載入。在輔助模塊中還包括一個重要的子模塊:遠程管理模塊,它實現對GPS終端的遠程管理,包括遠程跟蹤和遠程更新程序。系統的運行情況通過統計模塊進行統計,然后可以通過遠程管理模塊進行上報。
2.2.5 系統監控模塊
對于放在遠程的一個無人看管的系統來說,最重要的一點就是容錯能力,必須能夠在任何錯誤的情況下自動恢復到正常運行狀態,這一部分就是通過系統監控模塊實現的。在GPS終端中,經常出現的異常包括有TCP連接中斷和網絡連接中斷,這兩種錯誤是有區別的,解決的方法也不一樣。TCP連接中斷指的是TCP連接進入異常狀態,不能在該連接上進行數據的收發工作。這種錯誤產生的原因是GPRS網絡有時會進入偽死狀態,而導致雖然還在網絡上,但是數據的收發工作無法進行。通過在每個連接上設置一個收發超時計時器可以發現這種錯誤。當有數據傳輸時即復位計數器,如果計數器超時,則表明TCP連接中斷,此時應該根據工作模式而采取不同的處理。如果是工作在客戶端模式,需要再次與服務器連接,如果工作在服務器模式,則只需要簡單的斷開連接即可。
對于網絡連接中斷的情況探測起來比較困難,一般是通過監測長時間沒有數據通信來判斷。如果一旦發生此類錯誤,則需要重新進行網絡的連接工作。
由于軟件難免會有一些未曾發覺的錯誤,在發生此類錯誤的時候則由硬件看門電路復位系統,并且在下次軟件啟動時將此類錯誤發生過的信息遠程傳送到服務器。
3 服務器端軟件的設計
GPS服務器程序可以采用兩種方式與遠程的GPS終端建立連接,一種是采用TCP方式,另外一種是采用串口通信方式。在采用串口通信方式時,需要編制一個虛擬串口驅動程序,將一個TCP連接模擬成為一個串口,這樣服務器就可以像操縱M12一樣對遠程的GPS終端進行操作了。
GPS服務器和遠程GPS終端之間的通信協議采用了原始的M12通信命令,核心模塊在GPS服務器和M12之間進行了數據透明轉發的作用。M12支持有兩種通信數據格式: 一是Motorola二進制數據指令格式,在采用Motorola二進制格式時,通信速率可以保證在9600bps;另一種是NMEA-0183格式,其通信速率只有4800bps,同時在初始化GPS時還需要加入由Motorola二進制轉化為NMEA-0183的指令。因此建議使用Motorola二進制數據格式。
在此設計當中,關鍵的環節在于兩個方面,一是連接的建立,二是M12的初始化。GPS終端返回的定位信息數據格式如下:
@@Eamdyyhmsffffaaaaoooohhhhmmmmvvhhddtntimsd imsdimsdimsdimsdimsdimsdimsdsC。
時間信息:m月,d日,yy年, h小時,m分,s秒。
位置信息:aaaa緯度,oooo經度,hhhh橢球高度。
在所有信息終止的前的一個字節為校驗和,是所有信息字節的“異或”。
收到數據后,只要對數據進行解碼,就可以獲得定位信息以及時間。
4 服務器端的考慮
在GPRS聯網中,必須注意的一個概念是APN。在登陸GPRS時,采用的APN不同,GPS終端和服務器之間所能采用的方式也有所不同。
如果采用公網APN(cmnet),那么服務器端只要有一固定公網IP即可,此時Radius服務器由移動公司提供,GPS終端上網后的IP也是由移動公司的Radius服務器隨機分配的。GPS終端與服務器必須經過NAT(Network Address Translation,網絡地址變換)后才能通信,而從我們數據服務器看過去的GPS終端的IP地址也不是它的真正地址。因此,GPS終端與數據服務器之間的連接只能由GPS終端發起,換言之,即GPS終端只能工作在客戶狀態。在采用公網時雖然可以節省開支,但需要考慮安全性問題,因為這時候是與Internet直接連通的,并且客戶之間也不可以直接訪問。
與公網APN相對應的一種方式是采用私有APN,即用戶向移動申請一個APN號。在采用這種方式時,所有登陸這個APN的用戶可以通過IP地址互相訪問,因此在數據量比較小的時候甚至可以采用一個也使用GPRS終端的用戶做服務器。Radius服務器的設置比較靈活,可以采用移動公司的Radius服務器,也可以自建一套Radius服務器。自建Radius服務器的最大好處就是GGSN會將驗證信息發送給我們,我們可以根據號碼或者其它信息為其分配一個靜態IP地址,非常適合GPS終端作為服務器運行。
Radius服務器可以采用一些商用的服務器,但從實踐中看,自己編寫一套Radius服務器可能更加適合GPRS。
5 結 論
對系統進行了全面的測試,在傳輸效率上面,本系統表現的非常良好,連接上網絡的時間僅需要3s左右。在使用Class 12的GPRS模塊時,傳輸速率可以達到38kbps的上傳速度以及44kbps的下傳速度。對于一般的數據采集設備能夠保證數據的及時傳輸,在發生GPRS網絡短暫失效時,可以在網絡恢復后的10s內重新在線,基本上保證了無間斷傳輸,因此可以滿足GPS用戶的需要。











 工商網監
工商網監
評論