 電子發(fā)燒友App
電子發(fā)燒友App


?
當(dāng)前GPS作為全球性衛(wèi)星導(dǎo)航系統(tǒng)的應(yīng)用范圍越來(lái)越廣,而其在弱信號(hào)環(huán)境下的接收技術(shù)研究,受到緊急救援和未來(lái)軍事需求的刺激已經(jīng)成為研究熱點(diǎn)。其中,高靈敏度接收技術(shù)在GPS接收機(jī)中的應(yīng)用,由于不受環(huán)境和條件的限制尤為受到重視。在高靈敏度GPS接收機(jī)中,由于捕獲算法處在基帶處理的最前端,因此高效的微弱GPS信號(hào)捕獲算法是提高高靈敏度GPS接收機(jī)性能的關(guān)鍵。通常的弱信號(hào)環(huán)境比室外信號(hào)強(qiáng)度低約20~30 dB,載噪比小于28 dB-Hz,故被視為弱信號(hào),高靈敏度GPS接收機(jī)主要通過(guò)信號(hào)處理算法來(lái)獲得高的信號(hào)處理增益。本文分析了主要信號(hào)累積技術(shù)的優(yōu)缺點(diǎn),討論了弱信號(hào)環(huán)境下GPS信號(hào)檢測(cè)值的概率統(tǒng)計(jì)分布特性,在此基礎(chǔ)上結(jié)合快速相干累積算法,提出了利用幀同步信息的微弱GPS信號(hào)捕獲算法,并分析了其可行性。通過(guò)仿真驗(yàn)證和實(shí)際數(shù)據(jù)測(cè)試,證明算法可行有效。
1 GPS信號(hào)模型及特性
實(shí)際到達(dá)接收機(jī)的中頻數(shù)字信號(hào)中包含著L1及L2載波的完整信息,在弱信號(hào)的C/A碼捕獲研究中,忽略P碼及L2載波進(jìn)行分析,可采用下式:

?
式中:
為信號(hào)幅值;D(·)為數(shù)據(jù)位;τ為數(shù)據(jù)位延遲;C(·)為PRN碼;η為碼速率多普勒變化率;τ0為輸入信號(hào)的碼相位延遲;ωm為載波標(biāo)稱(chēng)頻率;ωd為載波多普勒頻移;φ0為載波初始相位;n(·)為等效輸入的帶限白噪聲。
按照基本的捕獲流程,接收的數(shù)字中頻信號(hào)經(jīng)過(guò)載波剝離和C/A碼進(jìn)行相關(guān),再進(jìn)行相干累積和非相干累積后輸出一個(gè)幅值V,當(dāng)幅值V超過(guò)預(yù)定的捕獲門(mén)限時(shí)判決捕獲成功。其中,信號(hào)經(jīng)過(guò)相干累積后I,Q支路可表示為:

?
式中:a為信號(hào)的幅值;τp為本地搜索C/A碼與接收C/A碼之間的相位差;fe為接收載波與本地載波之間的頻率差;φe為兩載波之間的相位差;Tcoh為相干累積時(shí)長(zhǎng);nI和nQ分別代表I支路和Q支路上的噪聲,其功率σn2為:
?
即噪聲功率與相干累積時(shí)長(zhǎng)成反比,從一個(gè)方面揭示了弱信號(hào)捕獲算法中,相干累積能提高信噪比的原因。
理論上捕獲門(mén)限可以根據(jù)虛警概率和信號(hào)檢測(cè)幅值概率的分布關(guān)系,計(jì)算出理論上的捕獲門(mén)限,但由于實(shí)際當(dāng)中信號(hào)檢測(cè)幅值的概率分布關(guān)系相當(dāng)復(fù)雜,因而實(shí)際當(dāng)中對(duì)捕獲門(mén)限很少根據(jù)理論進(jìn)行設(shè)置,而是通過(guò)相對(duì)捕獲門(mén)限來(lái)完成捕獲判決。
根據(jù)捕獲幅值的統(tǒng)計(jì)特性可知,在弱GPS信號(hào)環(huán)境下根據(jù)單次的捕獲結(jié)果進(jìn)行門(mén)限判決,產(chǎn)生誤判的概率非常大。如果對(duì)多次捕獲的結(jié)果進(jìn)行統(tǒng)計(jì)比較,進(jìn)行相對(duì)捕獲判決就可以克服這種不足,從而提高捕獲算法性能。
2 信號(hào)累積算法性能分析
在微弱GPS信號(hào)捕獲算法中,信號(hào)累積技術(shù)是提高處理增益的關(guān)鍵。當(dāng)前提高信號(hào)處理增益的基本方法為信號(hào)累積技術(shù),可分為三類(lèi):相干累積、非相干累積和差分累積。其中,信號(hào)經(jīng)相干累積處理獲取的增益效果最佳,但應(yīng)用受到導(dǎo)航數(shù)據(jù)比特翻轉(zhuǎn)的限制,如累積過(guò)程中遇到數(shù)據(jù)比特翻轉(zhuǎn)性能會(huì)有所下降;非相干累積和差分累積的提出就是為了克服和減少這種影響,但需付出不同程度的信噪比損失作為代價(jià),并且原始信號(hào)越差,它們的信噪比損失越大,因此只能與相干累積結(jié)合使用。目前微弱GPS信號(hào)的捕獲算法均是以信號(hào)累積理論為基礎(chǔ),如半比特捕獲算法和全比特捕獲算法,通過(guò)估計(jì)數(shù)據(jù)比特跳變來(lái)進(jìn)行長(zhǎng)相干累積的捕獲算法,以及在對(duì)三種數(shù)據(jù)累積技術(shù)分析比較的基礎(chǔ)上提出相干累積與差分檢測(cè)相結(jié)合的方法等,這些算法的改進(jìn)均是為了提高對(duì)微弱GPS信號(hào)的捕獲性能,使高靈敏度GPS接收機(jī)實(shí)用化。因而,在此盡量延長(zhǎng)相干累積的時(shí)間,從而最大限度地提高信號(hào)的處理增益,捕獲更加微弱的GPS信號(hào)。
2.1 新的快速相干累積算法
前面提到的相干累積算法,通常是將每1 ms的相關(guān)運(yùn)算結(jié)果進(jìn)行相干疊加運(yùn)算,即進(jìn)行多少次相干累積,便進(jìn)行多少次相關(guān)運(yùn)算。即便采用FFT算法,相關(guān)運(yùn)算的運(yùn)算量依然很大。在微弱GPS信號(hào)的捕獲過(guò)程中,通常需要進(jìn)行長(zhǎng)時(shí)間的相干累積運(yùn)算,以提高信號(hào)處理增益,因此這里采用文獻(xiàn)提到的方法,先將信號(hào)進(jìn)行疊加,再進(jìn)行相關(guān)運(yùn)算的方法來(lái)減少運(yùn)算量。基本原理如下:
已知相關(guān)運(yùn)算的卷積形式表達(dá)為:
?
式中:Yn(k)為第n次的相關(guān)值;yn(k)為第n毫秒接收到的原始中頻數(shù)據(jù);x(k)為本地C/A碼與本地載波的組合,則N次相干累積的表示式為:
?
式中:z(k)為N段信號(hào)的累積。可見(jiàn),經(jīng)過(guò)變換后進(jìn)行N次相干累積只需做1次相關(guān)運(yùn)算,運(yùn)算量減少近N倍。
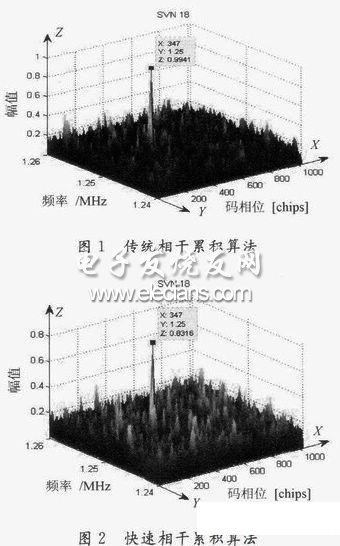
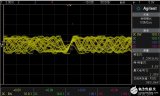
為了對(duì)比快速相干累積的性能,使用信噪比為-31 dB的GPS仿真數(shù)據(jù),進(jìn)行10 ms的相干累積后,對(duì)GPS信號(hào)進(jìn)行捕獲。對(duì)于同一段仿真數(shù)據(jù),分別使用傳統(tǒng)相干累積算法和快速相干累積算法各運(yùn)行10次,傳統(tǒng)相干累積算法平均耗時(shí)2.01 s,快速相干累積平均耗時(shí)0.11 s,由此可見(jiàn),快速相干累積算法的捕獲速度提高顯著。捕獲結(jié)果分別如圖1和圖2所示。
?
為了便于比較快速相干累積和傳統(tǒng)相干累積算法的差異,圖1和圖2中的幅值坐標(biāo),均以傳統(tǒng)相干累積的捕獲峰值進(jìn)行歸一化處理。
在上述仿真條件不變的情況下,多次運(yùn)行仿真程序兩種方法均可穩(wěn)定地捕獲到信號(hào),但將兩組捕獲峰值進(jìn)行對(duì)比,傳統(tǒng)相干累積30次捕獲結(jié)果的相關(guān)峰值的均值為12.507×10-9;快速相干累積算法的捕獲峰值為10.742×10-9。相對(duì)于傳統(tǒng)相干累積算法,快速相干累積的相關(guān)峰均值下降了14.11%。可見(jiàn),快速相干累積算法的總體性能優(yōu)越,但在提高運(yùn)算速度的同時(shí),捕獲結(jié)果中的相關(guān)峰值略有降低,這是該算法為獲得高效率而付出的微小代價(jià)。
3 弱信號(hào)捕獲方案設(shè)計(jì)
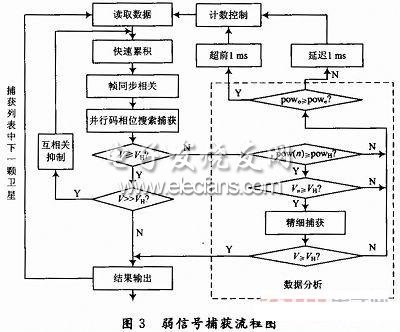
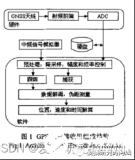
通過(guò)對(duì)導(dǎo)航電文的格式和編碼規(guī)則分析,可確定每6 s出現(xiàn)一次的幀同步信息始終為10001011,因而利用已知的具有良好自相關(guān)特性的幀同步信息進(jìn)行弱信號(hào)捕獲是一個(gè)理想選擇。總體方案設(shè)計(jì)如圖3所示。
?
算法中使用了相對(duì)捕獲的概念,即通過(guò)對(duì)多次相關(guān)峰值的比較,作為粗捕獲結(jié)果,以此來(lái)估計(jì)是否存在衛(wèi)星信號(hào),再根據(jù)粗捕獲結(jié)果進(jìn)行小范圍內(nèi)的精細(xì)捕獲。同時(shí)利用文獻(xiàn)中提出的數(shù)據(jù)比特翻轉(zhuǎn)估計(jì)方法,再與幀同步相關(guān)運(yùn)算相結(jié)合,從而使比特翻轉(zhuǎn)估計(jì)精度大為提高,可實(shí)現(xiàn)更長(zhǎng)時(shí)間的相干累積,獲得較高的信號(hào)處理增益。算法突出的特點(diǎn)是捕獲過(guò)程中對(duì)不同強(qiáng)度信號(hào)采用不同的捕獲流程,強(qiáng)信號(hào)快速直接捕獲,對(duì)相對(duì)弱的信號(hào)通過(guò)較長(zhǎng)時(shí)間的累積來(lái)獲得信號(hào)。
捕獲方案基本流程如下:
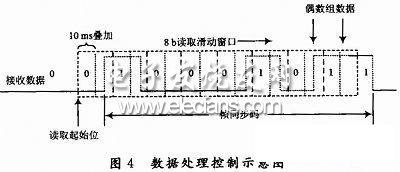
(1)數(shù)據(jù)讀取。將中頻采樣數(shù)據(jù)按固定的8比特160 ms的長(zhǎng)度,逐次讀取,每次延遲1 ms的數(shù)據(jù)位。
(2)快速累積。對(duì)數(shù)據(jù)進(jìn)行交替半比特相干累積,并將結(jié)果分為奇偶兩組。
(3)相關(guān)運(yùn)算。將第(2)步所得兩組數(shù)據(jù)分別與本地幀同步碼進(jìn)行滑動(dòng)相關(guān)運(yùn)算。
(4)碼并行捕獲。與幀同步碼相關(guān)后的數(shù)據(jù)進(jìn)行碼并行捕獲運(yùn)算,嘗試尋找接收數(shù)據(jù)的C/A碼初相與載波頻點(diǎn)。
(5)數(shù)據(jù)分析。估計(jì)數(shù)據(jù)比特的翻轉(zhuǎn)位置,判斷幀同步碼是否出現(xiàn)。
(6)捕獲判決。如果當(dāng)前數(shù)據(jù)組的捕獲峰值超過(guò)捕獲門(mén)限,則輸出對(duì)當(dāng)前衛(wèi)星的捕獲結(jié)果;否則等待幀同步信息出現(xiàn),再比較捕獲峰值是否超過(guò)捕獲門(mén)限。如捕獲時(shí)間超過(guò)6 s,則結(jié)束對(duì)當(dāng)前衛(wèi)星的搜索。
(7)延遲控制。默認(rèn)情況數(shù)據(jù)讀取起始位置比上次延遲20 ms。當(dāng)數(shù)據(jù)分析估計(jì)出數(shù)據(jù)比特翻轉(zhuǎn)位置時(shí),則根據(jù)估計(jì)結(jié)果,對(duì)讀取數(shù)據(jù)的位置在默認(rèn)值上進(jìn)行整數(shù)個(gè)毫秒的調(diào)整。
(8)互相關(guān)抑制。當(dāng)某顆衛(wèi)星的檢測(cè)信號(hào)峰值遠(yuǎn)遠(yuǎn)大于捕獲門(mén)限時(shí),則認(rèn)為接收信號(hào)中存在著強(qiáng)衛(wèi)星信號(hào),為了減少該信號(hào)在捕獲過(guò)程中對(duì)其他弱GPS信號(hào)的影響,在成功捕獲該強(qiáng)GPS信號(hào)后,對(duì)其進(jìn)行互相關(guān)抑制。
精細(xì)捕獲是為了驗(yàn)證相對(duì)捕獲的準(zhǔn)確性,進(jìn)一步提高捕獲的精度。由于,當(dāng)信號(hào)中出現(xiàn)幀同步碼時(shí)才會(huì)有較高的相關(guān)能量值和峰值,因而進(jìn)行的精細(xì)捕獲所用數(shù)據(jù)是包含幀同步信息的一段,并且正確估計(jì)了比特翻轉(zhuǎn)的位置,所以精細(xì)捕獲就可以通過(guò)進(jìn)一步延長(zhǎng)相干累積時(shí)間來(lái)捕獲較弱的GPS信號(hào)。
4 方案具體實(shí)現(xiàn)
4.1 可見(jiàn)衛(wèi)星預(yù)測(cè)
GPS接收機(jī)冷啟動(dòng)捕獲衛(wèi)星信號(hào)時(shí),搜索衛(wèi)星是一個(gè)耗時(shí)的過(guò)程。弱信號(hào)環(huán)境下的衛(wèi)星搜索將會(huì)耗費(fèi)更多的時(shí)間,因而通過(guò)對(duì)衛(wèi)星可見(jiàn)性的預(yù)測(cè)來(lái)減少搜索衛(wèi)星的數(shù)目,對(duì)高靈敏度GPS接收機(jī)具有較大實(shí)際意義。
由于高靈敏度GPS的應(yīng)用多數(shù)是低速運(yùn)動(dòng)的環(huán)境,加上當(dāng)前GPS衛(wèi)星軌道的穩(wěn)定性大為提高。因而假定接收機(jī)在某個(gè)大的地域之內(nèi),根據(jù)已知的衛(wèi)星歷書(shū)(最長(zhǎng)有效期為半年)得到GPS衛(wèi)星的仰角,從而估計(jì)出可見(jiàn)衛(wèi)星的顆數(shù)。根據(jù)仰角可得到最佳衛(wèi)星搜索的次序,從而提高衛(wèi)星搜索的效率。經(jīng)過(guò)對(duì)衛(wèi)星可見(jiàn)性的預(yù)測(cè),僅需搜索十幾顆衛(wèi)星,比默認(rèn)的盲搜索衛(wèi)星的數(shù)目大為減少。
4.2 相干累積時(shí)長(zhǎng)限制
由前面的式(2)和式(3)可知,接收載波與復(fù)制載波間的頻率差fe會(huì)在檢測(cè)量V中引入值為|sinc(feTcoh)|的損耗,這會(huì)增大信號(hào)檢測(cè)的漏警率和降低信號(hào)捕獲的靈敏度。通常將相干積分的頻率誤差損耗限制在3dB之內(nèi),此時(shí)對(duì)應(yīng)|sinc0.443 |=0.7071,即|feTcoh|<0.443。在僅考慮多普勒頻移造成的頻率差時(shí):
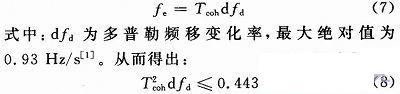
?
由此計(jì)算出相干累積時(shí)長(zhǎng)Tcoh不應(yīng)超過(guò)0.69s。
4.3 數(shù)據(jù)分析
本捕獲方案中,通過(guò)對(duì)多段數(shù)據(jù)直接進(jìn)行疊加,再利用幀同步信息的自相關(guān)特性來(lái)提高信號(hào)的處理增益,但未知數(shù)據(jù)翻轉(zhuǎn)依然限制著相干累積的性能。根據(jù)文獻(xiàn)提出的比特翻轉(zhuǎn)估計(jì)方法,通過(guò)比較相關(guān)運(yùn)算的幅值能量大小來(lái)估計(jì)數(shù)據(jù)比特翻轉(zhuǎn)位置。
?
由圖4可知,當(dāng)對(duì)一組8 b數(shù)據(jù)進(jìn)行交替半比特相干累積后,數(shù)據(jù)比特翻轉(zhuǎn)要么在奇數(shù)組數(shù)據(jù)中,要么在偶數(shù)組數(shù)據(jù)中。對(duì)于存在數(shù)據(jù)比特翻轉(zhuǎn)的數(shù)據(jù)組,其相關(guān)運(yùn)算的幅值能量應(yīng)當(dāng)小于另外一組。
?
式中:pow(n)為第n組數(shù)據(jù)的相干累積后幅值能量。
由于幀同步信息具有自相關(guān)特性,當(dāng)處理的一組數(shù)據(jù)中含有幀同步碼時(shí),捕獲運(yùn)算的相關(guān)幅值能量pow(n)應(yīng)明顯高于其他組。同時(shí)由于對(duì)接收信號(hào)進(jìn)行了幀同步碼和C/A碼兩級(jí)相關(guān)運(yùn)算,捕獲結(jié)果的峰值也應(yīng)當(dāng)高于其他數(shù)據(jù)組。因此根據(jù)pow(n)和捕獲運(yùn)算峰值的大小,可以在完成捕獲的同時(shí)估計(jì)出幀同步信息的位置。
4.4 互相關(guān)抑制
目前主要的四類(lèi)互相關(guān)抑制技術(shù)有:多門(mén)限檢測(cè)法、多峰檢測(cè)法、扣除法、子空間投影法。對(duì)互相關(guān)的處理思想,要么是判斷相關(guān)結(jié)果主峰是否是由互相關(guān)引起的,從而決定對(duì)結(jié)果的取舍;要么通過(guò)一定的方法計(jì)算出強(qiáng)信號(hào)的互相關(guān)結(jié)果,進(jìn)而從信號(hào)中消除互相關(guān)干擾的影響。文獻(xiàn)提出的互相關(guān)減去法,都是基于對(duì)強(qiáng)信號(hào)相關(guān)值進(jìn)行估計(jì)后,再將其從接收信號(hào)相關(guān)值中減去的方式來(lái)消除互相關(guān)的影響,需要計(jì)算強(qiáng)信號(hào)的多個(gè)相關(guān)值,計(jì)算量很大。扣除法則是在載波和偽碼剝離前,基帶數(shù)字信號(hào)處理模塊先在接收信號(hào)中扣除強(qiáng)信號(hào)成分。該方法的思路和實(shí)現(xiàn)比較簡(jiǎn)單,可以利用后級(jí)跟蹤環(huán)路的信息進(jìn)行實(shí)現(xiàn)。
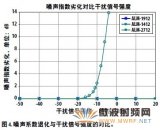
總體而言,在GPS弱信號(hào)捕獲中,互相關(guān)干擾的抑制存在著較大的難度。由于本捕獲方案中使用了多級(jí)的捕獲門(mén)限設(shè)置,因而具有一定的抗互相關(guān)干擾的能力。所以在這里采用扣除法的思想,通過(guò)重構(gòu)強(qiáng)信號(hào)的方法將接收信號(hào)中的強(qiáng)信號(hào)成分消除。互相關(guān)干擾消去法的基本原理如圖5所示。

?
5 性能仿真與實(shí)測(cè)結(jié)果
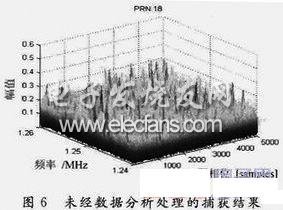
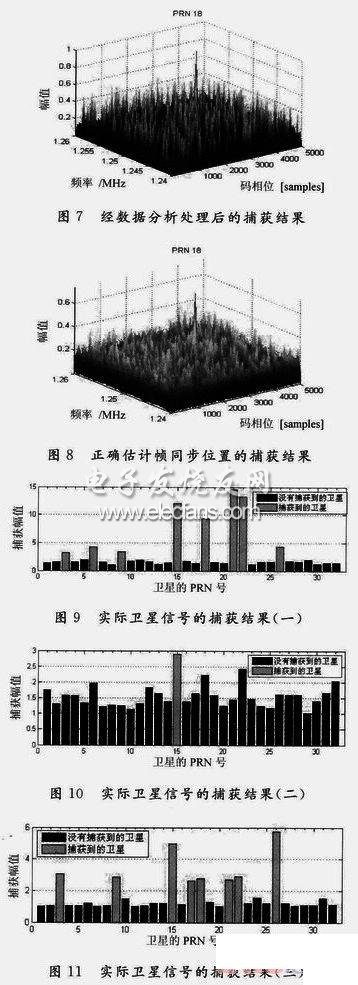
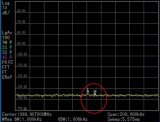
在Matlab環(huán)境下進(jìn)行仿真分析,可以準(zhǔn)確地控制仿真數(shù)據(jù)的信噪比,從而準(zhǔn)確地評(píng)估算法的性能。GPS數(shù)字中頻的產(chǎn)生,噪聲帶寬Bn按C/A碼信號(hào)頻譜主峰帶寬2.046 MHz選取,從而在信號(hào)中加入功率為-140 dBW的高斯白噪聲,通過(guò)控制信號(hào)幅值產(chǎn)生任意信噪比的仿真信號(hào)。仿真信號(hào)的中頻頻率為1.25 MHz,采樣頻率為5MHz,捕獲程序從仿真數(shù)據(jù)任意位置開(kāi)始讀取數(shù)據(jù)。當(dāng)信噪比SNR=-42dB時(shí),本方案對(duì)6s的仿真數(shù)據(jù)進(jìn)行捕獲。可看出,當(dāng)捕獲運(yùn)算中沒(méi)有進(jìn)行數(shù)據(jù)分析和結(jié)果處理時(shí),無(wú)法找到明顯的峰值,如圖6所示;通過(guò)數(shù)據(jù)比特翻轉(zhuǎn)位置估計(jì)和數(shù)據(jù)分析,捕獲結(jié)果可以獲得明顯的相關(guān)峰值,如圖7所示。
?
信噪比為-43 dB時(shí),當(dāng)仿真中正確估計(jì)了數(shù)據(jù)比特翻轉(zhuǎn)和幀同步信息位置時(shí),捕獲峰值達(dá)到設(shè)定的捕獲門(mén)限,結(jié)果如圖8所示。
?
采用NewStar210 GPS中頻信號(hào)采樣器,將普通環(huán)境下接收到的GPS衛(wèi)星信號(hào)進(jìn)行中頻采樣后,分別用普通捕獲算法和本算法進(jìn)行捕獲。采用普通捕獲算法對(duì)采集到的GPS信號(hào)進(jìn)行捕獲的結(jié)果如圖9所示。當(dāng)在采集信號(hào)中加入22 dBW的高斯噪聲后,普通捕獲算法的捕獲結(jié)果如圖10所示,而采用本文捕獲方案的捕獲結(jié)果如圖11所示。
通過(guò)對(duì)比可以看出,在信號(hào)中加了仿真噪聲后,在信噪比很低的情況下,使用普通捕獲算法的接收機(jī)無(wú)法正常工作。而本文提出的弱信號(hào)捕獲算法,可以穩(wěn)定地捕獲到低信噪比下的衛(wèi)星信號(hào),使接收機(jī)在弱信號(hào)下的定位解算成為可能。采用本算法后多捕獲到的較弱衛(wèi)星信號(hào),可顯著提高GPS接收機(jī)靈敏度,同時(shí)也可有效提高定位精度。
6 結(jié)語(yǔ)
通過(guò)理論分析、仿真驗(yàn)證和實(shí)際測(cè)試,證明本捕獲方案優(yōu)于同類(lèi)方法,具有速度快和靈敏度高的特點(diǎn),可穩(wěn)定地捕獲信噪比為-43 dB的微弱GPS信號(hào)。在低信噪比下,方案中的數(shù)據(jù)分析方法可估計(jì)出數(shù)據(jù)比特翻轉(zhuǎn)和幀同步信息出現(xiàn)的位置,從而通過(guò)對(duì)數(shù)據(jù)讀取位置的調(diào)整來(lái)提高信號(hào)處理增益。仿真結(jié)果顯示,該捕獲方案的捕獲靈敏度在經(jīng)數(shù)據(jù)分析和讀取控制處理后,比未進(jìn)行這些處理時(shí)提高2~3dB。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論