 電子發燒友App
電子發燒友App


隨著無線通信的快速發展,由此引起的關于室內定位的無線網絡和RFID技術的結合也越來越受關注。人們對物品、人員位置的需求也越來越強烈。在室外的定位,如熟知的GPS定位已經做到讓很多人都滿意的程度,但是一旦進入到室內,由于建筑物的阻擋以及多徑效應,GPS在室內的定位的效果大打折扣,所以室內定位的研究成為定位后續的研究重點。
傳統的標簽定位的距離有缺陷,限制了其廣泛的應用。所以提出了RFID技術和無線網絡結合,擴大其定位的范圍。
無線Wi-Fi在一個免費的2.4GHz頻段,有很高的數據傳輸速度。所以選擇基于Wi-Fi網絡通信的定位標簽。
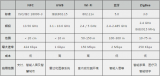
Wi-Fi網絡有如下優勢:Wi-Fi的工作頻段在2.4GHz,而且處于免費頻段,對用戶來說不需要額外的費用;Wi-Fi的傳輸距離可以達到100m,可以覆蓋整個大樓;Wi-Fi的傳輸速率很高,可達到54 Mbps.影響定位的精確度不僅僅是關于定位技術的選擇,同時定位算法的選擇也會影響其定位精度。
常見的室內定位的算法主要分為兩類:基于測距技術的定位算法和距離無關的算法。基于測距技術的算法一般是通過節點之間的距離或者角度來計算出未知節點的位置,實際運用中常見的有:基于接收信號強度指示算法(RSSI)、到達角度算法(AOA)、到達時間算法(TOA)等。距離無關的算法有:質心法、APIT算法、凸規劃算法等。這些算法都是利用節點之間的鄰近關系實現定位的。
一般來說,基于測距技術的算法比無需測距的精度要高。本文采用基于無線網絡的RFID技術,并在此基礎上提出一種算法,實現誤差范圍小的定位系統。
1系統的硬件結構
射頻識別(Radio Frequency Identification,RFID)俗稱電子標簽。RFID是一種非接觸式的自動識別技術,它通過射頻信號自動識別目標對象并獲取相關數據,識別工作無需人工干預,可工作于各種惡劣環境。RFID技術可識別高速運動物體并可同時識別多個標簽,操作快捷方便。RFID是一種簡單的無線系統,只有兩個基本器件,該系統用于控制、檢測和跟蹤物體。系統由一個詢問器(或閱讀器)和很多應答器(或標簽)組成。
定位系統的硬件包括:閱讀器、電子標簽和無線Wi-Fi模塊。
閱讀器是用于讀取/寫入標簽信息的設備。
電子標簽分為有源和無源兩類。有源技術電子標簽內部有電池,它的壽命一般比無源的長。在電池更換前一直通過設定頻段向外發送信息。本文所采用的有源技術電子標簽具有長時間的壽命。
無線Wi-Fi模塊主要是用于電子標簽、閱讀器以及AP(用于接收標簽的發射信號)之間的通信。
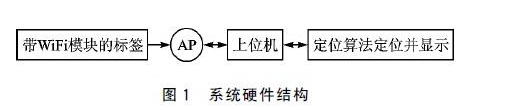
RFID定位可用于倉庫管理、公司人員、物品以及醫院病人的準確定位。但是由于距離限制了其發展,所以把無線Wi-Fi技術和RFID技術結合起來,進一步地提高定位的范圍和精度。系統硬件結構如圖1所示。

2系統軟件及定位算法
2.1基于信號強度算法
傳統的信號傳播容易受到折射、反射、繞射、衍射等影響,接收到的信號強度是各種途徑傳播來的信號的疊加。所以有時候信號強度增大,有時候又減小。經過大量的實踐,發現接收信號強度服從log-normal分布。通過信號在傳播中的衰減來估計節點之間的距離,根據信道模型求解接收到待定位置的信號場強:
![]()
式中:n為路徑損耗指數,與周圍的環境有關;Xσ是標準差為σ的正態隨機變量;d0是參考距離,在室內環境中通常取1 m;PL(d0)為參考位置的信號強度。
假設有n個AP,m個參考標簽,則AP點接收到的待定標簽的強度量P=(AP1,AP2,…,APn),采集到的第t個參考標簽的強度矢量為St=(St1,St2,…,Stn),則待定標簽和參考標簽St之間的歐氏距離為:

基于信號強度算法代表是LANDMARC算法。該算法主要通過比較不同Et來尋找與待定標簽位置最近的參考標簽。當由K個鄰近的參考標簽來確定一個待測標簽的時候,我們稱之為“K-最鄰近算法”,待定標簽坐標是(x,y):
![]()
其中的Wi和(xi,yi)分別是第i個鄰居參考標簽的權重因子和坐標位置。根據經驗:

權重越大的,E值越小。LANDMARC箅法雖然能夠處理比較復雜的環境,但是在一些封閉的環境中可能會出現多徑效應,導致定位精度不高。又有研究者對LANDM ARC算法提出了改進:把不同的閱讀器中收獲到的標簽的RSSI值加入到一個集合,然后求出集合中頻率最高的標簽作為最近距離的標簽,然后再使用經驗公式求出待測標簽的坐標位置。這樣可以獲得更準確的精度。
2.2三邊定位算法
三邊定位法:分別以已知位置的3個AP為圓心,以各個到待測標簽的距離最近參考標簽的距離為半徑作圓。所得的3個圓的交點為D.三角形算法示意圖如圖2所示。

設位置節點D(x,y),已知A、B、C三點的坐標為(x1,y1),(x2,y2),(x3,y3)。它們到D的距離分別是d1、d2、d3.則D的位置可以通過下列方程中的任意兩個進行求解。
但是在實際應用中,由于測量誤差的存在,三個圓交于一點的情況很難存在。而這是經常的事情,這會導致方程無解,無法定位出待測目標的位置。
2.3本文采用的算法
本方案中,我們采用的定位算法是基于接收信號強度的算法(即LANDMARC算法),并在LANDMARC算法的后面利用三邊定位算法,使其更準確。
實驗前在某公司大樓的走道和三間房內各安置每隔3 m固定一個電子標簽(參考標簽),在該層樓的東南兩北角各放置一個AP.做好上位機與下位機的無線通信(軟件程序的服務器和客戶端的連接)。
實驗進行時,當待測標簽進入到AP(4個)的范圍內,開始接收到待測標簽發出的信號場強,并傳入上位機。同時也接收各個參考標簽在各個AP的信號場強,并傳入上位機。
定位算法則把待測標簽在4個AP(AP1,AP2,AP3,AP4)上的場強建立成一個場強矢量,同時參考標簽也建立成場強矢量。通過LANDMARC算法即通過比較待測標簽場強矢量與參考標簽場強矢量的歐氏距離,找出3個歐氏距離最小的參考標簽,并得知3個參考標簽的具體位置(在實驗前期,參考標簽放置時已經有記錄)。對于3個參考點,不用再根據信號的強度來決定其半徑,而是3個以參考點為圓心,以最近參考標簽之間的距離(以確定每隔幾米放置一個參考標簽)的3/4長度為半徑做3個圓,這樣3個圓兩兩相交的可能性會增加。
由于3個圓很難在同一個點相交,所以對于3個圓之間的關系有3種:◆3個圓兩兩相交,并且3個圓有公共區域;◆3個網兩兩相交,但沒有公共區域;◆3個圓不相交。
具體關系如下:
①當3個圓有公共區域時,則公共區域必然有3個交點,以3個交點作三角形,則待測標簽的坐標即是三角形內心坐標。
②當兩兩相交無公共區域時,必然有兩兩公共區域。取兩圓相交區域的兩個交點的連線的中點,然后以這3個中點做三角形,其內心就是待測標簽內心坐標。
③3個圓不相交時舍棄,接受下一組最近3個參考標簽,若3次還沒有找到相交情況,即用3個參考標簽做的位置做三角形,其內心就是待測標簽的位置。
本算法的優勢為在原來LANDMARC算法的定位精度上,再進行三角定位,進一步提高定位精度。同時,以參考標簽之間的距離來進行進一步的三角定位,可以減少額外的計算,并且可以減少由于參考標簽場強的變化帶來的重復測量。
總結
本文主要討論了基于信號強度算法和基于非測距的三邊算法,同時對LANDMARC算法進行了進一步的改進。由相關實驗結果得出:該算法可以達到定位精度在1.5 m左右的誤差,該方案適合廣泛運用。
?









 工商網監
工商網監
評論