 電子發燒友App
電子發燒友App


大家作為射頻工程師一定都進行過微波測試,盡管大部分的RF?和微波測試系統所要量測的對象只有區區幾種廣泛的類別包括放大器、發射器、接收器等,但每一套個別的系統卻會面臨一些不同的環境條件、要求和挑戰。雖然每一種狀況可能都不一樣,不過當我們在定義任何的RF和微波測試系統時,卻有三項共通的因素會相互影響:效能、速度與穩定。
在每一位系統開發者面臨的狀況各有不同的情況下,能否在這三項因素間做的取捨將關系著量測結果是否能達到要求的正確性(integrity)水準。
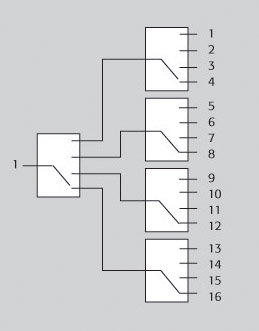
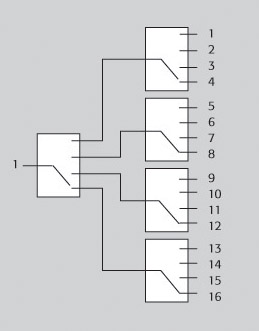
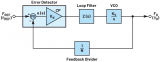
在DUT 到量測儀器之間的路徑上(圖1),有許多個點都會出現這些因素的取捨時機,本文建議了一個考量這些取捨因素的架構,并且提供六大秘訣,教您如何克服RF 信號路徑上常會碰到的問題。
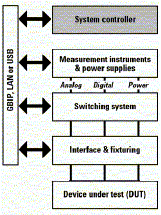
圖1:在所有的測試系統架構下,都有很多的機會可以在效能、速度與穩定之間求取的平衡,以控管量測的正確性。
秘訣一:排定效能、速度與穩定的優先順序
為了讓全部六大秘訣有論述的依據,有必要先釐清我們對效能、速度及穩定的定義。在大部分的情況下,只有其中一個或兩個因素會成為首要的考量條件,主導您的測試需求與設備的選擇。無論如何,仔細地審視效能、速度與穩定之間的相互影響與取捨關系(如表1 到表3 的摘要所列),將可協助您掌控特有的需求狀況。
基本的定義
在RF 和微波測試設備中,安捷倫科技對“效能”的定義主要指的是儀器的準確度、量測范圍和頻寬。儀器的準確度包括明訂的振幅和頻率量測準確度;量測范圍指的是動態范圍、失真、噪音位準和相位噪音,這些屬性會影響信號位準量測的度;而頻寬則是指可以處理和分析的頻率寬度或資料速率。
速度測試系統的速度或Throughput 會取決于所使用的硬件、輸入/ 輸出(I/O)介面和軟件,我們的重點將放在硬件和四項會影響速度的因素上:量測設定時間、量測執行時間、資料處理時間、以及資料傳輸時間。在RF 和微波的頻率,設定時間中非常重要的一環就是DUT 或測試系統在每次變更(例如切換器的開或閉、功率位準改變)之后, 所需的穩定時間(settling time)。
穩定一致性對任何測試系統來說,每的測試以及每天的測試都能產生一致的結果是非常重要的。然而,穩定佳并不代表度也高,因為度會取決于個別儀器的效能,而穩定指的是無論明訂的準確度為何,所量測到的結果都是一致的。就每一部儀器而言,穩定可能會因某些量測或模式而異,因此查看產品的規格或詢問制造商是很重要的。
在某些程度內,透過更多次的平均,或修改演算法以準確地逼近符合標準量測方法所得到的結果,將可以提高穩定。將量測設定(如中心頻率、頻距和衰減位準)的改變次數減到少,可以達到的穩定一致性。
三者的關系概述
測試要求和商業上的考量可以協助您評估效能、速度與穩定之間的相對重要性,一旦您確立了首要的考量條件及其要求的高低程度后,就比較容易理出彼此的關系及其對系統的影響。
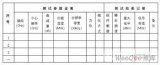
表1、表2 和表3 分別就兩種狀況:首要考量條件的要求為高或低,摘要整理了相互間的影響關系。
表1:以效能為首要的考量條件時,重要的相互影響因素是效能和速度。

表2:以速度為首要的考量條件時,重要的關系在于速度和穩定。

表3:以穩定一致性為首要的考量條件時,重要的關系也是穩定一致性和速度。

穩定與效能
在表1 和表3 中,穩定與效能之間有一個重要的第二層關系,這是由量測不確定度所串起的一種間接關系。面對不確定度時,有些系統開發人員會設計一個“誤差量”(error budget),其大小取決于測試要求與系統不確定度之間的差距。
影響不確定度的兩大主要因素是準確度(儀器的效能)和量測一致性(穩定)。如果系統中的儀器具有很高的準確度,那么誤差量中就有較大的空間可以容忍較低的穩定。如果儀器可以提供一致的結果,那么誤差量中也會有較大的空間可以容忍較低的準確度。
多項要求皆“高”
若要滿足“高速與高穩定”或“高效能與高速”這類多重的要求,可能就需要使用復雜精密的儀器,其價格相較于能力較差的設備自然會稍微高一些。不過,許多高性能的儀器中可能會內建硬件加速器,可以加快一些耗時的作業,如平均計算和校準。
有些機種也可能包含多種演算法,可以計算諸如相鄰頻道功率(ACP)等參數。如果全部三項要求皆“高”,就必須仔細檢查系統的每一個部份-測試設備、切換子系統、纜線、接頭等。的解決方案很可能價格也不低,但可以提供一些額外的功能和優點。
秘訣二:審視DUT 的本質和特性
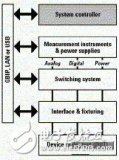
典型的自動化測試系統可以執行三項基本的任務:提供信號源、進行量測、以及進行切換,至于該使用哪一種信號產生器、功率錶、頻譜分析儀、網路分析儀、切換矩陣(switch matrix)和纜線,則取決于DUT 的電性和機構屬性。在RF 和微波的頻率,有一些基本的特性需要特別留意。
電性參數
的基本性質是主要的考量:它是被動和線性的,或是主動和非線性的?被動的線性元件較容易處理,因為它們在整個工作頻寬范圍內所有允許的輸入功率位準下,增益和相位偏移量一般都是固定的。相反地,主動元件就需要格外謹慎,因為它們通常具有非線性的工作區域,對輸入功率相當敏感,可能會在不同的位準產生不同的結果。
如此一來,可能就需要在測試系統中加入放大器或,以地控制功率位準,而且也許還要加入耦合器,將輸入到DUT 的功率位準分一些出來并確認是否正確。這些額外加入的東西千萬不能輕忽:在高頻下,每一個系統組成要件都具有復數的阻抗值(伴隨有S參數),而且每多一項連接就有可能與DUT 產生不必要的相互影響。
避免不匹配:任何連接線的阻抗不匹配
都可能造成注入損耗(insertion loss),而損耗掉信號源或量測信號的一些功率。眾所周知,在高頻下功率是很昂貴的,而且如果必須在很廣的頻率范圍提供所需功率的話,還會變得更加昂貴。
秘訣:使用度高的纜線和配件,且要使用向量式網路分析儀(VNA)充分量測纜線和配件的實際阻抗,特別是如果DUT 是主動元件的話。
將VSWR 降到
切換矩陣加上其接頭、內部和外部纜線、甚至是任何RF 纜線的彎曲半徑等組合,可能因DUT 的電壓駐波而產生誤差。
秘訣:若要將這項誤差減到,可以使用電壓駐波比(VSWR)規格為1:2:1 或更佳的切換矩陣。
增加隔離度
如果您的測試需要同時量測高位準和低位準的信號,則切換矩陣的隔離度規格將會影響量測的正確性。
秘訣:如果通過DUT 的路徑有很多條,可以使用信號產生器和頻譜分析儀,盡可能地量測出隔離度的特性。如果無法做到這一點,則系統在配置和設定時,應該將高位準和低位準的信號繞接到不相鄰的路徑上,或繞經不同的切換器。
機構屬性
另外一組需要考量的細節是信號和電源(交流電或直流電)接頭的數量和類型,這會影響所需的切換矩陣大小,以及系統接線的復雜度等因素。
秘訣:使用埠數足夠的切換矩陣,就可以接好系統到DUT 的所有連接,這樣一來,就可以將等待信號穩定所需的延遲時間縮到短,并且將功率位準突然改變而損壞切換矩陣或DUT 的機率降到。
秘訣三:瞭解、量測及修正RF 信號路徑的特性
如果沒有經過額外的修正,產品的規格多只能延伸到位于儀器輸入和輸出接頭上的“校準”(calibration plane)而已。若要得到準確又穩定一致的量測結果,以及修正過的DUT 結果,我們建議將校準面往外推,盡可能地靠近DUT。
不論路徑是被動或主動的,DUT 是位在本端或遠端,都有幾種方法可以做到。
被動路徑的處理方式
被動元件在整個頻寬范圍內所有允許的輸入功率位準下,都有固定的增益和相位偏移量。然而,沿著被動路徑所接出去的每一條接線上可能會有阻抗不匹配的情形,因而造成注入損耗和相位偏移(或延遲)。在高頻下,連簡單的被動元素也會變成復雜的傳輸線元素,無法直接將路徑上的損耗和相位偏移用簡單的代數法相加得出。
秘訣:使用VNA 來量測整個相連的路徑或分析每一項元素的S 參數特性,并使用向量學來模擬整個路徑的總損耗和相位偏移量。這些數值可以儲存在系統的PC 中,并且視需要予以套用,以修正量測結果,或者供網路分析儀使用,例如用來即時地調整濾波器和其他變動的DUT。
修正主動的路徑
主動元件的效能會隨著輸入功率的改變而不同,若要提高量測的準確度,其做法會取決于元件是在其線性或非線性的響應區內工作。如果一個主動元件(如放大器)在校準和量測作業期間,是在遠低于其1 dB 壓縮點的線性區內工作,則可以在該區內的任何功率位準下進行準確的修正。
秘訣:如果主動元件是在其非線性的響應區內工作,則校準時也必須使用量測用的功率位準,以確保能夠做準確的修正。如果需要在非線性模式下,于多個功率位準進行量測,那么也必須在每一個位準下分別進行校準,并儲存起來供日后使用。
秘訣:在DUT 的頻率范圍內,檢查主動元件的頻率響應。同樣地,您應該在特定的功率位準下量測整個路徑,或是分析每一個介面的S 參數特性,并使用向量學,產生一個可以在事后套用或即時套用的模型。
秘訣:為了簡化量測和修正RF 信號路徑特性的作業,有些系統開發人員會盡可能少用主動元件,這樣做可以減少校準的工夫,以及在非線性模式工作時,因功率位準改變而造成誤差的機會。
審核編輯:湯梓紅
















 工商網監
工商網監
評論