 電子發燒友App
電子發燒友App


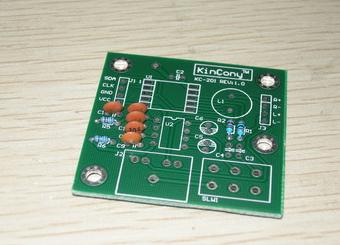
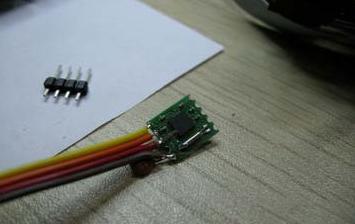
KC-201為FM立體聲收音模塊,配合單片機最小系統電路或本公司單片機實驗板夠完成 88MHz--108MHz頻率的調頻廣播接收。模塊采用TEA5767/CL5767 專用FM芯片,接收穩定可靠。板載TDA2822功放電路,同時有左右聲道音量調節電位器。

模塊主要參數和特點:
????A、采用通用的102BC模塊的封裝。
????B、兼容TEA5767及CL3767軟、硬件(軟件搜索使用IF中頻功率判斷方式,如原機型使用立體聲判斷方式的只需少做軟件改動即可)。
????C、靈敏度高、噪聲小、搞干擾能力強、外接元件極少、使用極其簡單,板子尺寸為 47mm*48mm 。
????D、I2C串行數據總線接口通訊。
????E、采用先進的SEEK硬件搜臺方式,全頻段搜索只需4~5Sec,在幅提高搜臺速度。
????F、內置LDO調整、低功耗、超寬電壓使用范圍(2.7~5.5VDC)。
????G、內置噪聲消除、軟靜音、低音增強電路設計。
????H、FM及MPX立體聲采用DSP處理器。
????I、應用簡便、成本低,性價比高。
KC-201 FM立體聲收音模塊接口說明:
????模塊左側“J1”是與單片機連接的IIC總線接口,分別為:SDA(數據)、CLK(時鐘)、GND(地)、VCC(電源)
????模塊右側“J3”是音頻輸出口:R+(右聲道輸出線+)、R-(右聲道輸出線-)、L+(左聲道輸出線+)、L-(左聲道輸出線-)
????模塊左下側“J2”為外置耳機插孔,插上耳機后,左右聲道音頻輸出自動切換到耳機上,拔掉耳機后,左右聲道輸出自動切換到J3輸出端。
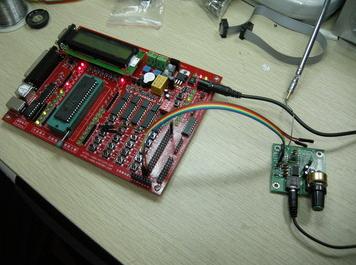




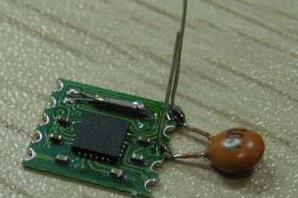
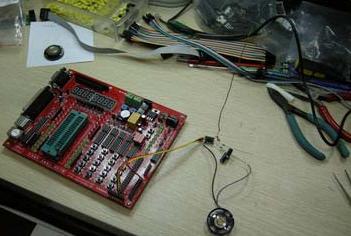
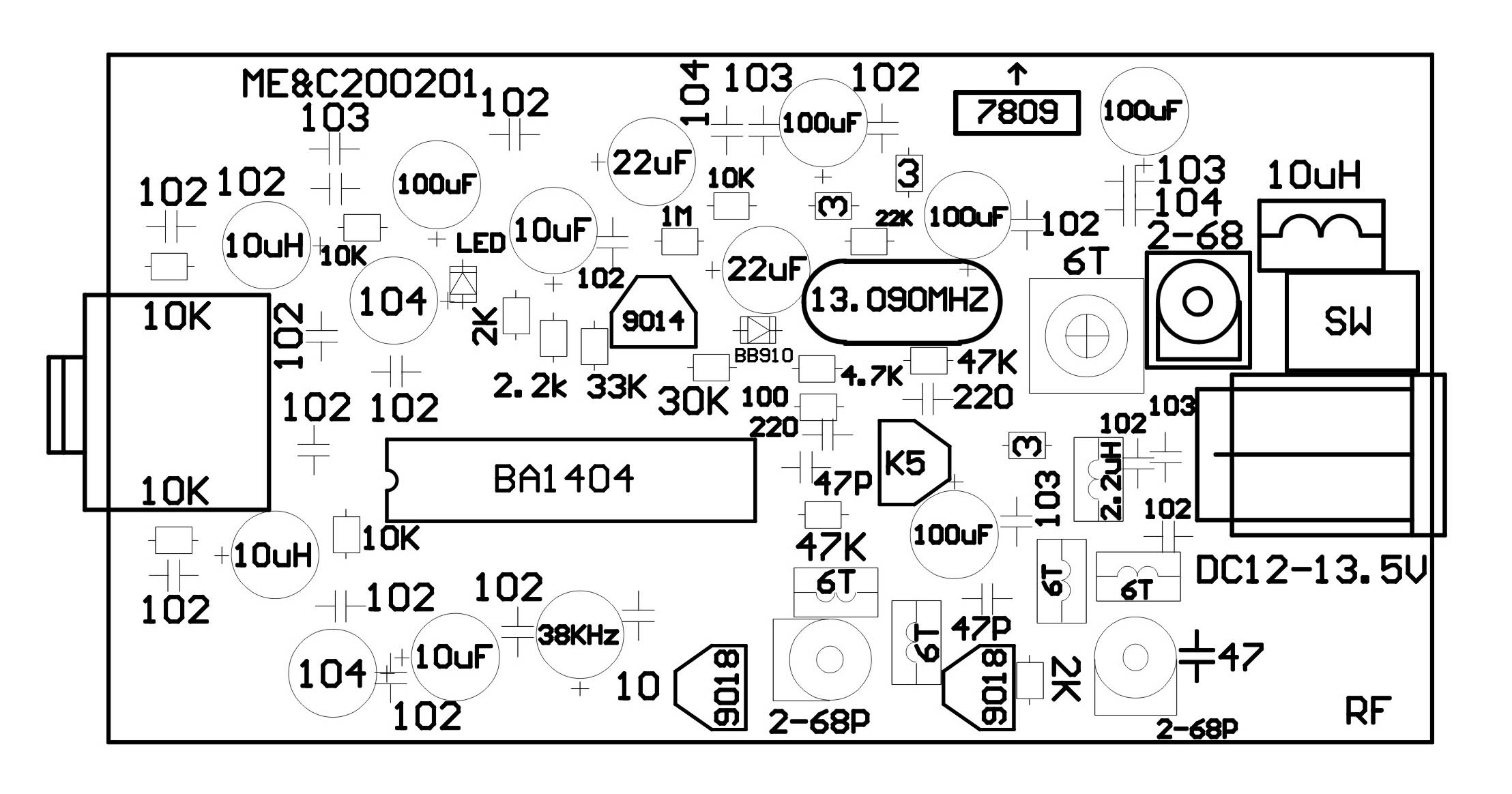
以下是我們在完成FM收音模塊開發中使用分立元件搭焊的試驗過程:
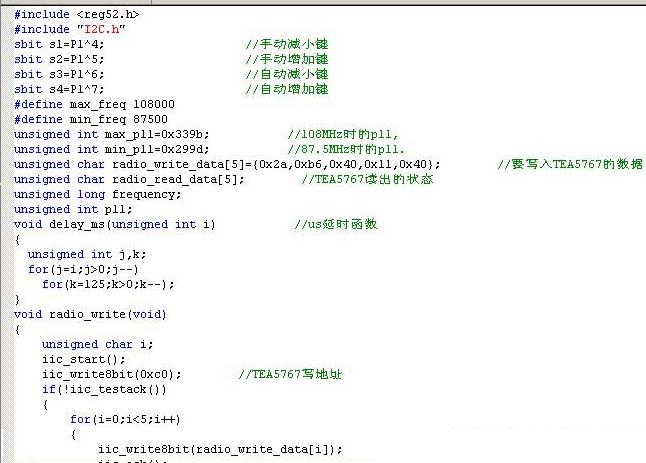
????我們用5767收音模塊通過搭焊與實驗板相連,做成了整個收音實驗,TDA5767和CL5767的指令完全兼容,可以直接代換。其實TEA5767的控制也不算很難,只要看懂了TEA5767.pdf(這個在我們的網站上可以下載到),然后用C51就可以控制它,實現FM收音功能。下面就來談談TEA5767的編程思路,希望對有興趣弄這個芯片的朋友有些幫助。
??? (1)首先選擇好你硬件的晶振,這在輸入模式的相應位設置,只有兩種晶體選擇!一種是32.768KHz,一種是13MHz。通過字節4的XTAL可以控制:當XTAL=1時,用的是32.768KH,而當XTAL=0時,用的是13MHz。當然大家應該要清楚,這個晶振外接的哦。
????(2)選擇好收音的制式,有日本和歐洲兩種模式,其頻率覆蓋范圍不同。
????(3)將輸出模式選擇立體聲,不要使能全體靜音和左右靜音。這個可以通過字節3控制,具體請看TEA5767.pdf。
????(4)其它幾個音效控制位可以不理會!如HCC,SNC。其實,我初始化是將date[2]=0x20, date[3]=0x11, date[4]=0x00,當然具體的還得看你的硬件部分這么接的拉。
????(5)有兩個擴展輸出端口,可以做指示和其他控制,但是PORT1可以兼職做內部狀態指示,由SI控制。
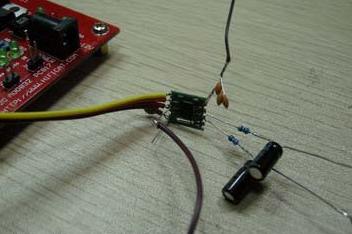
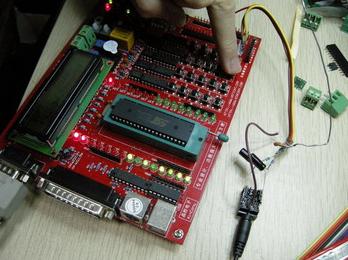
下面我們來分享一下試驗全過程,我們使用搭焊的方式來完成,因為外圍電路很簡單,只要接上天線、電源和音頻輸出就可以了:








 ]
]
[page_break]
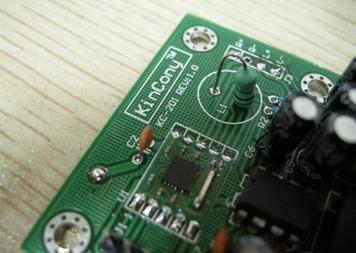
KC-201 FM立體聲收音模塊 元件分布說明: 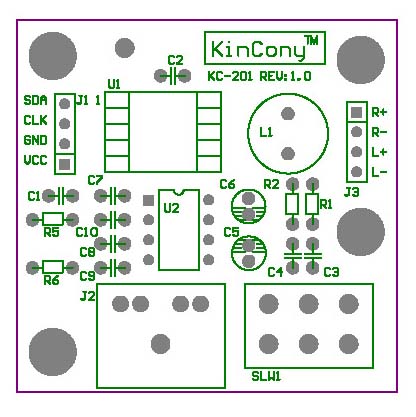
模塊相關背景知識介紹:
FM模塊知識:
??? CL3767是一片低功耗電調諧調頻立體聲收音機電路,其內部集成了中頻選頻和解調網絡,可以做到完全免調,因此只需要很少量的小體積外圍元件。CL3767HN可以應用在歐洲、美國和日本不同的FM波段環境。該產品具有如下特點:
高靈敏度(使用低噪聲射頻輸入放大器)
兼容美國/歐洲(87.5 to 108 MHz)和日本(76 to 91MHz)調頻波段
預調諧接收日本電視伴音至108 MHz
高放自動增益控制(AGC)電路
LC調諧振蕩用低成本固定芯片
調頻中頻選擇在內部完成,中頻免調
三種振蕩基準頻率輸入32.768K、13M、6.5M
鎖相環調諧系統
由總線模式管腳來選擇I2C總線模式或三線模式
由總線輸出7位中頻計數,由總線輸出4位電平
軟靜音,立體聲消噪(SNC),高電平切割(HCC)
軟靜音,立體聲消噪(SNC),高電平切割(HCC)能通過總線關斷
免調諧立體聲解碼器,自動搜索調諧功能
待機模式
兩個軟件可編程端口,總線輸入,輸出線三態模式
自動調節溫度范圍(在VCCA, VCC(VCO) 和VCCD = 5 V)
軟件編程說明:
(1)I2C-總線說明
I2C 總線是通過二根I2C 總線是通過二根線(串行數據線和串行時鐘線)來連接器件之間通信的總線,并根據地址識別每個器件。啟動總線后的第一個字節的高七位是從器件的尋址地址。
IC 的地址為C0:1100000 。
I2C 總線的邏輯結構:收發機。
最低位未使用。
最大低電平和最小高電平分別限定在0.2VCCD和0.45VCCD。
總線模式(BUSMODE)引腳必須接地時工作在I2C-總線模式
注:總線工作在最大時鐘頻率為400KHz,不能連接IC到一個正工作在高時鐘的總線上。
(2): 數據傳輸數據順序:地址,字節1,字節2,字節3,字節4,字節5(數據傳送必須按順序)。地址最
低位為“0”,表示寫操作到CL5767。 每個字節的第七位被認為是最高位,并作為字節的第一位傳送。 在時鐘的下降沿,數據變為有效信號。在每一字節后面的停止信號可以縮短傳送時間。
在整個傳輸完成之前發送一個停止條件: 保留的字節將包含以前的信息。 如果一個字沒有傳送完,新的字節將被使用,但新的調諧周期不會開始。 通過standby位設置,芯片可以工作在省電的待機模式;總線仍然激活。屏蔽總線界面可以減小待機電流。如果總線界面被屏蔽則程序沒有待機模式,芯片維持正常工作,但已經脫離總線。軟口1能夠被用作調諧指示器輸出,在搜臺沒有完成的時候,軟口1輸出低電平。當搜到預先設置的臺或搜索完成或界定波段達到時,軟口1輸出高電平。當第五字節最大有效位設置為邏輯1時,鎖相環的參考頻率改變。調諧系統能夠工作在XTAL2引腳接6.5MHz晶振。
(3):上電復位在上電復位時,靜音位置“1”,其他所有位置“0”。為了初始化集成塊所有位必須重新設定。
(4): I2C-總線協議表1:寫模式 ![]()
注意:1:S 為啟動條件。
- 2:A 為應答信號。
- 3:P 為停止條件。
表2:讀模式 ![]()
注意:1:S 為啟動條件。
2:A 為應答信號。表3:IC 地址位
|
? |
? |
? |
IC 地址 |
? |
? |
模式 | |
|
1 |
1 |
0 |
? |
0 |
0 |
0 |
R/W |
注:1:讀或者寫模式
a) 0 對CL5767 寫操作。
b) 1 對CL5767 讀操作。
(5): 3-線說明3-線控制:寫/讀,時鐘和數據線;工作在最大時鐘頻率為1MHz。提示:通過standby位設置,芯片可以工作在省電的待機模式。在待機模式下芯片必須設置在寫模式。在待機期間,當芯片設置為讀模式時,芯片會保持數據。屏蔽總線界面可以減小待機電流。如果總線界面被屏蔽則程序沒有待機模式,芯片維持正常工作,但已經脫離時鐘和數據線。
(6):數據傳輸數據順序:地址,字節1,字節2,字節3,字節4,字節5(數據傳送必須按順序)。 在寫/讀控制的上升沿可以寫數據到芯片。在時鐘的上升沿之前,數據必須為有效信號。當時鐘為低時可改變數據信號,在時鐘的上升沿時數據被寫入芯片。在以開始二字節或每個字節之后,如果有新的開始信號,數據傳輸被停止。 在寫/讀控制的下降沿可以從芯片讀數據。當時鐘為低時,寫/讀控制改變。在寫/讀控制的下降沿數據端出現第一個字節的最大有效位。在時鐘下降沿移存數據,在上升沿讀數據。要實現兩個連續的讀或寫操作,寫/讀必須固定在最少一個時鐘周期。當一個搜索調諧請求被發送時,芯片將自動開始搜索,搜索方向和搜索停止電平可以設置。當搜到一個強度等于或大于停止電平時,調諧系統停止且準備好標志位為高。在搜索期間,當一個制式已經符合時,調諧系統停止且制式標志位為高。在這種情況下準備好標志位也為高。 軟口1能夠被用作調諧指示器輸出,在搜臺沒有完成的時候,軟口1輸出低電平。當搜到預先設置的臺或搜索完成或界定波段達到時,軟口1輸出高電平。當第五字節最大有效位設置為邏輯1時,鎖相環的參考頻率改變。調諧系統能夠工作在XTAL2引腳接6.5MHz晶振。
(7): 上電復位在上電復位時,靜音位置“1”,其他所有位任意設置。為了初始化集成塊所有位必須重新設定。
(8):寫數據 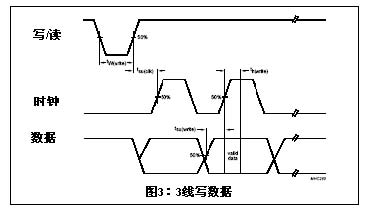
表4:寫模式 ![]()
表5 數據字節1 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
MUTE |
SM |
PLL13 |
PLL12 |
PLL11 |
PLL10 |
PLL9 |
PLL8 |
表6 數據字節1 的各個位描述
位號 |
符號 |
描述 |
|
7 |
MUTE |
如果MUTE=1,則左右聲道被靜音;MUTE=0,左右聲道正常工作。 |
|
6 |
SM |
如果SM=1,則處于搜索模式;SM=0,不處于搜索模式。 |
|
5 到0 |
PLL[13:8] |
設定用于搜索和預設的可編程頻率合成器。 |
表7 數據字節2 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
PLL7 |
PLL6 |
PLL5 |
PLL4 |
PLL3 |
PLL2 |
PLL1 |
PLL0 |
表8 數據字節2 的各個位描述 ![]()
表9 數據字節3 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
SUD |
SSL1 |
SSL0 |
HLSI |
MS |
ML |
MR |
SWP1 |
表10 數據字節3 的各個位描述
位號 |
符號 |
描述 |
|
7 |
SUD |
SUD=1,增加頻率搜索;SUD=0,減小頻率搜索。 |
|
6 和5 |
SLL[1:0] |
搜索停止標準:見下表1。 |
|
4 |
HLSI |
高/低充電電流切換:HLSI=1,高充電電流; HLSI=0,低充電電流。 |
|
3 |
MS |
立體聲/單聲道:MS=1,單聲道;MS=0,立體聲。 |
|
2 |
ML |
左聲道靜音:ML=1,左聲道靜音并置立體聲,ML=0,左聲道正常。 |
|
1 |
MR |
右聲道靜音:MR=1,右聲道靜音并置立體聲,MR=0,右聲道正常。 |
|
0 |
SWP1 |
軟件可編程端口1:SWP1=1,端口1 高電平;SWP1=0 ,端口1 低電平。 |
表11:搜索停止標準設定
SSL1 |
SSL2 |
搜索停止標準 |
|
0 |
0 |
在搜索模式下禁止 |
|
0 |
1 |
低:ADC 輸出大小為5 |
|
1 |
0 |
中:ADC 輸出大小為7 |
|
1 |
1 |
高:ADC 輸出大小為10 |
表12:數據字節4 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
SWP2 |
STBY |
BL |
XTAL |
SMUTE |
HCC |
SNC |
SI |
表13:數據字節4 的各個位描述
位號 |
符號 |
描述 |
|
7 |
SWP2 |
軟件可編程端口2:SWP2=1,端口2 高電平;SWP2=0,端口2 低電平。 |
|
6 |
STBY |
等待:STBY=1,處于待機模式,STBY=0,退出待機模式。 |
|
5 |
BL |
波段制式:BL=1,日本調頻制式;BL=0,美國/歐洲調頻制式。 |
|
4 |
XTAL |
如果XTAL=1 ,那么fxtal=32.768KHz; 如果XTAL=0 ,那么fxtal=13MHz。 |
|
3 |
SMUTE |
軟件靜音:SMUTE=1,軟靜音打開;SMUTE=0,軟靜音關閉。 |
|
2 |
HCC |
白電平切割:HCC=1,高電平切割打開,HCC=0,高電平切割關閉。 |
|
1 |
SNC |
立體聲噪聲去除:如果SNC=1,立體聲消噪除打開,如果SNC=0,立體聲消噪除關閉。 |
|
0 |
SI |
搜索標志位:SI=1,SWPORT1 輸出準備好信號;SI=0,SWPORT1 作為軟件可編程端口1 用。 |
表14:數據字節5 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
PLLREF |
DTC |
? |
? |
? |
? |
? |
表15:數據字節5 的各個位描述
位號 |
符號 |
描述 |
|
7 |
PLLREF |
若PLLREF=1,6.5MHz 的鎖相環參考頻率啟用;若PLLREF=0,6.5MHz 的鎖相環參考頻率關閉。 |
|
6 |
DTC |
若DTC=1,去加重時間常數為75us; 若DTC=0,去加重時間常數為50us。 |
|
5 到0 |
? |
未用,狀態不必考慮。 |
(9):讀數據 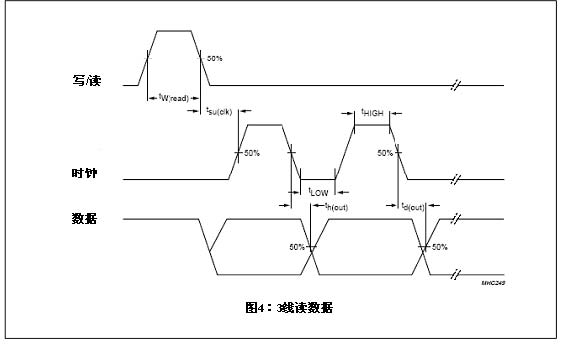
表16:讀模式表17:數據字節1 的格式 ![]()
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
BLF |
PLL13 |
PLL12 |
PLL11 |
PLL10 |
PLL9 |
PLL8 |
表18:數據字節1 的各個位描述
位號 |
符號 |
描述 |
|
7 |
RF |
準備好標志:RF=1, 有一個頻道被搜到或者一個制式已經符合;RF=0, 沒有頻道被搜到。 |
|
6 |
BLF |
波段制式:BLF=1,一個制式已經符合;BLF=0,沒有制式已經符合。 |
|
5 到0 |
PLL[13:8] |
用于搜索和預設后的可編程頻率合成器設定結果。 |
表19:數據字節2 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
PLL7 |
PLL6 |
PLL5 |
PLL4 |
PLL3 |
PLL2 |
PLL1 |
PLL0 |
表20:數據字節2 的各個位描述 ![]()
表21:數據字節3 的格式
|
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
STEREO |
IF6 |
IF5 |
IF4 |
IF3 |
IF2 |
IF1 |
IF0 |
表22:數據字節3 的各個位描述
位號 |
符號 |
描述 |
|
7 |
STEREO |
立體聲標志位:STEREO=1,立體聲接收;STEREO=0,單聲道接收。 |
|
6 到0 |
IF[6:0] |
中頻計數器結果。 |
表23:數據字節4 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
LEV3 |
LEV2 |
LEV1 |
LEV0 |
CI3 |
CI2 |
CI1 |
0 |
表24:數據字節4 的各個位描述
位號 |
符號 |
描述 |
|
7 到4 |
LEV[3:0] |
ADC 的輸出。 |
|
3 到1 |
CI[3:1] |
芯片驗證號。 |
|
0 |
? |
該位內部置0。 |
表25:數據字節5 的格式
位7(高位) |
位6 |
位5 |
位4 |
位3 |
位2 |
位1 |
位0(低位) |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
表26:數據字節5 的各個位描述 ![]()
(10): 總線傳輸時間表27:數字電平和傳輸時間
符號 |
參數 |
條件 |
最小值 |
最大值 |
單位 |
|
數字輸入 |
? |
? |
? |
? |
? |
|
VIH |
輸入高電平 |
? |
0.45VCCD |
V | |
|
VIL |
輸入低電平 |
? |
0.2VCCD |
V | |
|
數字輸出 |
? |
? |
? |
? |
? |
|
Isink(L) |
低電平吸收電流 |
? |
500 |
μA | |
|
VOL |
低電平輸出電壓 |
IOL = 500 μA |
450 |
mV | |
|
傳輸時間 |
? |
? |
? |
? |
? |
|
fclk |
時鐘輸入頻率 |
I2C總線 |
400 |
kHz | |
|
3-線 |
1 |
MHz | |||
|
tHIGH |
時鐘高電平時間 |
I2C總線 |
1 |
μs | |
|
3-線 |
300 |
ns | |||
|
tLOW |
時鐘低電平時間 |
I2C總線 |
1 |
μs | |
|
3-線 |
300 |
ns | |||
|
tW(write) |
寫操作脈沖寬度 |
3-線 |
1 |
μs | |
|
tW(read) |
讀操作脈沖寬度 |
3-線 |
1 |
μs | |
|
tsu(clk) |
時鐘建立時間 |
3-線 |
300 |
ns | |
|
th(out) |
讀操作數據輸出控制時間 |
3-線 |
10 |
ns | |
|
td(out) |
讀操作輸出延遲時間 |
3-線 |
100 |
ns | |
|
tsu(write) |
寫操作建立時間 |
3-線 |
100 |
ns | |
|
th(write) |
寫操作控制時間 |
3-線 |
100 |
ns |













 工商網監
工商網監
評論