 電子發燒友App
電子發燒友App


引 言
多媒體技術實用化的關鍵技術之一,就是解決視頻、音頻數字化以后數據量大,與數字存儲媒體、通信網容量小的矛盾,其解決途徑就是壓縮。
為了支持低比特率視頻傳輸業務,MPEG(Moving Picture Expert s Group) 推出了MPEG 4 標準。于1999 年正式成為國際標準的MPEG 4 是一個適合于低傳輸率的視頻、音頻解決方案,更注重于多媒體系統的交互性和靈活性。MPEG 4 視頻壓縮標準提供了一種高度靈活、基于“內容”的編碼方法,解碼端可以“按需解碼”,還可以添加對象和信息。這種靈活性使得MPEG 4 具有高效的編碼效率、基于內容的可擴展性以及在易受干擾環境下的魯棒性。MPEG 4 的這些特性使得它十分適合于存儲容量有限的手持終端設備。但是MPEG 4 視頻解碼中涉及的反量化( Inverse Quantization , IQ) 、反離散余弦變換( Inver se Discrete Cosine Transform , IDCT) ,運動補償(Motion Composition , MC) 等技術均是典型的計算密集型變換,對于本身處理能力有限,功耗受限的手持終端設備而言,視頻解碼的實時性是一個很大的挑戰。
本系統在Nios II 和FPGA 構成的SOPC 平臺上,使用NiosII 的用戶自定義指令以硬件邏輯方式實現MPEG4 解碼中的IQ、IDCT、MC 等計算復雜、高度耗時的功能模塊,極大地提高解碼速度。從而在以GPL 協議發布的XviD Codec 基礎上,實現Simple Profile 視覺框架下,L1 級、QCIF(177 ×144 分辨率) 、25 fps 的MPEG 4 實時解碼,并通過DMA 方式在LCD 上加以顯示。
系統功能描述
本系統從功能上可以分為視頻文件存取、視頻解碼器、YUV2RGB 變換器和LCD 控制模塊4 個部分。
視頻文件存取
要進行視頻文件的播放,首先需要對視頻文件進行方便地存儲和讀取。系統播放的MP4 文件由XviD Codec在PC 上對4 ∶2 ∶0 的YUV 文件壓縮得到。該MP4 文件采用177 ×144 分辨率的QCIF 格式,25 幀/ s。在下載模式,可以通過J TAG 接口將MP4 文件寫入Flash 存儲器中。在播放模式下,Nios II 處理器將MP4 文件從Flash存儲器中讀出,送入文件緩沖池中等待解碼器對其進行讀取并解碼。
視頻解碼器
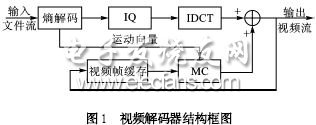
視頻解碼器是系統的核心。如圖1 所示,視頻解碼器由熵解碼器、反量化、反離散余弦變換、運動補償模塊和視頻幀緩存5 個模塊組成。
?
解碼時,首先對輸入碼流進行熵解碼,然后根據幀的頭信息判斷幀的類型。對于每個宏塊,熵解碼后首先經過IQ ,再經過IDCT 變換得到空間域的值。對于參考幀( RFrame) ,由于不需要進行運動補償,變換后的結果直接輸出,同時還要將它存儲在視頻幀緩存中,留給后面的預測幀( PFrame) 做運動補償。對于預測幀,先通過熵解碼得到運動向量,根據運動向量搜索到相應的參考幀后,再將IDCT 變換后的預測差值與之相加,合成最后的預測幀圖像。解碼后的預測幀同樣是一路輸出,一路存放于視頻幀緩存當中。
視頻解碼如果采用純軟件方式實現,運算量太大,難以滿足實時性要求。利用NiosII 的自定義指令,將IQ、IDCT 和MC 這3 個主要的計算密集型解碼單元用硬件邏輯方式實現,以硬件邏輯的復雜性換取解碼的實時性。
YUV2RGB 變換器
解碼器解碼得到的YUV 格式圖像不適合直接用于LCD 顯示。要在LCD 上顯示解碼得到的圖象必須將YUV格式的圖像轉換為RGB 格式,兩者的轉換關系如下:
R =1. 164 ( Y - 16) +1. 569 (V - 128)
G=1. 164( Y - 16) +0. 813(V - 128) +0. 391(U - 128)
B =1. 164 ( Y - 16) +2. 018 (U - 128)
YUV 到RGB 格式的轉換是一個很占用CPU 資源的過程。本系統以查表的方式,采用硬件邏輯實現該轉換。
LCD 控制模塊
標準VGA LCD 顯示模塊(640 ×480 , @60 Hz) 是一種逐行掃描設備。這種掃描是順序的,下一個掃描點能夠預知,從而可以將需要送出的像素信息排成一行,看作一個數據流( St reaming) 。借助于NiosII 的Avalon 流模式外設的設計方法,可以實現一個Avalon 流模式的LCD 控制器。利用DMA 控制器在流模式的LCD 控制器和系統SDRAM 之間建立一條DMA 傳送通道,由硬件完成像素信息的讀取和送出。NiosII 只需要操作SDRAM 中的相應區域就可完成顯示圖像的更新。
系統設計結構
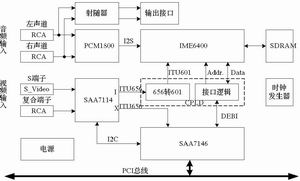
系統硬件結構
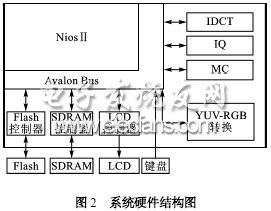
系統硬件結構如圖2 所示。
?
為了達到25 fps 的實時解碼速度, IDCT、IQ、MC 和YUVRGB 轉換這4 部分計算密集型的功能單元全部以用戶自定義指令的方式實現。
反量化
系數的二維數組QF[ v][ u]被反量化,產生重構的DCT系數。該過程的實質是以量化步長為倍數的乘法運算。

?
內部編碼塊DC 系數的反量化過程不同于其他的AC系數。DC 反量化系數由一個常數因子intra_dc 與QF[ 0 ][0]相乘而得到。intra_dc 與編碼精度有關,表1 顯示的即為兩者對應關系。
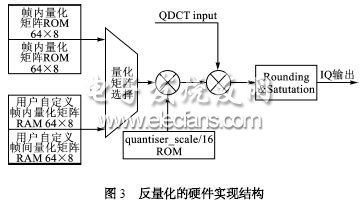
AC 系數的反量化要用到兩個加權矩陣,分別用于內部子塊和非內部子塊。用戶也可以使用自定義的量化矩陣。
如果用QDCT 表示輸入已量化的AC 系數,用DCT 表示反量化后的AC 系數,那么AC 系數的IQ 變換公式如下:

?
式中,quantiser_scale 為0~112 之間的兩組數值,分別對應不同的比特流控制狀態。但是在本系統采用的XviDCodec 版本中,比特流控制功能并沒有得到實現,所以這里quantiser_scale 的取值固定。
反量化得到的結果通過飽和化,使其限制在[ - 2048 ,+ 2047 ]之間。
IQ 在FPGA 上按照圖3 的框圖進行硬件實現。
反離散余弦變換
IDCT 是DCT 的逆過程,用于還原DCT 系數矩陣。
IDCT 過程可由下面的公式描述:

?
上式可視為一個2 個8 元向量的點積:
圖4 反離散余弦變換的硬件實現結構
將8 元的輸入向量[ X0 , X1 , X2 , X3 , X4 , X5 , X6 ,X7 ]分成奇元素[ X1 , X3 , X5 , X7 ]和偶元素[ X0 , X2 , X4 ,X6 ] ,8 ×8 矩陣則用2 個4 ×4 矩陣來代替,奇元素和偶元素分別與這2 個矩陣v 和u 相乘,生成2 個4 ×4 向量p 和q,通過加減向量p 和q ,可得到輸出向量x。
算法可以表示成下面的公式:
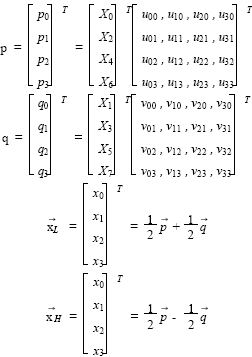
?
基于8 ×8 矩陣的IDCT 算法,在FPGA 上按照圖4所示的結構加以硬件實現。
運動補償
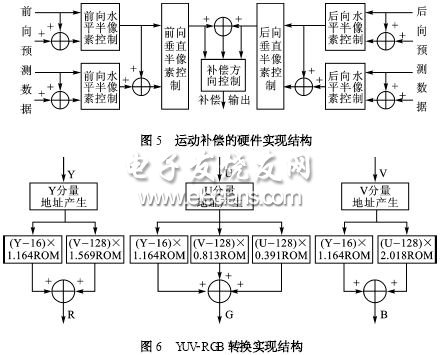
運動補償是一種大量、單調的運算。為了能實現運動補償,采用了多級、多個運算單元并行流水運算的方式,如圖5 所示。
運動補償模塊的控制很復雜。實際設計時將它分成幾個子模塊:補償控制、補償地址產生、差分數據提供以及補償運算。這幾個子模塊直接采用硬件邏輯設計,運行時無需NiosII 處理器干預。其中補償控制是完成整個運動補償的控制,提供輸入控制信號、輸出控制信號、緩存控制信號、預測數據和差分數據等;補償地址產生用于生成預測數據在幀緩存中的地址及補償結果的寫地址;差分數據負責接收IDCT 的結果,通過緩存在適當時機提供補償使
用;補償運算則完成最終預測數據的計算。
YUV-RGB 轉換
根據YUV 到RGB 色彩空間的轉換關系,對每個乘積項都預先做出結果, 存放在ROM 當中。對每一個YUV 分量的輸入,由硬件邏輯產生存取地址,并進行加法運算,從而得到對應的結果。其實現結構如圖6 所示。
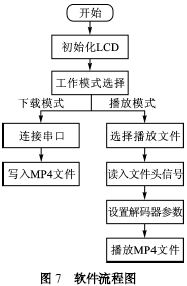
系統軟件工作流程
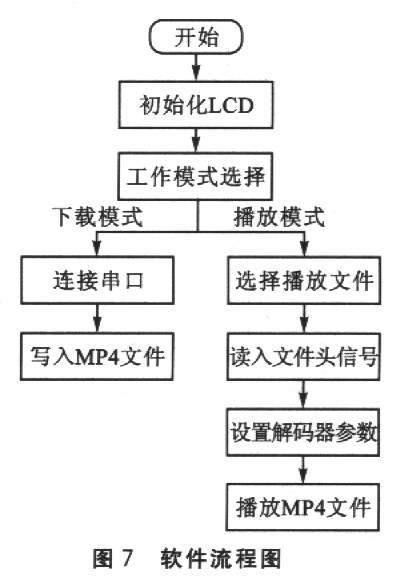
本系統的軟件工作流程如圖7 所示。
結 語
該系統采用基于Altera FPGA 嵌入式軟核的SOPC平臺實現,具有較低的硬件成本, IP 核的大量使用,良好的系統擴展性的特點。










 工商網監
工商網監
評論