 電子發(fā)燒友App
電子發(fā)燒友App


就在前天,隔壁鄰居家的房子被租出去了。因?yàn)槲沂寝r(nóng)村的,房子都是獨(dú)立的帶院子的,沒錯就是這樣的:
因?yàn)榧依锝?jīng)常沒人住,并且還放有其他貴重物品,生怕一不留神,這些租戶跳到我家。把這些東西洗劫一空。此時我已經(jīng)安耐不住內(nèi)心的小激動!那么。搭建一個智能監(jiān)控系統(tǒng)可好!
2:新聞報道
2017年7月13日訊,家庭攝像頭遭入侵,公民隱私被侵犯的案子,已經(jīng)破了。今天傍晚,市公安局發(fā)布消息稱,19天內(nèi),北京警方成功打掉了全國首例網(wǎng)上傳播家庭攝像頭破解軟件的犯罪鏈條,抓獲涉案人員24名。
這些人的腦袋都秀逗了吧,這都能干出來,嚇得我趕緊自己搭建了一個智能監(jiān)控系統(tǒng)。
3:方案設(shè)計詳解
先大概敘述一下MS的功能,
1:硬件部分
兩個USB高清攝像頭,
一個超聲波傳感器(HC-SR04),
一個樹莓派3 modelB,
散熱扇(很重要!)
對于超聲波傳感器,主要的功能就是檢查距離的變化,也就是說當(dāng)檢測是有運(yùn)動物體的產(chǎn)生,才會激活攝像頭。
1:也是為了減輕樹莓派CPU負(fù)荷
2:合理利用那可憐的32G內(nèi)存卡,
對于兩個攝像頭,一個放置在家門口的過道里,每當(dāng)來人的時候,超聲波傳感器變化檢測到運(yùn)動物體,這時會激活攝像頭便會捕捉一系列圖片,讓系統(tǒng)進(jìn)行分析,包括面部,身體等信息,所以,這個攝像頭要求拍攝的質(zhì)量和角度要很好,另一個攝像頭這放置在院子的邊角,要求能照到整個院子,這個攝像頭主要任務(wù)就是檢測人體,并不強(qiáng)求識別出人臉,畢竟距離太遠(yuǎn)。
對于樹莓派,做個監(jiān)控系統(tǒng)的話,不能一直把電腦放在上面吧,那樣太浪費(fèi)資源了,所以當(dāng)時狠心的買了個3B,不過還好用起來不錯,他的角色就是處理硬件傳回來的各種信息。。。
2:代碼部分
下面慢慢道來!
0×02:環(huán)境搭建
curl安裝: sudo apt-getinstall curl
MySQLdb安裝: sudo apt getinstallpython-pip sudo apt-getinstalllibmysqlclient-dev pipinstallmysql-python
LAMP: sudo apt-getinstallapache2 sudo apt-getinstallphp7.0sudo apt-getinstalllibapache2-mod-php7.0sudo apt-getinstallmysql-serversudo apt-getinstallphpmyadmin sudo chmod777/var/www/html/ sudoln-s /usr/share/phpmyadmin /var/www/html/ sudo sed -i‘s/;extension=php_mbstring.dll/extension=php_mbstring.dll/’/etc/php/7.0/apache2/php.ini sudo /etc/init.d/apache2 restart mysql--user=root -pCREATEDATABASEIFNOTEXISTS`MS`DEFAULTCHARACTERSETutf8COLLATEutf8_general_ci;USE`MS`;CREATETABLE`None`(`None`int(11)NOTNULL)ENGINE=InnoDBDEFAULTCHARSET=utf8;
OpenCV: sudo apt-getinstallbuild-essential sudo apt-getinstallcmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-getinstallpython-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev gitclonehttps://github.com/0x024/opencv.git cd ~/opencv mkdirreleasecdreleasecmake -DCMAKE_BUILD_TYPE=RELEASE-DCMAKE_INSTALL_PREFIX=/usr/local.。 make -j1 sudo makeinstall
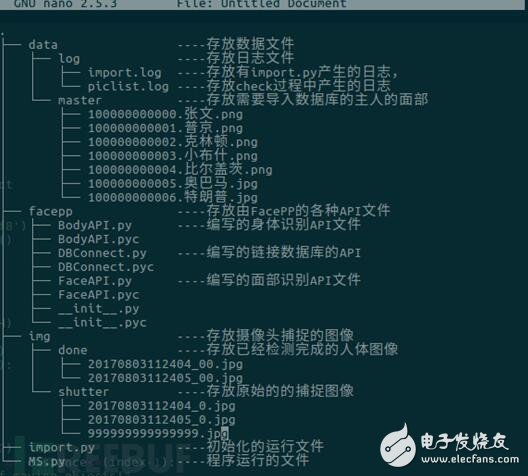
0×03: 目錄樹
0×04:代碼分析
1:MS.py(monitor system的簡稱)
總體文件函數(shù)的分布!

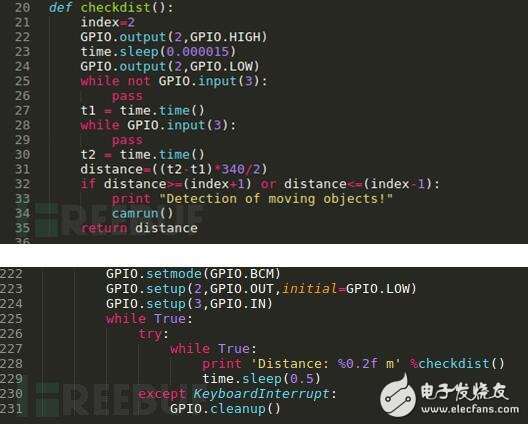
checkdist()
首先來了解一下HC-SR04超聲波傳感器
采用IO口TRIG觸發(fā)測距,給至少10us的高電平信號;
模塊自動發(fā)送8個40khz的方波,自動檢測是否有信號返回;
有信號返回,通過IO口ECHO輸出一個高電平,高電平持續(xù)的時間就是超聲波從發(fā)射到返回的時間。測試距離=(高電平時間*聲速(340M/S))/2
引腳與樹莓派連接方式:
VCC,超聲波模塊電源腳,接5V電源即可
Trig,超聲波發(fā)送腳,高電平時發(fā)送出40KHZ出超聲波
Echo,超聲波接收檢測腳,當(dāng)接收到返回的超聲波時,輸出高電平
GND,超聲波模塊GND
這里附上樹莓派串口的原理圖!方便自定義連接
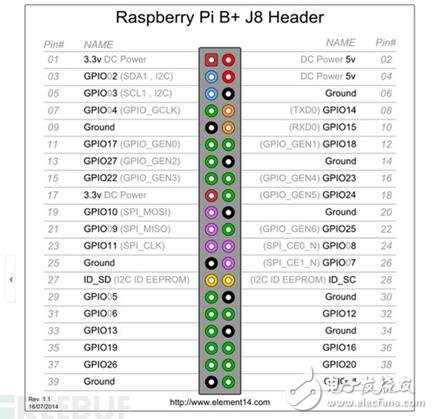
這里我將VCC連接至 Pin#02,將Gnd連接至Pin#06,將Trig連接至Pin#03,將Echo連接至Pin#05
因?yàn)橹霸O(shè)置成了GPIO.setmode(GPIO.BCM),所以在寫的時候都要寫成Name那一列,Pin#只是指示作用!
這里我自定義了一個index。默認(rèn)的值就是傳感器在無運(yùn)動物體下所穩(wěn)定的int值,這個需要根據(jù)傳感器擺放位置自行設(shè)定。
初始化時將trig和echo端口都置低,首先向給 trig 發(fā)送至少10 us的高電平脈沖(模塊自動向外發(fā)送8個40K的方波),然后等待,捕捉 echo 端輸出上升沿,捕捉到上升沿的同時,打開定時器開始計時,再次等待捕捉echo的下降沿,當(dāng)捕捉到下降沿,讀出計時器的時間,這就是超聲波在空氣中運(yùn)行的時間,按照 測試距離=(高電平時間*聲速(340M/S))/2 就可以算出超聲波到障礙物的距離。
接著,當(dāng)distance發(fā)生明顯的變化時候,可以認(rèn)定,有運(yùn)動物體的產(chǎn)生。這時候,就會調(diào)用下一下函數(shù)camrun()
camrun()
可能會覺得上圖函數(shù)有點(diǎn)多余,其實(shí)不然,圖示的這種是適合于小區(qū)的只有一個門口的家庭,想想也對,
當(dāng)使用兩個攝像頭的時候,就會用到如圖的函數(shù),這里用到了最簡單的多線程thread,(PS:本人能力有限,暫時還沒法理解threading這個自定義的多線程方法,),可以在運(yùn)行cam()的時候,使得cam(0),和cam(1)的基本同時運(yùn)行
cam(i)

這個函數(shù)的主要功能就是圖像的運(yùn)動檢測,當(dāng)有運(yùn)動物體時,便會將圖片以“%Y%m%d%H%M%S’+’_’+str(0)”的格式記錄下來,有時候可能存在兩個攝像頭同時工作記錄,導(dǎo)致記錄下來的圖片日期一樣,為了避免這個Error產(chǎn)生,在日期的后面加上了攝像頭“i”的標(biāo)識,用來進(jìn)行分辨!
這里采用時間來控制camera.release(),當(dāng)運(yùn)行的時間==10s時候,便會退出cam(i),這個時間基本要和camrun()里的time.sleep()相同。
這里也做了一個異常處理。避免了因?yàn)閿z像頭沒有插好,或這因?yàn)榍耙粋€運(yùn)行的cam()還沒有結(jié)束釋放導(dǎo)致的camera busy等而造成運(yùn)行中斷!
checkcycle()
這個函數(shù)就是寫了一個無限循環(huán),可以讓getfilename()無限運(yùn)行,對新增的圖像文件及時的進(jìn)行檢測
testfacepp()
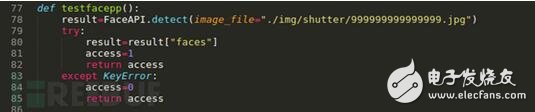
這個函數(shù)主要用來檢測訪問face++的服務(wù)器是否受到了 CONCURRENCY_LIMIT_EXCEEDED —并發(fā)限制,也就是說,因?yàn)槲覀兪敲赓M(fèi)用戶,雖然可以使用他的全部API ,但是,當(dāng)他們的服務(wù)器達(dá)到高負(fù)荷時候,要首先供付費(fèi)用戶的平穩(wěn)使用,當(dāng)負(fù)荷不大時候,我們才可以暢快的使用。還好吧!
getfilename()
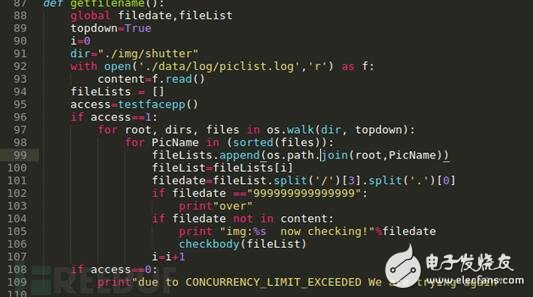
這個函數(shù)就是檢測新圖片的產(chǎn)生,首先,打開piclist.log文件,當(dāng)沒有受到并發(fā)限制的時候,然后再去運(yùn)用os,walk函數(shù)去遍歷”。/img/shutter/”目錄,這里要保證讀取時間的先后順序和寫入.log的先后順序同步,就不詳細(xì)說了。
當(dāng)檢測到的為事先預(yù)定“9999999999999”文件時候,就是表明這是所有文件都以寫入piclist.log并已檢測完畢,
當(dāng)所檢測的文件不在piclist.log的時候,便會調(diào)用checkbody(),來進(jìn)行身體的檢測,
checkbody()
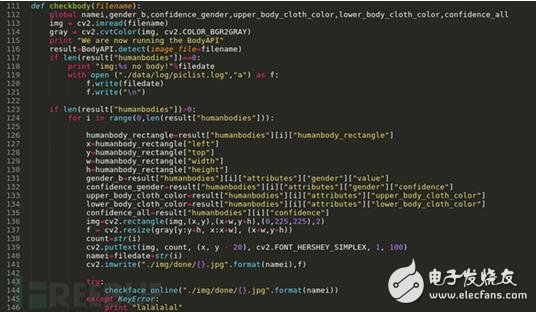
之所以先檢測身體,只有在有身體的情況下,才會有面部,可以減小服務(wù)器的負(fù)荷,
首先,讀取照片,然后傳入BodyAPI,進(jìn)行Body的檢測。當(dāng)不存在身體時候,將文件寫入piclist.log。進(jìn)行下一個文件的檢測
當(dāng)存在Body的時候,會將圖片中的每個Body都摳出來,然后分別放在”。/img/done/”里面,進(jìn)行下一步的面部識別,。
這里又對checkface_online()進(jìn)行了一個并發(fā)限制的異常處理,因?yàn)閷?shí)在沒法確定下一秒是否會并發(fā)限制,為了防止程序異常終端,所以在每次調(diào)用faceAPI的時候都要異常處理一下,目前BodyAPI并不會發(fā)生并發(fā)限制
detailface()
這個就是在運(yùn)行faceAPI的時候。將返回來的face_token與數(shù)據(jù)路中的人臉進(jìn)行比對,并返回該面部所對對應(yīng)的ID,namem,gender等信息
checkface_online()

面部識別這一塊有點(diǎn)長,不過也很簡單!
首先讀取”。/img/done/”下的文件,然后將其傳給FaceAPI()進(jìn)行面部分析,如果result_d[“faces”]==0,著表明只存在身體并未檢測到人臉,判定為stranger!寫入Piclist.log,進(jìn)行下一張圖像的檢測,當(dāng)result_d[“faces”]》0 時,才可以將面部返回的face_tokrn與之前導(dǎo)入的face_token進(jìn)行比對,同理,當(dāng)返回的len(result_s)==3及表明數(shù)據(jù)庫中并沒有該人臉,判定為 stranger!,寫入Piclist.log。當(dāng)len(result_s)》3時候,同時 confidence 》= 80.00才可以判定這個人是誰,否者都別判定為陌生人!
if __name__ == ‘__main__’:
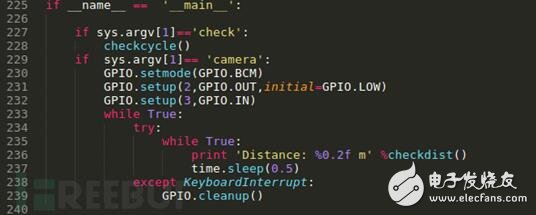
這里就是要運(yùn)行的方式
python MS.py check
這是就會開啟圖片檢測的功能。
python MS.py camera
這是就會開圖像截取的功能
2:BodyAPI,F(xiàn)aceAPI,import.py
PS:這些就詳細(xì)說了,因?yàn)橹鞍l(fā)表過一篇文章,大家可以去參考
0×05:運(yùn)行
代碼forkgithub.com/0x024/MS官方博客0x024.com
運(yùn)行前, 需要將。/facepp/FaceAPI.py和BodyAPI.py中的api_key和api_secret換成你的 (為了便于您測試,我以將我的key放在里面,為了防止多人使用沖突,希望您后期換成個人的) 需要將。/facepp/Dbconnect.py中的數(shù)據(jù)庫信息換成自己的 (在搭建環(huán)境過程中,建議密碼全部設(shè)置成ubuntu,方便記憶)
pythonimport.py#將。/data/master/目錄下的圖片特導(dǎo)入數(shù)據(jù)庫
pythonMS.py camera#運(yùn)行圖像捕捉
pythonMS.py check#運(yùn)行圖像檢測
0×06:其他
1:對于想用電腦進(jìn)行代碼測試的,我也將代碼整理好放MS-PC文件里面。大概運(yùn)行方式和在樹莓派上的差不多,只是少了超聲波傳感器這一環(huán)節(jié)!可自行調(diào)試。
2:對于環(huán)境搭建的問題,可以參考我先前的文章,實(shí)在不會的可在我的博客里面留言,我會及時的回復(fù),
3:對于想二次開發(fā)的。比如加上web服務(wù)器可以遠(yuǎn)程查看,加上通訊模塊及時進(jìn)行數(shù)據(jù)反饋等等,最重要的就是有大腦風(fēng)暴!
3:Good Luck










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論