
") 自動(dòng)駕駛的眼睛 細(xì)述單線激光雷達(dá)的作用
自動(dòng)駕駛的眼睛 細(xì)述單線激光雷達(dá)的作用
激光雷達(dá)的定義
激光雷達(dá)最早的定義是 LIDAR,英文為 Light Deteation and Ranging,中文意思是「光的探測(cè)和測(cè)距」。
其實(shí)更準(zhǔn)確的一個(gè)定義是 LADAR:LAser Detection and Ranging,即「激光的探測(cè)和測(cè)距」。這是在 2004 年提出的定義,更符合激光雷達(dá)的概念。
激光雷達(dá)實(shí)際上是一種工作在光學(xué)波段(特殊波段)的雷達(dá),它的優(yōu)點(diǎn)非常明顯:
1、具有極高的分辨率:激光雷達(dá)工作于光學(xué)波段,頻率比微波高2~3個(gè)數(shù)量級(jí)以上,因此,與微波雷達(dá)相比,激光雷達(dá)具有極高的距離分辨率、角分辨率和速度分辨率;
2、抗干擾能力強(qiáng):激光波長(zhǎng)短,可發(fā)射發(fā)散角非常小(μrad量級(jí))的激光束,多路徑效應(yīng)小(不會(huì)形成定向發(fā)射,與微波或者毫米波產(chǎn)生多路徑效應(yīng)),可探測(cè)低空/超低空目標(biāo);
3、獲取的信息量豐富:可直接獲取目標(biāo)的距離、角度、反射強(qiáng)度、速度等信息,生成目標(biāo)多維度圖像;
4、可全天時(shí)工作:激光主動(dòng)探測(cè),不依賴(lài)于外界光照條件或目標(biāo)本身的輻射特性。它只需發(fā)射自己的激光束,通過(guò)探測(cè)發(fā)射激光束的回波信號(hào)來(lái)獲取目標(biāo)信息。
但是激光雷達(dá)最大的缺點(diǎn)——容易受到大氣條件以及工作環(huán)境的煙塵的影響,要實(shí)現(xiàn)全天候的工作環(huán)境是非常困難的事情。
激光雷達(dá)分類(lèi)
激光雷達(dá)的分類(lèi),如果從體制上劃分,主要有直接探測(cè)激光雷達(dá)和相干探測(cè)激光雷達(dá)。實(shí)際上,目前我們提到的,包括自動(dòng)駕駛、機(jī)器人、測(cè)繪用到的激光雷達(dá),基本上屬于這種直接探測(cè)類(lèi)型的激光雷達(dá)。有比較特殊的,比如測(cè)風(fēng)、測(cè)速之類(lèi)的雷達(dá),一般會(huì)采用相干體制。
按應(yīng)用分類(lèi),我們可以分得更多,比如:激光測(cè)距儀、激光三維成像雷達(dá)、激光測(cè)速雷達(dá)、激光大氣探測(cè)雷達(dá),等等。
不管是單線激光雷達(dá)、多線激光雷達(dá)或測(cè)繪激光雷達(dá),我們基本上可以將其劃分到激光三維成像雷達(dá)的范疇。
一個(gè)激光三維成像雷達(dá),實(shí)際上它需要得到兩個(gè)核心信息:目標(biāo)距離信息以及目標(biāo)角度信息。
如果我們把它的三維坐標(biāo)準(zhǔn)確定下來(lái),我們需要得到它的距離、方位角、俯仰角信息。然后我們根據(jù)距離、方位角度、俯仰角度三個(gè)信息,將目標(biāo)的三維坐標(biāo)點(diǎn)計(jì)算出來(lái)。
一般而言,通過(guò)對(duì)編碼器進(jìn)行測(cè)量來(lái)獲取角度信息的技術(shù)很成熟。我們更關(guān)心的是,激光雷達(dá)的距離信息是怎么獲取的。
激光三維成像雷達(dá)可以通過(guò)直接測(cè)距、直接測(cè)角的技術(shù)得到目標(biāo)的三維點(diǎn)云數(shù)據(jù),并且獲得的數(shù)據(jù)本身就是三維數(shù)據(jù),不需要通過(guò)大量運(yùn)算和處理才生成目標(biāo)三維圖像,而且激光測(cè)距有非常高的精度。
所以,激光三維成像雷達(dá)是目前能獲取大范圍三維場(chǎng)景圖像效率最高的傳感器,也是目前能獲取三維場(chǎng)景精度最高的傳感器。
激光測(cè)距方法
目前,我們通常能見(jiàn)到的測(cè)距方法,從大類(lèi)上可以分為:激光飛行時(shí)間(Time of Fly,TOF)法以及三角法。
激光飛行時(shí)間法可以分為兩類(lèi),一類(lèi)是脈沖調(diào)制(脈沖測(cè)距技術(shù)),一類(lèi)是對(duì)激光連續(xù)波進(jìn)行強(qiáng)度的調(diào)制,通過(guò)相位差來(lái)測(cè)量距離信息的相位測(cè)距。
我們能在市面上見(jiàn)到的測(cè)距儀,或者說(shuō)單線、多線激光雷達(dá),基本上都是采用這三類(lèi)測(cè)距方法。
激光脈沖測(cè)距技術(shù)
激光脈沖測(cè)距技術(shù)的原理非常簡(jiǎn)單:通過(guò)測(cè)量激光脈沖在雷達(dá)和目標(biāo)之間來(lái)回飛行時(shí)間獲取目標(biāo)距離的信息。這里用了一個(gè)基準(zhǔn),就是光的速度。所有的測(cè)量都必須有一個(gè)基準(zhǔn),對(duì)于一束激光來(lái)說(shuō)有兩個(gè)基準(zhǔn):速度和頻率(兩個(gè)最準(zhǔn)的基準(zhǔn)),因?yàn)?TOF 用的基準(zhǔn)就是激光的飛行速度。
上述提到的三種測(cè)距方式,我認(rèn)為技術(shù)難點(diǎn)最大的是脈沖測(cè)距的方式。但它帶來(lái)的優(yōu)點(diǎn)非常明顯:測(cè)量速度非常快。由于通過(guò)高峰值的激光來(lái)進(jìn)行測(cè)量,其抗強(qiáng)光的干擾能力非常強(qiáng)。
缺點(diǎn)是測(cè)距分辨率提升難度高,探測(cè)電路難度大。舉個(gè)例子,如果要做到相位測(cè)距 1.5 個(gè)毫米的分辨率,我們就需要把計(jì)時(shí)時(shí)鐘分辨率做到 10 個(gè)皮秒,也就相當(dāng)于 100G 帶寬,這是一個(gè)非常難的技術(shù)。
激光相位測(cè)距
激光相位測(cè)距,比如說(shuō)常見(jiàn)的手持式激光測(cè)距儀,采用的就是相位測(cè)距的方式來(lái)實(shí)現(xiàn)。它主要通過(guò)測(cè)量被強(qiáng)度調(diào)制的連續(xù)波激光信號(hào)在雷達(dá)與目標(biāo)之間來(lái)回飛行產(chǎn)生的相位差獲得距離信息。
這種技術(shù)最大的優(yōu)點(diǎn):測(cè)距分辨率非常高,目前一般市面上的相位測(cè)距儀都可以達(dá)到毫米量級(jí)分辨率。
缺點(diǎn)是測(cè)量速度比脈沖測(cè)距慢,畢竟我們把一個(gè)相位差測(cè)準(zhǔn),至少要做上幾十甚至上百個(gè)周期,實(shí)際上就相當(dāng)于把它的測(cè)量時(shí)間變相拉長(zhǎng),那么它的測(cè)量速度相對(duì)來(lái)說(shuō)比較低。此外,它的測(cè)量精度比較容易受到目標(biāo)形狀運(yùn)動(dòng)影響。如果在測(cè)量的光斑里,兩個(gè)目標(biāo)一前一后,實(shí)際上它測(cè)出來(lái)的具體信息,是這兩個(gè)目標(biāo)距離的一個(gè)平均值,而不是前一個(gè)目標(biāo)信息或后一個(gè)目標(biāo)信息。
但在脈沖測(cè)距里,就很容易將這樣的信息分開(kāi)。比如,一個(gè)激光脈沖,如果我們能夠把脈沖寬度做到 10 個(gè)納秒,那么我們就可以把一個(gè)目標(biāo)前后相距三十厘米的目標(biāo),通過(guò)多次回波的方法將其區(qū)分出來(lái)。
這種方式在相位測(cè)距里就很難把它區(qū)分出來(lái)。因?yàn)樵跍y(cè)量過(guò)程中,它的時(shí)間會(huì)比較長(zhǎng),目標(biāo)運(yùn)動(dòng)帶進(jìn)來(lái)的距離信息,把它引入到測(cè)量值里,實(shí)際上它測(cè)的是一個(gè)平均距離信息,而不是實(shí)時(shí)信息。但是激光脈沖測(cè)距,實(shí)際上是當(dāng)前位置實(shí)時(shí)的信息。
這也是為什么車(chē)用或機(jī)器人用的激光雷達(dá)往往會(huì)采用激光脈沖的測(cè)距技術(shù),而不采用相位測(cè)距技術(shù)。
三角法測(cè)距
三角法測(cè)距就是通過(guò)測(cè)量激光照射點(diǎn)在相機(jī)中的成像位置獲得距離信息。三角法測(cè)距最大的有優(yōu)點(diǎn)就是技術(shù)難度低,成本也很低,在近距離測(cè)距精度也很高。比如工業(yè)用可以做到百微米測(cè)距精度。
但缺點(diǎn)是,它的精度會(huì)隨著距離的增加逐漸變差,基本上沒(méi)法與脈沖測(cè)距以及相位測(cè)距相比。
另外一點(diǎn),因?yàn)?CMOS 相機(jī)必須要用一個(gè)連續(xù)的激光同步進(jìn)行照明,它的平均功率相對(duì)來(lái)說(shuō)比較低,抗干擾能力會(huì)非常強(qiáng),這種測(cè)距方式一般適合室內(nèi)近距離工作,而不適合在戶外強(qiáng)光背景或者室內(nèi)強(qiáng)光背景下工作。
三角法測(cè)距比較適合用于機(jī)器人等對(duì)性能要求不高的場(chǎng)景。

從上圖我們可以看出,脈沖測(cè)距除了成本和技術(shù)難度比較大以外,它在其他各方面的性能都比較優(yōu)秀。當(dāng)然,它的測(cè)距精度會(huì)比相位測(cè)距精度略低一些。但是這種精度,按目前的技術(shù),我們基本上可以達(dá)到厘米量級(jí),甚至是幾個(gè)毫米量級(jí)的測(cè)距精度,基本上能滿足我們多場(chǎng)合的使用要求。
我們主要的方向就是用脈沖測(cè)距的方式來(lái)做單線雷達(dá),包括多線雷達(dá)。
什么是單線激光雷達(dá)
目前單線激光雷達(dá)產(chǎn)品,主要有 SICK 公司和 HOKUYO 公司。
單線激光雷達(dá),實(shí)際上是一個(gè)高同頻脈沖激光測(cè)距儀,加上一個(gè)一維旋轉(zhuǎn)掃描。單線激光雷達(dá)的特點(diǎn):
1、只有一路發(fā)射和一路接收,結(jié)構(gòu)相對(duì)簡(jiǎn)單,使用方便;
2、掃描速度高、角度分辨率高;
3、體積、重量和功耗低;
4、可靠性更高;
5、成本低;
單線激光雷達(dá)能干什么?
在自動(dòng)駕駛領(lǐng)域,我們基本上看到的都是多線激光雷達(dá),單線激光雷達(dá)到底能干什么?
如上圖,美國(guó) DARPA 自動(dòng)駕駛挑戰(zhàn)賽里的參賽車(chē),第一個(gè)是 2005 年斯坦福大學(xué)名字叫做 Stanly 的參賽車(chē),這是當(dāng)年獲得冠軍的參賽車(chē)。另一個(gè)是卡耐基梅隆大學(xué)的參賽車(chē)。
當(dāng)時(shí)他們用的基本上是 SICK 公司的單線激光雷達(dá)。特別是斯坦福大學(xué)的參賽車(chē),光是上方就裝了五個(gè)激光雷達(dá),我們可以認(rèn)為它是多線激光雷達(dá)的“鼻祖”,只不過(guò)它是用了五個(gè)單線激光雷達(dá)來(lái)實(shí)現(xiàn)多線激光雷達(dá)的功能。
2007 年 Velodyne 推出 64 線激光雷達(dá)以后,很多自動(dòng)駕駛車(chē)輛基本上采用了 Velodyne 的產(chǎn)品。但這是不是就是說(shuō)明,單線激光雷達(dá)在輔助或者自動(dòng)駕駛里沒(méi)有市場(chǎng)?
我認(rèn)為不是。因?yàn)閱尉€激光雷達(dá)有它的特點(diǎn),比如說(shuō),在高重復(fù)頻率、高角度分辨率上,多線激光雷達(dá)很難達(dá)到同樣的技術(shù)指標(biāo)。
在行人探測(cè)、障礙物探測(cè)(小目標(biāo)探測(cè))以及前方障礙物探測(cè)等方面上,單線激光比多線激光雷達(dá)有優(yōu)勢(shì)得多,因?yàn)閱尉€激光雷達(dá)的角分辨率可以做得比多線激光雷達(dá)高,這一點(diǎn)在探測(cè)小物體或者行人里非常有用。
這個(gè)技術(shù)在現(xiàn)在智能機(jī)器人、服務(wù)機(jī)器人上非常有用,而且目前這一塊也是比較熱的領(lǐng)域。
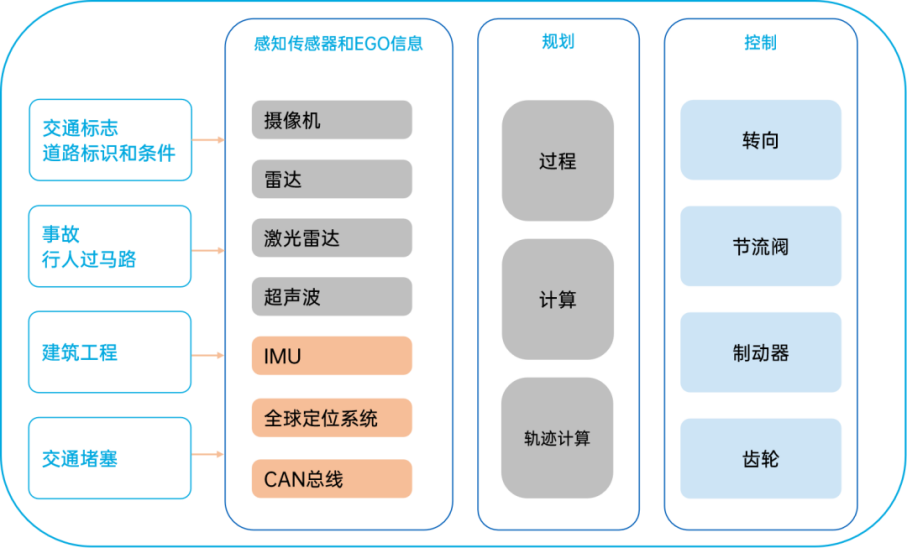
可能很多人會(huì)問(wèn)一個(gè)問(wèn)題,為什么要用激光雷達(dá)來(lái)做車(chē)道檢測(cè)而不用相機(jī),ADAS 算法不是非常成熟嗎,為什么非得用激光雷達(dá)?
這是因?yàn)橄鄼C(jī)特別容易受到背景光或者強(qiáng)光的干擾。比如,我們?cè)诹质a大道行走的時(shí)候,如果樹(shù)蔭落下斑斑點(diǎn)點(diǎn)的陽(yáng)光,再結(jié)合白色車(chē)道線,我們非常難把車(chē)道線識(shí)別出來(lái),而且識(shí)別概率在復(fù)雜的光照或者在強(qiáng)光照射條件下,它的識(shí)別概率非常非常低,算法也非常復(fù)雜。
那么,用激光雷達(dá)來(lái)做車(chē)道檢測(cè)有什么好處?第一,我們用的是紅外激光,這種激光本身在紅外波段的輻射比可見(jiàn)光要低得多。第二,我們會(huì)加一個(gè)非常窄的濾光片,把強(qiáng)背景光直接濾除。然后我們?cè)儆眉t外光對(duì)它進(jìn)行探測(cè)。這樣我們就能獲得一張非常高質(zhì)量的車(chē)道線圖像,通過(guò)圖像的灰度,就能非常容易把車(chē)道線檢測(cè)出來(lái)。換句話說(shuō),用激光雷達(dá)來(lái)做車(chē)道線檢測(cè),它的性能會(huì)比相機(jī)要高。
單線激光雷達(dá)在輔助駕駛里的應(yīng)用是行人探測(cè),實(shí)際上這也是一個(gè)前向防碰撞的應(yīng)用,與汽車(chē)防碰撞基本類(lèi)似。由于單線激光雷達(dá)的角分辨率可以做到比多線激光雷達(dá)高,可在更遠(yuǎn)的距離提前發(fā)現(xiàn)行人,為控制系統(tǒng)或駕駛員留出更多的預(yù)警時(shí)間。
ACC(Stop&Go)的應(yīng)用。這個(gè)功能在目前中國(guó)城市交通擁堵的情況下特別適用,它是通過(guò)前向激光雷達(dá)直接探測(cè)到前面的汽車(chē)運(yùn)動(dòng)來(lái)獲得前車(chē)的準(zhǔn)確距離信息,然后通過(guò)控制汽車(chē)自動(dòng)進(jìn)行跟隨。































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論