
") 百度Apollo 1.5 計(jì)劃單車(chē)道無(wú)人駕駛再度升級(jí)
百度Apollo 1.5 計(jì)劃單車(chē)道無(wú)人駕駛再度升級(jí)
自從百度發(fā)布Apollo 1.5 計(jì)劃后,自動(dòng)駕駛生態(tài)項(xiàng)目快速引起了國(guó)內(nèi)外的巨大反應(yīng),大量的數(shù)據(jù)表明Apollo 計(jì)劃新增了 6.5 萬(wàn)行開(kāi)源代碼,說(shuō)明百度對(duì)此舉是經(jīng)過(guò)了研討和審核,并不是臨時(shí)之舉。
為什么叫 Apollo 1.5?對(duì)這個(gè)項(xiàng)目有持續(xù)關(guān)注的同學(xué)應(yīng)該記得,在 7 月 5 號(hào)的發(fā)布會(huì)上,百度雖然展示了 Apollo 的技術(shù)全景,但是當(dāng)時(shí)他們開(kāi)放的其實(shí)是 Apollo 1.0 的版本,可以實(shí)現(xiàn)封閉場(chǎng)地的循跡自動(dòng)駕駛能力。而按照他們當(dāng)時(shí)給出的時(shí)間表,在 2017 年 9 月會(huì)開(kāi)放固定車(chē)道自動(dòng)駕駛的能力,到 2017 年 12 月,開(kāi)放簡(jiǎn)單城市路況自動(dòng)駕駛能力,也就是 Apollo 2.0。
這次他們開(kāi)發(fā)的 Apollo 1.5,實(shí)際上就是開(kāi)放了固定車(chē)道自動(dòng)駕駛能力。也就是說(shuō),在大家經(jīng)常提及的 1.0 及 2.0 版本之外,今天發(fā)布的 1.5 版本,其實(shí)原本就在百度的計(jì)劃之中,并不是一場(chǎng)「臨時(shí)起意」。
具體在技術(shù)層面開(kāi)放了什么呢?這時(shí)候又要搬出那張經(jīng)典的 Apollo 技術(shù)架構(gòu)圖了。
我們?cè)賮?lái)復(fù)習(xí)一下 1.0 和 2.0 版本的路線圖:
1.0,藍(lán)色框?yàn)殚_(kāi)放的能力:
2.0,相比 1.0 新增了紫色框的內(nèi)容:
而 Apollo 1.5 的路線圖是這樣的,其中黃色部分的內(nèi)容是這次所開(kāi)放的內(nèi)容:
可以看到,在開(kāi)源軟件平臺(tái)層面,這次開(kāi)放了地圖引擎(Map Engine)、感知(Perception)、規(guī)劃(Planning)、端到端深度學(xué)習(xí)(End-to-End)四個(gè)能力。而在云端服務(wù)平臺(tái)層面,這次開(kāi)放了高精度地圖(HD Map)、仿真模擬平臺(tái)(Simulation)兩部分。硬件方面,Apollo 開(kāi)放了對(duì)于激光雷達(dá)的支持。
把這些能力和 1.0 版本所開(kāi)發(fā)的能力相加,Apollo 1.5 所能實(shí)現(xiàn)的功能如前所說(shuō),就是「定車(chē)道晝夜自動(dòng)駕駛」,也就是說(shuō),如果你想基于 Apollo 開(kāi)源代碼做自動(dòng)駕駛,用了 1.5 版本的這套東西,可以讓你的車(chē)子實(shí)現(xiàn)單車(chē)道內(nèi)的自主駕駛和跟車(chē)功能。
允許我跳脫一下說(shuō)句題外話:百度這個(gè) Apollo 1.5 發(fā)布會(huì),做的相當(dāng)技術(shù)范兒,如果不是對(duì)于自動(dòng)駕駛技術(shù)有較深研究的記者,可能會(huì)聽(tīng)的很暈。當(dāng)然,發(fā)布會(huì)到場(chǎng)的不止媒體,合作伙伴和潛在合作伙伴聽(tīng)了這些,可能會(huì)很「享受」。
但是在這里還是有必要去分解一下技術(shù)層面的東西。
來(lái)看看這次 1.5 版本開(kāi)放的五大能力:障礙物感知、決策規(guī)劃、云端仿真、高精地圖服務(wù)、端到端的深度學(xué)習(xí)。
其中按照 Apollo 平臺(tái)研發(fā)負(fù)責(zé)人王京傲的說(shuō)法,前四個(gè)能力是「如期開(kāi)放」的,而在 Apollo 1.5 這個(gè)時(shí)間節(jié)點(diǎn)上開(kāi)放端到端的深度學(xué)習(xí)能力有點(diǎn)兒「意料之外」。
在我看來(lái),選擇開(kāi)放什么能力,是由每個(gè)階段的目標(biāo)所決定的。從 1.0 的封閉場(chǎng)地自動(dòng)循跡發(fā)展到 1.5 的定車(chē)道自動(dòng)駕駛,障礙物感知、決策規(guī)劃、仿真測(cè)試、高精地圖這幾項(xiàng)能力,其實(shí)是必須要開(kāi)放出來(lái)的,否則很難實(shí)現(xiàn) 1.5 的目標(biāo)。
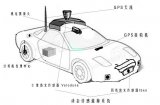
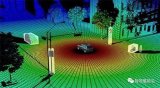
先說(shuō)障礙物感知。按照百度的說(shuō)法,這個(gè)能力是基于深度學(xué)習(xí)實(shí)現(xiàn)的。具體原理是,通過(guò)「參考硬件」Velodyne 的 64 線激光雷達(dá)采集周?chē)h(huán)境的點(diǎn)云數(shù)據(jù),然后使用英偉達(dá)的 GPU,通過(guò) CUDA、CuDNN、Caffe 技術(shù)實(shí)現(xiàn)對(duì)于障礙物的精準(zhǔn)識(shí)別。一方面,可以實(shí)現(xiàn)對(duì)障礙物的行為預(yù)測(cè),另一方面,為了適配不同的障礙物,Apollo 也會(huì)提供不同的算法。
這也解釋了為什么百度要在 Apollo 1.5 里開(kāi)放對(duì)于激光雷達(dá)的支持。
而作為百度投資的公司,Velodyne 今天也在現(xiàn)場(chǎng)發(fā)布了一個(gè)消息:他們正式在國(guó)內(nèi)上市 32 線激光雷達(dá)產(chǎn)品 VLP-32C(請(qǐng)記住,是 32C)。另外,對(duì)于 Apollo 生態(tài)成員,Velodyne 還會(huì)提供「特殊服務(wù)」:如果這些公司需要激光雷達(dá)裝在自己的自動(dòng)駕駛測(cè)試車(chē)上,Velodyne 會(huì)提供更短的交貨周期、專項(xiàng)技術(shù)支持,當(dāng)然還有「生態(tài)成員專屬價(jià)格」。
決策規(guī)劃:系統(tǒng)可以對(duì)無(wú)人車(chē)收集的數(shù)據(jù)進(jìn)行篩選聚合,在決策規(guī)劃這個(gè)模塊對(duì)這些數(shù)據(jù)進(jìn)行重構(gòu),基于此,運(yùn)用不同的優(yōu)化器,為無(wú)人車(chē)畫(huà)出最安全、最光滑的行車(chē)路徑。具體看圖吧,懂的同學(xué)自然懂:
端到端的深度學(xué)習(xí):既采用了卷積神經(jīng)網(wǎng)絡(luò),也采用了創(chuàng)新性的基于深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)。
高精度地圖:這是實(shí)現(xiàn)自動(dòng)駕駛的基礎(chǔ)之一,此前我們也專門(mén)用一篇文章介紹過(guò)百度高精度地圖的具體采集、制作過(guò)程。百度認(rèn)為他們的高精度地圖具備精細(xì)化程度高、生產(chǎn)效率高、覆蓋面廣這三個(gè)核心優(yōu)勢(shì)。
百度的目標(biāo)是到 2020 年,Apollo 高精度地圖將覆蓋全國(guó)所有高等級(jí)道路及重點(diǎn)城市道路,目前開(kāi)放的是全國(guó)范圍內(nèi)高速公路與特定城市道路的高精度地圖,精度在 15-20cm 的級(jí)別。
云端仿真:百度稱之為自動(dòng)駕駛的「加速器」。它的意義在于,不需要實(shí)際用自動(dòng)駕駛測(cè)試車(chē)上路實(shí)測(cè),在仿真平臺(tái)上就可以進(jìn)行「虛擬路試」,達(dá)到快速鍛煉算法以及積累數(shù)據(jù)的目的,節(jié)省成本,提升效率,快速迭代。
Apollo 仿真平臺(tái)的優(yōu)勢(shì)在于內(nèi)置高精地圖、擁有海量場(chǎng)景、有云端計(jì)算能力以及可以提供專業(yè)度量體系(度量體系也就是所謂的「裁判員」,用來(lái)評(píng)估測(cè)試的算法水平如何)。
按照百度給出的信息,Apollo 仿真平臺(tái)的虛擬運(yùn)算能力可以達(dá)到「日行百萬(wàn)公里」。
好了,以上就是對(duì)于這幾個(gè)新增開(kāi)放能力的介紹。說(shuō)實(shí)話,百度在發(fā)布會(huì)上給出的信息量要遠(yuǎn)大于我所寫(xiě)的,他們對(duì)每個(gè)能力的講解都非常詳細(xì)。如果你是自動(dòng)駕駛技術(shù)的開(kāi)發(fā)者,可以去 Apollo 的官網(wǎng)了解更多,如果你是吃瓜群眾,這部分有個(gè)基本了解就夠了。
當(dāng)然還有一種可能:作為吃瓜群眾,沒(méi)準(zhǔn)兒你看了這些東西,也想去 DIY 一個(gè)自動(dòng)駕駛車(chē)玩玩?
說(shuō)完了技術(shù),再來(lái)聊一些關(guān)于 Apollo 計(jì)劃更宏觀的東西。
「開(kāi)發(fā)者」這個(gè)詞,是百度方面反復(fù)提及的,作為一個(gè)開(kāi)放的自動(dòng)駕駛計(jì)劃,開(kāi)發(fā)者的重要性不言而喻,如果不好理解的話,可以參考安卓的例子。用百度的話術(shù)來(lái)說(shuō)就是:開(kāi)發(fā)者的成功,就是 Apollo 計(jì)劃的成功。
在發(fā)布會(huì)現(xiàn)場(chǎng),三個(gè)「開(kāi)發(fā)者」從不同的角度聊了聊自己的體會(huì),他們分別是金龍客車(chē)、Momenta 以及智行者科技這兩家創(chuàng)業(yè)公司。
金龍把一輛 6 米長(zhǎng)的巴士進(jìn)行了硬件改裝,灌入 Apollo 1.0 的代碼,在一周之內(nèi)讓車(chē)輛具備了封閉場(chǎng)地循跡能力。而這也標(biāo)志著 Apollo 的應(yīng)用從乘用車(chē)拓展到了商用車(chē)領(lǐng)域。
Momenta 和智行者提供了兩個(gè) Apollo 1.5 的應(yīng)用案例。
Momenta 的 CEO 曹旭東介紹說(shuō),他們基于 Apollo1.5 做的自動(dòng)駕駛測(cè)試車(chē),在白天和夜晚場(chǎng)景下可以完成對(duì)于前車(chē)突然并線、行人、自行車(chē)橫穿馬路等交通場(chǎng)景的精準(zhǔn)識(shí)別。而當(dāng)路上出現(xiàn)垃圾桶、大型犬及紙箱等非典型交通場(chǎng)景時(shí),車(chē)輛也能做出準(zhǔn)確判斷,提供安全穩(wěn)定的行車(chē)決策。Momenta和 Apollo 的合作主要是為了驗(yàn)證障礙物識(shí)別和激光雷達(dá)感知部分的能力。
至于智行者,他們和 Apollo 的合作主要基于高精度地圖和云端仿真。在北京某個(gè)公園目前已經(jīng)投入了一種「無(wú)人駕駛掃路機(jī)」,智行者為它提供了無(wú)人駕駛解決方案,而這其中就用到了 Apollo 的高精度地圖及定位服務(wù),實(shí)現(xiàn)了自動(dòng)避障、自主循跡、定點(diǎn)起停、自主掃地等功能。另外,智行者還利用了云端仿真平臺(tái)進(jìn)行自動(dòng)駕駛模擬測(cè)試。
據(jù)百度介紹,在經(jīng)過(guò)了兩個(gè)多月的發(fā)展之后,Apollo 生態(tài)目前的合作伙伴數(shù)量增加到 70 家左右。
至于整個(gè) Apollo 開(kāi)發(fā)者生態(tài)的構(gòu)成,可以用百度副總裁鄔學(xué)斌在現(xiàn)場(chǎng)展示的一張圖片說(shuō)明:
其實(shí)從 1.0 到 1.5 再到未來(lái)的 2.0,可以看出的是,百度很看重 Apollo 的迭代能力,做個(gè)可能不恰當(dāng)?shù)谋扔鳎@就有點(diǎn)兒像特斯拉的 OTA 遠(yuǎn)程更新。作為 Apollo 生態(tài)的合作伙伴,不斷地獲得自動(dòng)駕駛能力的更新,可能這也是一件有「生命力」的事兒。
而當(dāng)問(wèn)及 Apollo 到底如何贏利的時(shí)候,鄔學(xué)斌的回答簡(jiǎn)短但卻意味深長(zhǎng):不在現(xiàn)有價(jià)值鏈里淘金,而是從云端提供服務(wù)。



































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論