3 電路工作原理
目前,市場上絕大部分太陽能路燈都是通過防電流倒灌二極管將蓄電池與太陽能板直接相連以充電的。圖3 示出傳統的充電電路。

圖3 傳統的充電電路
這種做法的弊端是它將使太陽能板的輸出電壓Uarr 被蓄電池箝位在其電動勢12V 左右,也即其工作點被限制在圖2 的Q 點,這將使太陽能板的輸出功率Parr 大幅度降低。
在太陽能板與蓄電池組中加入DC/DC電路,通過對其進行控制,調節Uarr,從而使其穩定在圖2 的P 點,以便能有效利用太陽能板的可輸出功率。在標準測試條件下,太陽電池的最佳工作電壓與其開路電壓之間存在一個特定的比例關系,基于該思想產生了恒壓跟蹤MPPT策略,但在非標準條件下,其實用性較差。利用擾動開關管的工作占空比D,直至輸出功率Parr 達到最大的擾動觀察法,在尋找MPP 上更具通用性。
對于Buck 電路,存在UarrD=Ubat 關系,所以:

式中Ubat ---蓄電池電壓
式(1)代入得:

由圖2 可知,在MPP 時,dParr /dUarr=0,(d2Parr /dUarr2)《0,因此可由式(3)和式(4)化簡為:
因此,輸出功率和D 的關系與圖2 中的P 和U關系相似。從而可通過擾動D,實現輸出功率的變化,并尋找出MPP.由于輸出電壓即蓄電池的充電電壓短期內變化不大,在進行D 擾動尋找MPP 期間可近似認為恒定,因此輸出功率的大小直接反應在輸出電流即蓄電池的充電電流上,通過采樣該充電電流值,從而判斷出輸出功率隨D 擾動的變化情況,以便進行MPPT.為了提高控制精度和驅動能力,單片機與開關管間加入了D/A 轉換和PWM芯片,圖4 示出其主電路拓撲。
4 最大功率點追蹤(MPPT)
電路尋找MPP 的工作原理可簡述為:通過不斷改變開關管驅動信號的D,直至蓄電池的充電電流達到最大,此刻即可認為太陽電池的輸出功率達到最大,實現太陽電池的最大功率點追蹤。在尋找MPP 過程中,根據D 的擾動情況,輸出功率有3 類模式,對應9 種大小關系。
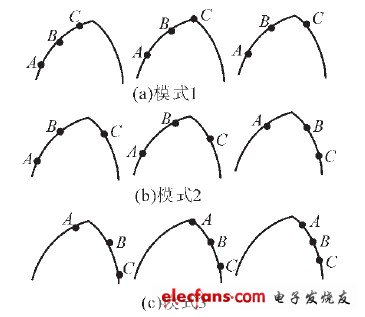
圖5 示出輸出功率隨D 擾動的變化情況
根據上述模式變化,擾動開關管的D,當檢測到當前輸出功率與D 的大小關系為模式2 時,即可認為已搜尋到MPP,同時將以該D 進行工作。
考慮到溫度及光照條件的改變,太陽電池的輸出參數不斷變化,同時導致MPP 的漂移,單片機在經過設定時間后,將再一次做D的擾動,搜尋新的MPP,以保證太陽電池的最大功率輸出,從而有效利用太陽能。
根據上述分析,編制了相關程序。圖6 示出其設計流程。
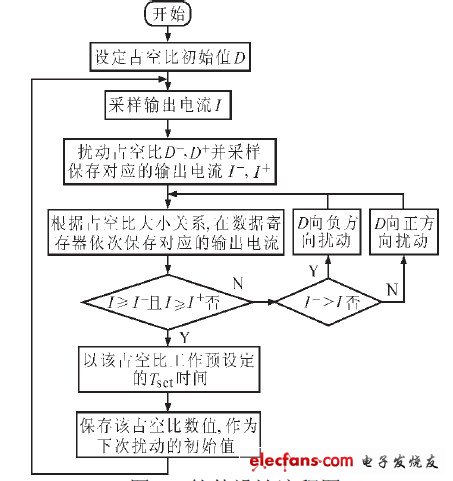
圖6 軟件設計流程圖
通過實驗發現,在晴日里不同時刻的MPP 處,電路工作的D 均變化不大。因此,為了避免搜尋過程中造成尋找時間太久及帶來的能量浪費,下一時刻進行MPP 追蹤的搜尋起點設定為上一次MPP 時的D 值。