前些時間,石頭發布了旗下兩款年度旗艦,石頭掃地機器人T7以及石頭掃地機器人T7 Pro,作為新一代的智能清潔工具。不過這一次,筆者要和大家分享的并不是它的清潔能力,而是它的越障脫困性能和背后的傳感器。
大多數家庭的房間中,或多或少都會存在落地電線、桌腳、床腳等各種障礙物。而掃地機器人必須通過底部的邊刷、輪子、吸塵口進行清掃工作。那么可能遇到的狀況就是——落地線纜有可能將設備纏住、被桌腳圍住……這就需要掃地機器人具備足夠的避障、脫困性能,才能順利執行清掃任務。
早期的石頭掃地機器人產品就已經具備了齊全的傳感器
我們可以把掃地機器人理解為一個帶輪子的迷你吸塵器,但帶輪子、能吸塵只是成為掃地機器人最基本的要素。要想其變得智能起來,具備足夠的避障、脫困性能,必須要有各種傳感器的加持。
以石頭掃地機器人T7 和T7 Pro為例,翻到機身底部其實可以看到,石頭掃地機器人T7系列的懸崖傳感器達到了6組,再配合雙電子羅盤傳感器、陀螺儀、加速計和跌落傳感器,清掃過程中的方向性和防跌落能力勢必會有所提高。
關于防跌落傳感器,它主要是進行測距。當石頭掃地機器人T7系列走到桌面邊緣時,防跌落傳感器測得掃地機器人與邊緣之間的距離,到達臨界值的時候石頭掃地機器人便進行轉向,改變前進方向來實現防跌落的效果。
除此之外,大多數掃地機器人身上還都有陀螺儀和加速度傳感器,陀螺儀來測角速度,用于判斷方向;加速度是測線性加速度的,用來判斷速度,通過兩者結合才能知道目前掃地機器人的運行狀態。
還一個比較重要的是輪速計,它能精確記錄輪子旋轉的圈數,乘以輪子的周長,從而計算掃地機器人在工作時行進的里程,保障掃地機器人能精準的計算出自己在室內的位置變化。
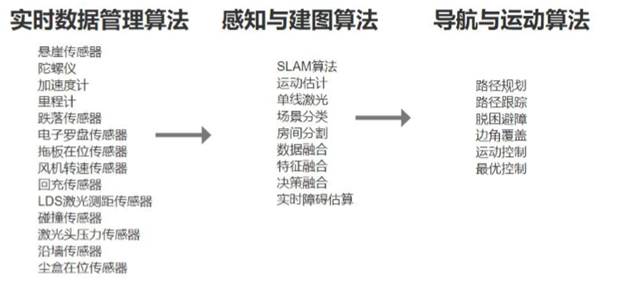
石頭掃地機器人T7系列的算法也需要借助傳感器來實現
值得一提的是,石頭掃地機器人T7 Pro的兩顆攝像頭目前只用來進行AI識別和遠程監控,本質上和石頭掃地機器人T7一樣,都要通過LDS激光測距。
LDS激光傳感器還夠以每秒多次的速度對周圍環境進行掃描,在檢測到不同時長、強弱的反射信號后,通過計算生成傳感器到物體的距離信息。并通過這些距離信息建立精準地圖,實現智能規劃清掃路徑。
此外,塵盒傳感器用來感應是否塵盒歸位,在塵盒歸位后,傳感器才會關閉,設備才可以正常工作,避免在不裝塵盒設備的情況下掃地機器人空轉,保護掃地機器人的核心風機不受損壞。而回充傳感器位于掃地機器人正前方,可以精準鎖定充電座指引信號,大幅度提升回充效率。
正是有了以上各種各樣傳感器的協同工作,掃地機器人才能做到像今天這般智能。