據麥姆斯咨詢報道,近日,受手指結構(嵌入肌肉中的剛性骨架)的啟發,廈門大學周偉教授、秦利鋒副教授和香港城市大學王鉆開教授等人開發了一種剛-柔混合觸覺傳感器(rigid-soft hybrid tactile sensor,RSHTS),其采用剛-柔混合力傳輸層與柔性基底相結合的結構,不僅大大增強了力傳輸性能,而且觸發了壓電感知層的d31工作模式,而不是傳統的d33模式,使其具有超高的靈敏度。此外,該傳感器能夠以高可靠性檢測多個力的方向,在機器人動態觸覺傳感方面顯示出巨大潛力。
?
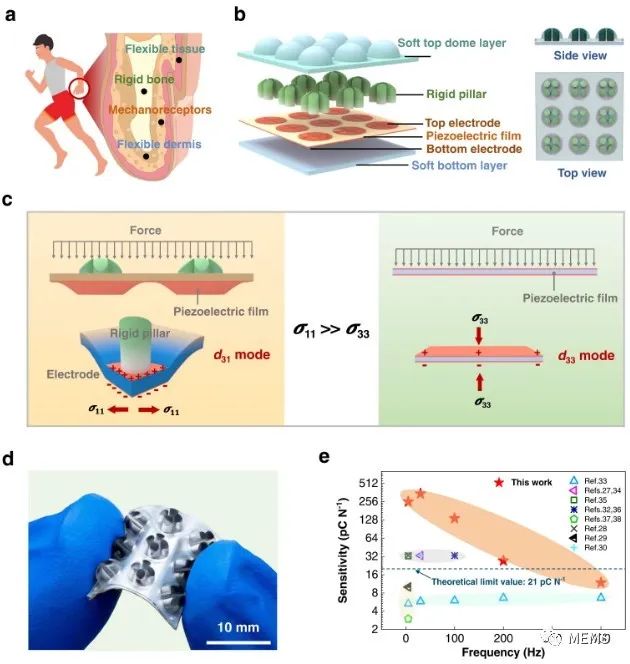
RSHTS的概念、結構和傳感性能
隨著機器人科學技術的飛速發展,越來越多的智能機器人被用來代替人類在極端或危險環境中執行任務。例如,在新冠肺炎(COVID-19)大流行期間,智能機器人被廣泛用于為被隔離人員運輸生活用品,這極大地避免了病毒的交叉感染和傳播。作為智能機器人不可或缺的組成部分,柔性觸覺傳感器在賦予機器人以類似人的觸覺感知進行抓取、握持和觸摸等高靈巧操作方面發揮著舉足輕重的作用。
這些類人傳感器可以檢測各種刺激的強度和模式,包括按壓、輕擊和滑動。而對于人類手指來說,這種能力主要歸功于四種功能性機械感受器(慢適應感受器I型、II型,即SA-I、II和快適應感受器I型、II型,即FA-I、II),它們分布在皮膚中,用于靜態力(<~5Hz)和動態力(5-400Hz)檢測。
為了實現智能機器人和可穿戴電子設備的機械力傳感感知,通常利用基于壓阻、電容、摩擦電和壓電機制的觸覺傳感器將觸覺信息轉換為電信號。其中,壓電柔性觸覺傳感器在動態力檢測方面具有快速響應的優點,因此被廣泛用于模擬人體皮膚中的FA-I、II,其形式通常采用由柔性基底和感知層組成的分層結構,其中柔性基底用于直接接觸刺激并將力從外部傳遞到內部感知層,或用于順應機器人身體的曲面以與環境交互。
然而,與使用硅、陶瓷和玻璃作為基底的基于剛性材料的觸覺傳感器相比,柔性觸覺傳感器的靈敏度和響應速度通常受到彈性基底的天然粘彈性的限制,因為它會吸收部分機械能。盡管人們一直致力于設計具有微結構的柔性基底,例如改善感知層的電性能,或者將感知層從2D改變為3D以提高靈敏度,但是壓電柔性觸覺傳感器的靈敏度仍然有限。此外,現有的壓電觸覺傳感器在d33模式下工作,這容易受到低于d33系數的理論靈敏度的影響。
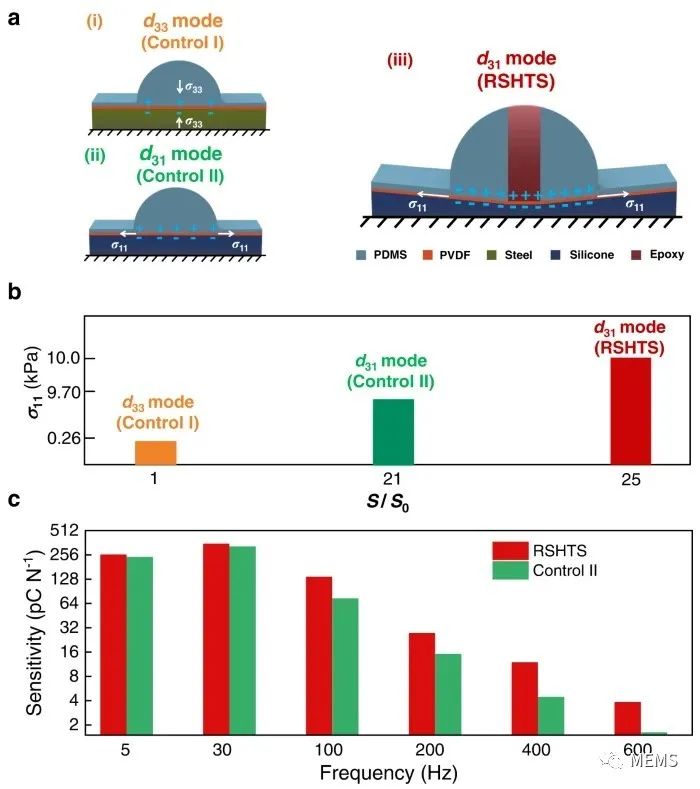
在本項研究中,受動物和人類手指結構的啟發,研究人員設計了一種具有三層結構(一層頂部圓頂層、一層感知層和一層底層)的超靈敏壓電觸覺傳感器,該傳感器采用剛-柔混合力傳輸層與柔性基底相結合的結構。研究結果表明,這種混合結構不僅顯著增強了高頻動態力的傳輸,而且在新的d31工作模式(而不是傳統的d33模式)下實現傳感,從而獲得超高的靈敏度。
因此,這種RSHTS具有346.5 pC?/N的超高靈敏度,約為d33模式下的理論極限靈敏度(21 ?pC/N)的17倍。此外,RSHTS還具有5-600?Hz寬帶寬和0.009-4.3 N的線性力檢測范圍。研究人員還證明了基于RSHTS的機械手可以實現多個力方向的實時檢測。
?
RSHTS應力分析的結構設計思路和數值模擬
歸功于頂層的圓頂設計和感知層中圖案化的電極,RSHTS可以通過分析四個壓電電容器的輸出來檢測多個力的方向。具有一個感知單元的RSHTS陣列可以區分±X、±Y和±Z軸上施加的力的方向。此外,RSHTS可以清楚地識別高頻振動,顯示了動態力檢測的優勢。基于RSHTS的機械手用于檢測沖擊力并模擬倒水過程,這表明RSHTS在幫助機器人實現高靈巧操作方面的巨大潛力。
研究人員所提出的傳感器有望應用于可穿戴電子設備,以實現對外部刺激的長期監測,從而建立機器人的類人觸覺系統,恢復殘疾人或老年人的觸覺感知能力等。
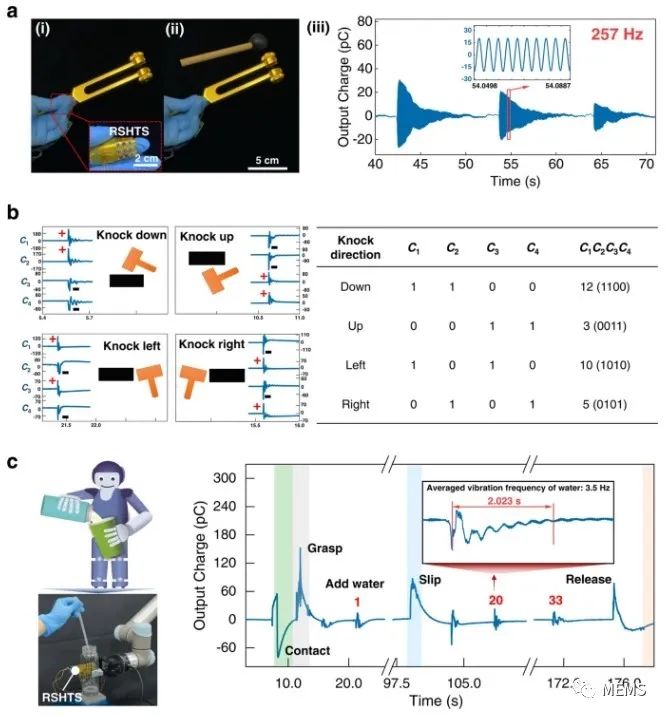
RSHTS的高頻刺激檢測和基于RSHTS的機械手用于檢測沖擊力,并模擬機器人倒水。
審核編輯:劉清