?01?
技術(shù)指標(biāo)解讀
以 ICM40607 規(guī)格書中的 SPECIFICATIONS 為例說明。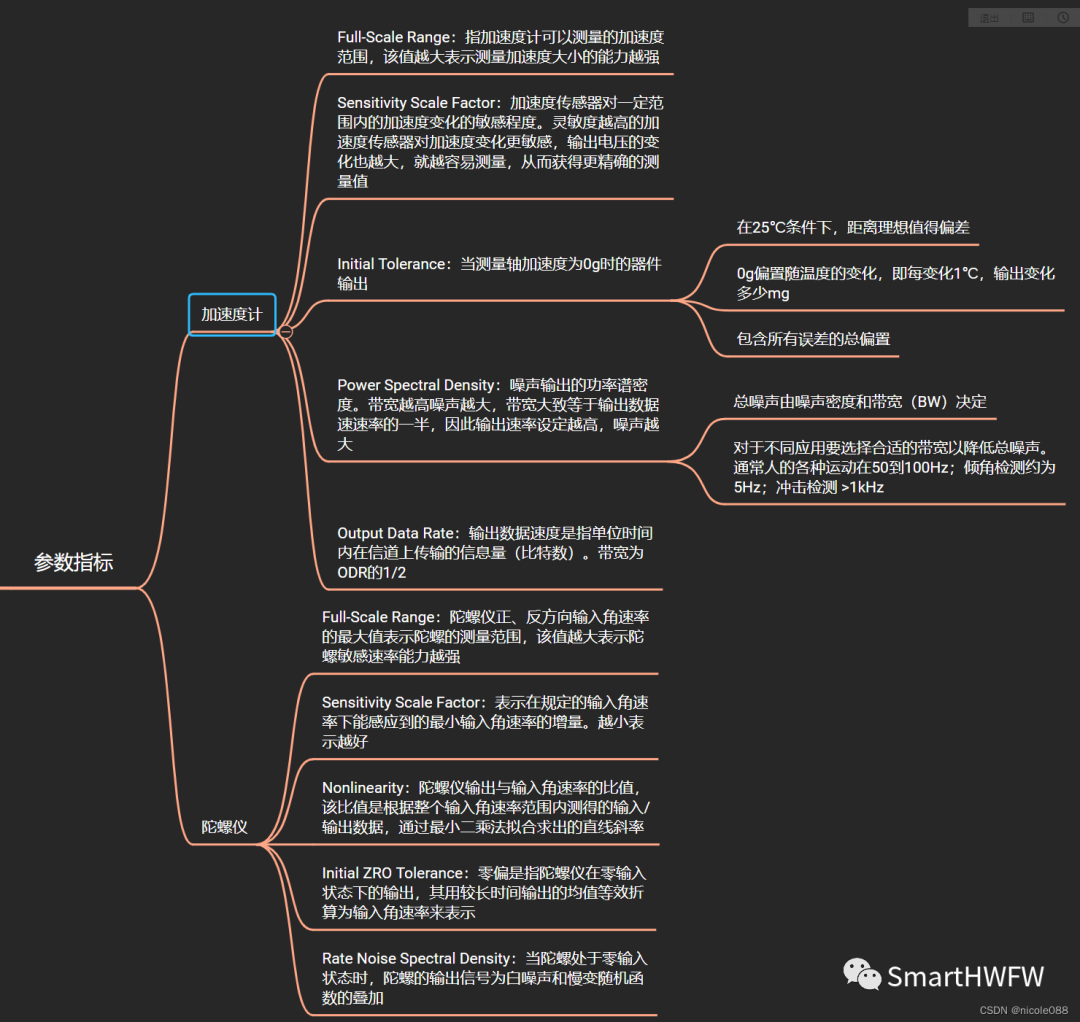
除了以上,在不同的應(yīng)用場景下,有可能考慮到以下兩個(gè)參數(shù)
振動(dòng)整流誤差(Vibration Rectification ):是指陀螺/加速度計(jì)在直線振動(dòng)或角振動(dòng)的條件下,陀螺/加速度計(jì)輸出信號中出現(xiàn)虛假的直流分量。這種虛假輸出會(huì)引起零點(diǎn)漂移和標(biāo)度因數(shù)改變,而這兩個(gè)關(guān)鍵參數(shù)的變化將引起整個(gè)慣性系統(tǒng)的測量誤差。?振動(dòng)整流誤差值越小,陀螺儀/加速度計(jì)輸出越穩(wěn)定。
振動(dòng)整流誤差 = 有振動(dòng)下平均輸出 - 無振動(dòng)下的平均輸出。 選用低振動(dòng)整流誤差的產(chǎn)品,可以在一定程度上降低載體對于減震措施的依賴程度,從而提高載體使用壽命以及導(dǎo)航精準(zhǔn)度。 ?
重現(xiàn)性 (Repeatability):?在出產(chǎn)時(shí)很容易將陀螺 Bias 校準(zhǔn)到 0,但是隨著使用時(shí)間的變化、溫度的變化 Bias 也會(huì)發(fā)生變化。在一些沒有辦法開關(guān)機(jī)校準(zhǔn)的產(chǎn)品上,特別注意這個(gè)參數(shù) ?
?02?
重要誤差介紹?
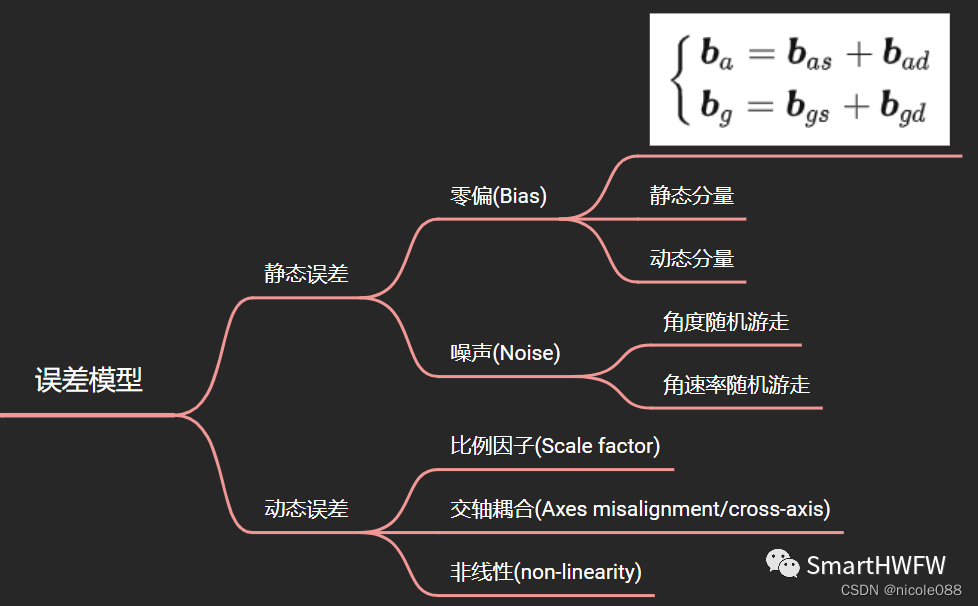
零偏(bias)
理論上在靜止?fàn)顟B(tài)下三軸輸出為0,0,0,但實(shí)際上輸出有一個(gè)小的偏置,這是零偏的靜態(tài)分量(也稱固定零偏)。當(dāng)然存在零偏的動(dòng)態(tài)分量,動(dòng)態(tài) bias 不是一個(gè)參數(shù),它會(huì)在一定范圍內(nèi)緩慢隨機(jī)飄移。 ?
噪聲(noise: angle random walk/velocity random walk)
可以簡單理解為 高斯白噪聲,(白噪聲是一種頻率遠(yuǎn)高于傳感器采樣頻率的高頻誤差,是信號的隨機(jī)波動(dòng))
白噪聲給陀螺儀帶來的誤差稱為Angular random walk(ARW), 誤差單位:rad/s/sqrt(Hz), deg/s/sqrt(Hz), deg/sqrt(hr)。?
假設(shè)某器件的ARW為0.12 deg/sqrt(hr),可簡單理解為在1小時(shí)內(nèi),由ARW造成正負(fù)0.12°的誤差。
給加速度計(jì)帶來的誤差稱為Velocity random walk(VRW),誤差單位:m/s2/sqrt(Hz), m/s/sqrt(h), mGal/sqrt(Hz)。 ?
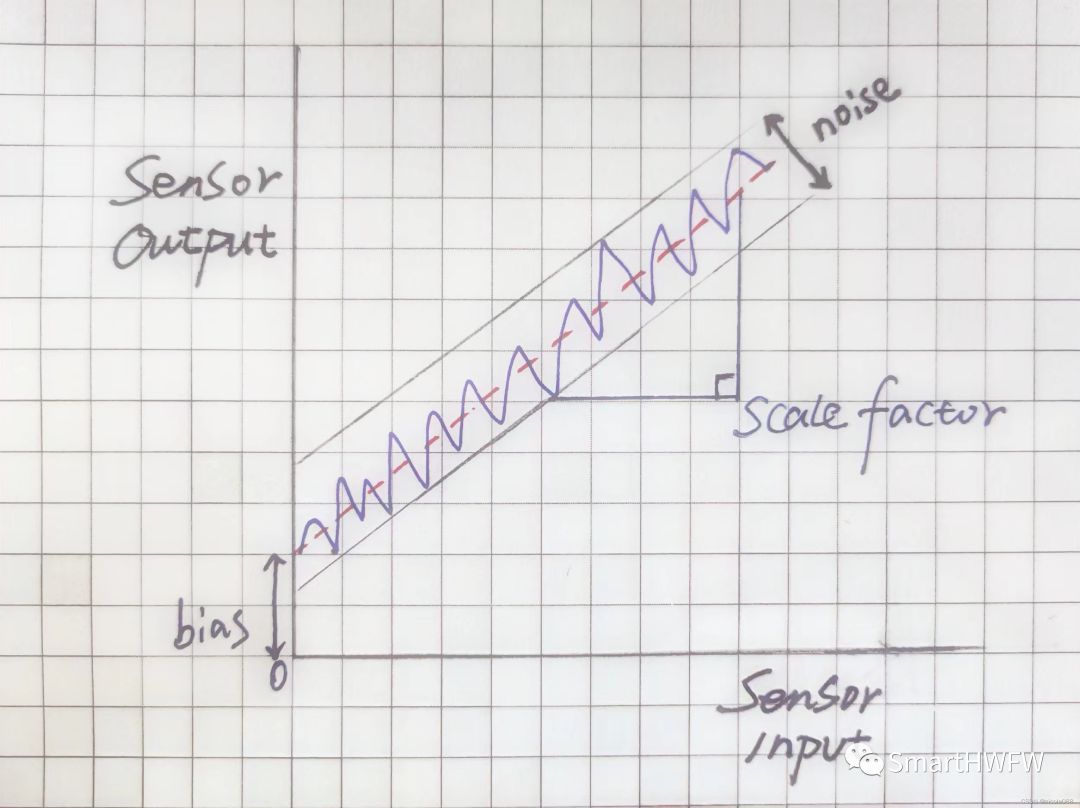
比例因子(scale factor)
刻度誤差, 輸出被測量的信號/輸入物理量 ?
交軸
每個(gè)軸的輸出受到其它兩個(gè)軸的輸入的影響 ?
非線性
由比例因子非線性導(dǎo)致的輸出誤差 ?
零偏穩(wěn)定性(準(zhǔn)確講應(yīng)該是零偏不穩(wěn)定性)
在固定條件(通常為恒溫)下,在指定的時(shí)間段內(nèi)傳感器的零偏發(fā)生的變化。
可以把它理解為零偏隨時(shí)間的緩慢變化,假設(shè)在剛開始時(shí)零偏大小是某個(gè)值,那么過一段時(shí)間之后,零偏便發(fā)生了變化,具體變化成了多少,無法預(yù)估,所以就要給他一個(gè)概率區(qū)間,來描述它有多大的可能性落在這個(gè)區(qū)間內(nèi),時(shí)間越長,區(qū)間越大。 ?
03?
深入理解白噪聲
3.1 角度隨機(jī)游走
對角速率做積分,必然也對噪聲也做了積分。白噪聲的積分并不是白噪聲,而是一個(gè)?馬爾可夫過程,即當(dāng)前時(shí)刻的誤差是在上一時(shí)刻誤差的基礎(chǔ)上累加一個(gè)隨機(jī)白噪聲得到的。
角度誤差中所含的馬爾可夫性質(zhì)的誤差,稱為角度隨機(jī)游走。
注意:既然是噪聲的指標(biāo),那么就是統(tǒng)計(jì)學(xué)指標(biāo),是隨機(jī)變量,這種噪聲既不能出廠前校準(zhǔn)也不能被補(bǔ)償。 ?
3.2 角速率隨機(jī)游走
對角加速度噪聲積分
角速率誤差中所含的馬爾可夫性質(zhì)的誤差,稱為角速率隨機(jī)游走。 ?
3.3 馬爾可夫
馬爾可夫推導(dǎo)引出功率譜密度的概念。
下面直接得出馬爾可夫性質(zhì):
馬爾可夫性質(zhì)的誤差是由寬帶角加速率白噪聲累積的結(jié)果
功率譜密度(PSD)的單位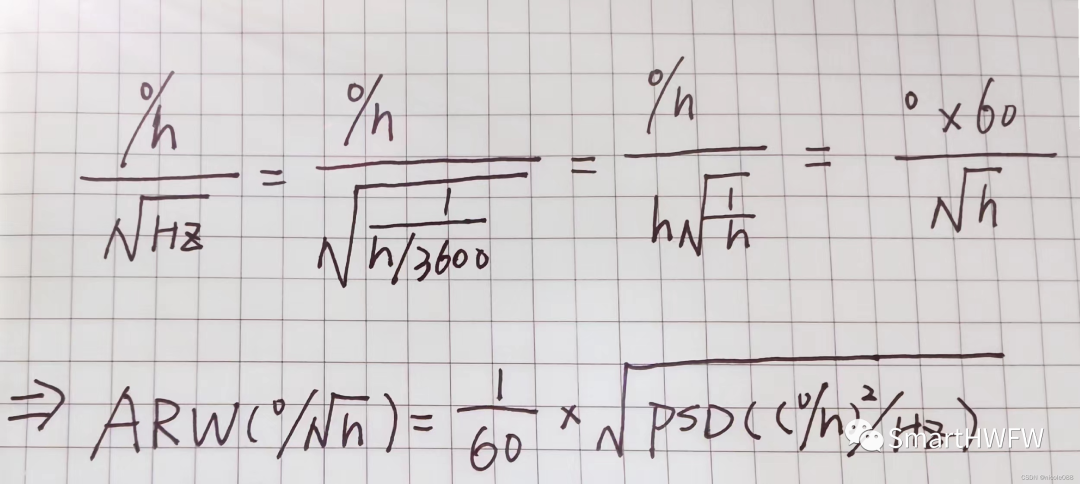
陀螺白噪聲與角度隨機(jī)游走的關(guān)系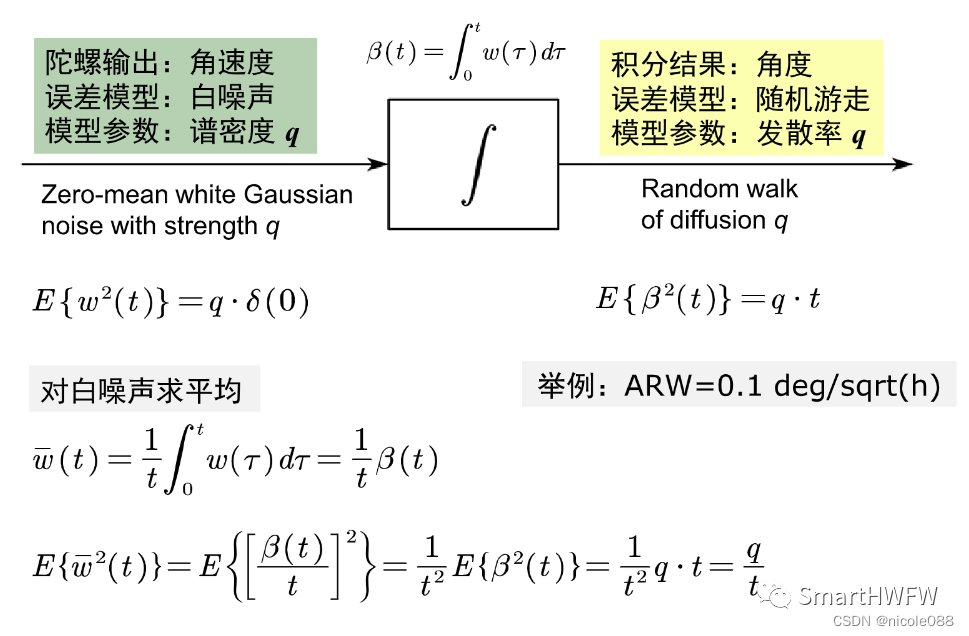
審核編輯:劉清