 電子發燒友App
電子發燒友App


TOP1 無人機遙感控制平臺電路
無人機相比較衛星和載人航空飛機遙感平臺而言,具有成本低、靈活性高的特點。為了滿足科學遙感實驗、完成遙感作業任務、協調無人機電子吊艙中多組件工作、控制遙感影像傳感器姿態,系統以AT89S52為主控芯片,擴展多路串口及USB接口以實現系統與外圍設備的通信,同時設計了相機驅動模塊及三自由度步進電機驅動模塊。通過無人機航空遙感實驗證明該系統能夠滿足遙感實驗要求。
USB接口擴展電路設計
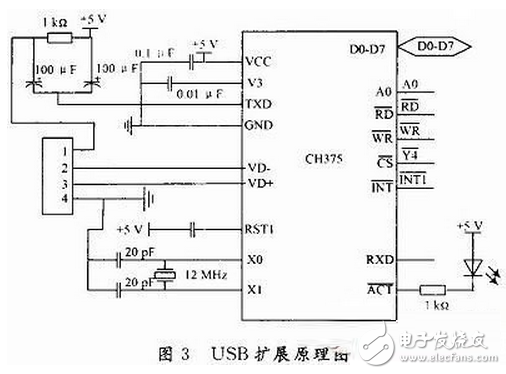
USB口擴展由CH375芯片實現。CH375是USB總線的通用接口芯片。它的主要特點是價格便宜、接口方便、可靠性高。支持 USB-HOST主機方式和USB-DEVICE/SLAVE設備方式。CH375的USB主機方式支持常用的USB全速設備,外部單片機需要編寫固件程序按照相應的USB協議與USB設備通信。但是對于常用的USB存儲設備,CH375的內置固件可以自動處理Mass-Storage海量存儲設備的專用通信協議,通常情況下,外部單片機不需要編寫固件程序.就可以直接讀寫USB存儲設備中的數據。CH375和單片機的通信有2種方式:并行方式和串行方式。USB擴展電路原理圖如圖3所示,CH375芯片設置為內置固件模式,使用12 MHz晶體。單片機P0口與CH375的D0~D7相連作為數據總線,譯碼器輸出CH375的相連片選該芯片,單片機A0與CH375的A0相連,可選擇 CH375的地址或是數據輸入與輸出。當A0為高電平是D0~D7的傳輸的是地址,低電平時傳輸的是數據。P3.6和P3.7分別控制CH375的讀寫操作。CH375接單片機輸入端,當有數據通過USB口輸入時產生中斷信號,通知單片機進行數據處理。當CH375芯片初始化后并成功與主機連通之后,指示燈亮。
步進電機驅動電路
穩定云臺控制即為三自由度步進電機控制,即控制遙感傳感器的俯仰角、橫滾角和航向角使穩定云臺保持水平(或垂直)狀態。步進電機驅動由THB6128芯片實現,單片機只需輸出步進電機運行方向和脈沖信號即可達到控制步進電機的目的。
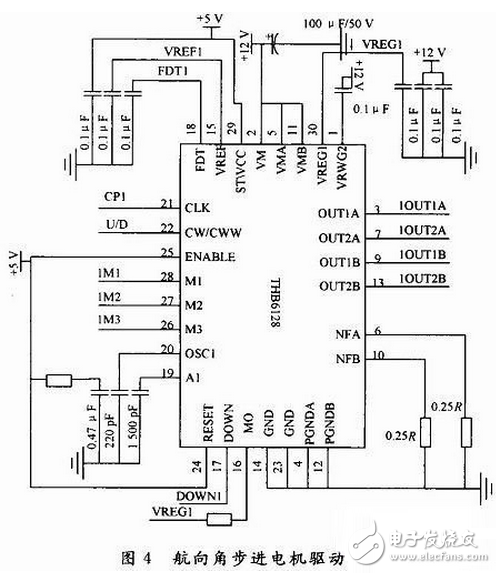
THB6128是高細分兩相混合式步進電機驅動專用芯片,通過單片機輸出控制信號,即可設計出高性能、多細分的驅動電路。其特點為雙全橋 MOSFET驅動,低導通電阻Ron=0.55 Ω,最高耐壓36 V,大電流2.2 A(峰值),多種細分可選,最高可達128細分,具有自動半流鎖定功能,快衰、慢衰、混合式衰減3種衰減方式可選,內置溫度保護及過流保護。圖4為航向角步進電機驅動電路,俯仰角、橫滾角步進電機驅動與之相同。圖中CP1與U/D分別為單片機給出的驅動脈沖與電機運行方向控制信號。M1,M2,M3為電機驅動細分數選擇信號輸入,由撥碼開關人為控制。FDT1與VREG1分別為衰減模式選擇電壓與電流控制電壓輸入端。當3.5 V時為慢衰減模式;當為混合衰減模式;當FDT1《0.8 V時為快衰減模式。調整VREG1端電壓即可設定步進電機驅動電流值。
CCD/相機驅動電路設計
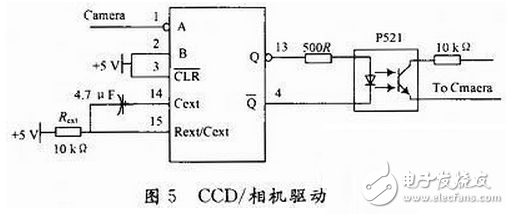
CCD/相機驅動由單穩態觸發器74LS221和光耦合器P521實現。74LS221既可以下降沿觸發也可上升沿觸發,且都可以禁止輸出。其輸出的脈寬通過內部補償獲得而不受外部電壓和穩定影響,在大多數應用中,脈寬只由外接的時控元件決定。CCD/相機驅動電路如圖5所示。圖示參數的單穩態觸發器高電平持續時間約為33 ms,可根據相機的實際曝光時間的需要,改變電路的充電時間常數RC來調節穩態時間的長短。圖中Camera為單片機P3.5口,當其為下降沿時,觸發單穩態觸發器輸出高電平,此高電平作用于光耦合器P521的二極管端,從而觸發三極管端導通,進而觸發相機快門。P521的輸出端串接一個10kΩ的電阻,防止導通時電流過大而損壞相機。
數據存儲模塊由AT24C512實現,單片機P3.0,P3.1口分別與AT24C512的SCL、SDL端口相連,并接入上拉電阻,模擬 I2C總線擴展 64 KB E2PROM數據存儲器。SRAM擴展由IDT6116SA芯片實現,擴展2 KB用于緩存單片機計算過程中的臨時數據。系統輸入電壓為12 V直流電,電源模塊采用7805與7805兩片三端穩壓器串接,降低單片穩壓器兩端的壓降,獲得平穩的+5 V電壓。|
通過實驗證明本系統可以較好的滿足無人機航空遙感平臺機載作業控制的要求,可以協調電子吊艙的各個組件工作,控制相機的姿態,實時下傳機載作業數據,使用的I/O口較少,USB接口的擴展解決了當前許多筆記本電腦不具備COM口的問題,在野外實驗時亦可及時的處理作業系統中的照片信息數據。單片機仍還有較多的資源可以利用,可方便系統的升級,但同時也受到微處理器數據處理能力的限制。
線下活動提醒:【嵌入式應用技術沙龍】以火爆無人機為引,深窺嵌入式應用在四軸無人機電機控制中的技術要領。










 工商網監
工商網監
評論