 電子發(fā)燒友App
電子發(fā)燒友App


TOP5 無(wú)人機(jī)技術(shù)各模塊詳解與技術(shù)分析
如今無(wú)人機(jī)成為了展會(huì)最大的熱點(diǎn)之一,大疆(DJI)、Parrot、3D Robotics、AirDog等知名無(wú)人機(jī)公司都有展示他們的最新產(chǎn)品。甚至是英特爾、高通的展位上展出了通信功能強(qiáng)大、能夠自動(dòng)避開(kāi)障礙物的飛行器。無(wú)人機(jī)在2015年已經(jīng)迅速地成為現(xiàn)象級(jí)的熱門(mén)產(chǎn)品,甚至我們之前都沒(méi)有來(lái)得及細(xì)細(xì)研究它。與固定翼無(wú)人機(jī)相比,多軸飛行器的飛行更加穩(wěn)定,能在空中懸停。主機(jī)的硬件結(jié)構(gòu)及標(biāo)準(zhǔn)的遙控器的結(jié)構(gòu)圖如下圖。

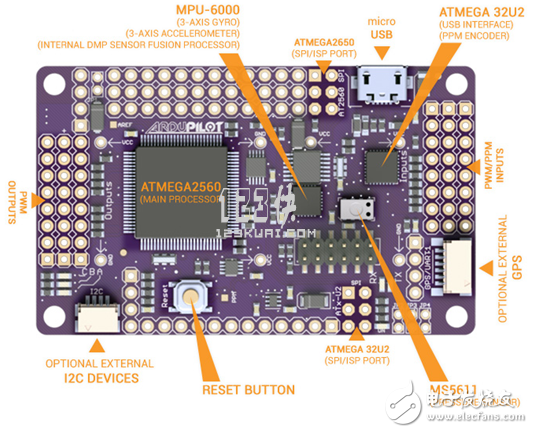
四軸飛行器系統(tǒng)解析圖
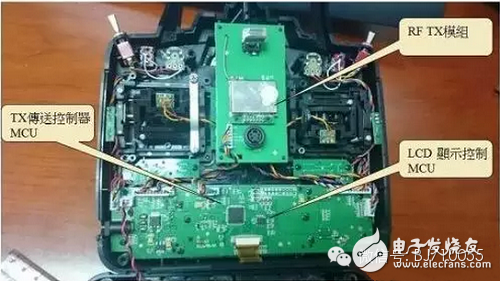
遙控器系統(tǒng)解析圖
以上只是標(biāo)準(zhǔn)產(chǎn)品的解剖圖,有些更加高級(jí)的如針對(duì)航模發(fā)燒友和航拍用戶(hù)們的無(wú)人機(jī)系統(tǒng),還會(huì)要求有云臺(tái)、攝像頭、視頻傳輸系統(tǒng)以及視頻接收等更多模塊。
飛控的大腦:微控制器
在四軸飛行器的飛控主板上,需要用到的芯片并不多。目前的玩具級(jí)飛行器還只是簡(jiǎn)單地在空中飛行或停留,只要能夠接收到遙控器發(fā)送過(guò)來(lái)的指令,控制四個(gè)馬達(dá)帶動(dòng)槳翼,基本上就可以實(shí)現(xiàn)飛行或懸停的功能。意法半導(dǎo)體高級(jí)市場(chǎng)工程師介紹,無(wú)人機(jī)/多軸飛行器主要部件包括飛行控制以及遙控器兩部分。其中飛行控制包括電調(diào)/馬達(dá)控制、飛機(jī)姿態(tài)控制以及云臺(tái)控制等。目前主流的電調(diào)控制方式主要分成BLDC方波控制以及FOC正弦波控制。
高通和英特爾推的飛控主芯片
CES上我們看到了高通和英特爾展示了功能更為豐富的多軸飛行器,他們采用了比微控制器(MCU)更為強(qiáng)大的CPU或是ARM Cortex-A系列處理器作為飛控主芯片。例如,高通CES上展示的Snapdragon Cargo無(wú)人機(jī)是基于高通Snapdragon芯片開(kāi)發(fā)出來(lái)的飛行控制器,它有無(wú)線通信、傳感器集成和空間定位等功能。Intel CEO Brian Krzanich也親自在CES上演示了他們的無(wú)人機(jī)。這款無(wú)人機(jī)采用了“RealSense”技術(shù),能夠建起3D地圖和感知周?chē)h(huán)境,它可以像一只蝙蝠一樣飛行,能主動(dòng)避免障礙物。英特爾的無(wú)人機(jī)是與一家德國(guó)工業(yè)無(wú)人機(jī)廠商Ascending Technologies合作開(kāi)發(fā),內(nèi)置了高達(dá)6個(gè)英特爾的“RealSense”3D攝像頭,以及采用了四核的英特爾凌動(dòng)(Atom)處理器的PCI- express定制卡,來(lái)處理距離遠(yuǎn)近與傳感器的實(shí)時(shí)信息,以及如何避免近距離的障礙物。這兩家公司在CES展示如此強(qiáng)大功能的無(wú)人機(jī),一是看好無(wú)人機(jī)的市場(chǎng),二是美國(guó)即將推出相關(guān)法規(guī),對(duì)無(wú)人機(jī)的飛行將有嚴(yán)格的管控。
Paul Neil說(shuō):xCORE多核微控制器擁有數(shù)量在8到32個(gè)之間的、頻率高達(dá)500MHz 的32位RISC內(nèi)核。xCORE 器件也帶有Hardware Response I/O接口,它們可提供卓越的硬件實(shí)時(shí)I/O性能,同時(shí)伴隨很低的延遲。“這種多核解決方案支持完全獨(dú)立地執(zhí)行系統(tǒng)控制與通信任務(wù),不產(chǎn)生任何實(shí)時(shí)操作系統(tǒng)(RTOS)開(kāi)銷(xiāo)。xCORE微控制器的硬件實(shí)時(shí)性能使得我們的客戶(hù)能夠?qū)崿F(xiàn)非常精確的控制算法,同時(shí)在系統(tǒng)內(nèi)無(wú)抖動(dòng)。xCORE多核微控制器的這些優(yōu)點(diǎn),正是吸引諸如無(wú)人機(jī)/多軸飛行器這樣的高可靠性、高實(shí)時(shí)性應(yīng)用用戶(hù)的關(guān)鍵之處。”多軸飛行器需要用到四至六顆無(wú)刷電機(jī)(馬達(dá)),用來(lái)驅(qū)動(dòng)無(wú)人機(jī)的旋翼。而馬達(dá)驅(qū)動(dòng)控制器就是用來(lái)控制無(wú)人機(jī)的速度與方向。原則上一顆馬達(dá)需要配置一顆8位MCU來(lái)做控制,但也有一顆MCU控制多個(gè)BLDC馬達(dá)的方案。
多軸無(wú)人機(jī)的EMS/傳感器
于用 MEMS傳感器測(cè)量角度變化,一般要選擇組合傳感器,既不能單純依賴(lài)加速度計(jì),也不能單純依賴(lài)陀螺儀,這是因?yàn)槊糠N傳感器都有一定的局限性。比如說(shuō)陀螺儀輸出的是角速度,要通過(guò)積分才能獲得角度,但是即使在零輸入狀態(tài)時(shí),陀螺依然是有輸出的,它的輸出是白噪聲和慢變隨機(jī)函數(shù)的疊加,受此影響,在積分的過(guò)程中,必然會(huì)引進(jìn)累計(jì)誤差,積分時(shí)間越長(zhǎng),誤差就越大。這就需要加速度計(jì)來(lái)校正陀螺儀,因?yàn)榧铀俣扔?jì)可以利用力的分解原理,通過(guò)重力加速度在不同軸向上的分量來(lái)判斷傾角。由于沒(méi)有積分誤差,所以加速度計(jì)在相對(duì)靜止的條件下可以校正陀螺儀的誤差。但在運(yùn)動(dòng)狀態(tài)下,加速度計(jì)輸出的可信度就要下降,因?yàn)樗鼫y(cè)量的是重力和外力的合力。較常見(jiàn)的算法就是利用互補(bǔ)濾波,結(jié)合加速度計(jì)和陀螺儀的輸出來(lái)算出角度變化。
ADI亞太區(qū)微機(jī)電產(chǎn)品市場(chǎng)和應(yīng)用經(jīng)理表示,ADI產(chǎn)品主要的優(yōu)勢(shì)就是在各種惡劣條件下,均可獲得高精度的輸出。以陀螺儀為例,它的理想輸出是只響應(yīng)角速度變化,但實(shí)際上受設(shè)計(jì)和工藝的限制,陀螺對(duì)加速度也是敏感的,就是我們?cè)谕勇輧x數(shù)據(jù)手冊(cè)上常見(jiàn)的deg/sec /g的指標(biāo)。對(duì)于多軸飛行器的應(yīng)用來(lái)說(shuō),這個(gè)指標(biāo)尤為重要,因?yàn)轱w行器中的馬達(dá)一般會(huì)帶來(lái)較強(qiáng)烈的振動(dòng),一旦減震控制不好,就會(huì)在飛行過(guò)程中產(chǎn)生很大的加速度,那勢(shì)必會(huì)帶來(lái)陀螺輸出的變化,進(jìn)而引起角度變化,馬達(dá)就會(huì)誤動(dòng)作,最后給終端用戶(hù)的直觀感覺(jué)就是飛行器并不平穩(wěn)。
隨著無(wú)人機(jī)的功能不斷增加,GPS傳感器、紅外傳感器、氣壓傳感器、超聲波傳感器越來(lái)越多地被用到無(wú)人機(jī)上。方案商已經(jīng)在利用紅外和超聲波傳感器來(lái)開(kāi)發(fā)出可自動(dòng)避撞的無(wú)人機(jī),以滿(mǎn)足將來(lái)相關(guān)法規(guī)的要求。集成了GPS傳感器的無(wú)人機(jī)則可以實(shí)現(xiàn)一鍵返航功能,防止無(wú)人機(jī)飛行丟失。而內(nèi)置了GPS功能的無(wú)人機(jī),可以在軟件中設(shè)置接近機(jī)場(chǎng)或航空限制的敏感地點(diǎn),不讓飛機(jī)起飛。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論