CDKF算法描述 - CDKF、UKF和EKF濾波算法在GPS系統中的應用比較
2012年07月16日 17:16 本站整理 作者:互聯網 用戶評論(0)
2 中心差分卡爾曼濾波(CDKF)算法描述
CDKF的出發點是借助sterling插值公式,用多項式逼近非線性方程的導數,從而避免復雜的求導運算,它采用中心差分代替Talor展開中的一階和二階導數。對于L維的狀態向量,CDKF的sigma點的個數為2L+1,為了使sigma點具有與真實狀態分布相同的均值、方差和高階中心矩,sigma點和權值按(1)式構造:
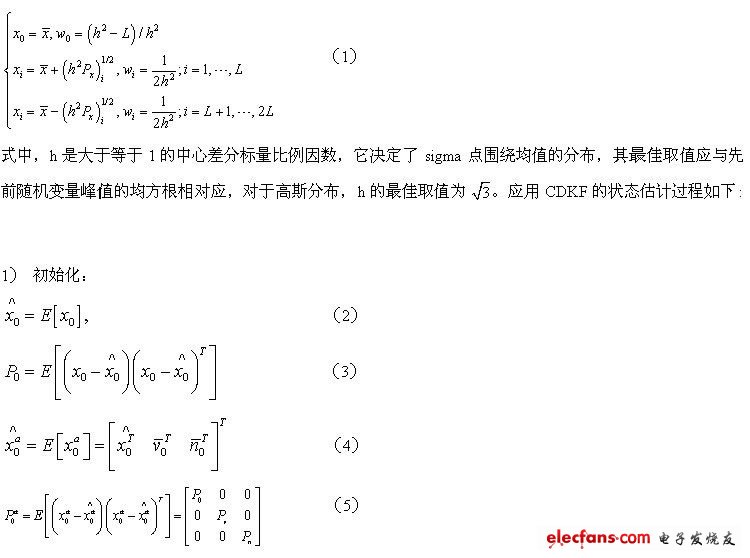

?
?
- 第 1 頁:CDKF、UKF和EKF濾波算法在GPS系統中的應用比較
- 第 2 頁:CDKF算法描述
- 第 3 頁:試驗方案設計與實現
本文導航
非常好我支持^.^
(2) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 基于Simulink搭建二階RC的EKF算法電池SOC估算模型 2023-06-29
- [電子說] 基于EKF算法的電池SOC估算研究 2023-06-28
- [工業控制] 基于擴展卡爾曼濾波EKF的無感控制+Matlab/Simulink仿真案例 2023-06-08
- [電子說] LLM底座模型:LLaMA、Palm、GLM、BLOOM、GPT結構對比 2023-05-19
- [電子說] 關于改進EKF的自抗擾飛控系統的設計 2018-06-13
- [通信設計應用] 一種EKF改進算法探討 2011-08-11
( 發表人:自由頻率 )