CDKF、UKF和EKF濾波算法在GPS系統中的應用比較 - 全文
摘要:本文分別利用CDKF、UKF和EKF三種方法對車輛GPS/DR組合導航系統進行了濾波實驗,實驗結果進一步表明CDKF方法明顯優于EKF和UKF方法,是車輛組合導航中一種更理想的非線性濾波方法,從而真正實現了車輛低成本、高精度的實時定位。
1 引言
全球導航定位系統(GPS)因其可以提供全天候、連續、實時的高精度定位而在車輛定位中得到了廣泛的應用。然而當車輛行駛于地下隧道、高山隧道、高樓等特殊地理環境時,由于GPS衛星遮擋問題的存在會造成GPS無法正常定位;基于此,一般車載導航系統普遍采用低成本的航位推算系統(DR)和GPS來構成組合定位系統。當GPS信號丟失而無法定位時,DR系統可繼續工作,系統的可靠性得到了提高 。
然而,實際的車輛組合導航系統模型一般都是非線性的。利用擴展卡爾曼濾波(EKF)方法,即將非線性方程圍繞狀態估值進行Talor展開,并進行一階線性化截斷,可建立系統的線性化標準卡爾曼濾波模型。但是在實際應用中,EKF也存在著一些不足,如當非線性觀測方程的Talor展開式中的高次項不能忽略時,EKF會導致很大的線性化誤差,造成濾波器難以穩定。
針對EKF的不足,近幾年出現了一套全新的非線性濾波方法,即Sigma-Point卡爾曼濾波(SPKF),其利用加權統計線性化回歸技術(WSLR),通過一組確定性采樣點(Sigma點)來捕獲系統的相關統計參量。根據Sigma點選取的不同,其主要分為Unscented卡爾曼濾波(UKF)和中心差分卡爾曼濾波(CDKF)。
CDKF濾波算法的優勢在于它克服了EKF方法的缺點,濾波時不需要系統模型的具體解析形式,并充分考慮了隨機變量的噪聲統計特性,具有比EKF更小的線性化誤差和更高的定位精度,它對狀態協方差的敏感性要低得多,且逼近速度快于UKF。研究發現CDKF的另一個優點是只使用一個參數h,相對于需要確定三個參數的UKF,在實際應用中更便于實現。
本文分別利用CDKF、UKF和EKF三種方法對車輛GPS/DR組合導航系統進行了濾波實驗,實驗結果進一步表明CDKF方法明顯優于EKF和UKF方法,是車輛組合導航中一種更理想的非線性濾波方法,從而真正實現了車輛低成本、高精度的實時定位。
?
2 中心差分卡爾曼濾波(CDKF)算法描述
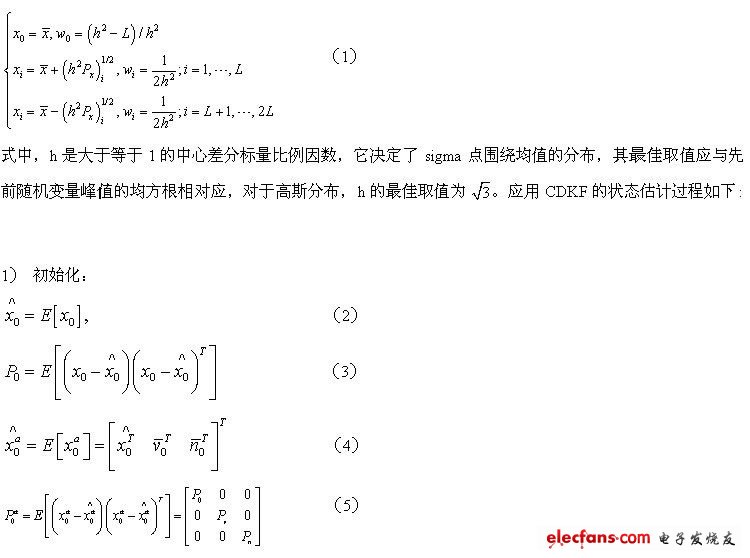
CDKF的出發點是借助sterling插值公式,用多項式逼近非線性方程的導數,從而避免復雜的求導運算,它采用中心差分代替Talor展開中的一階和二階導數。對于L維的狀態向量,CDKF的sigma點的個數為2L+1,為了使sigma點具有與真實狀態分布相同的均值、方差和高階中心矩,sigma點和權值按(1)式構造:

?
?
3 試驗方案設計與實現
為了驗證本文所述新的卡爾曼濾波器的有效性和優越性,使用兩個精度相差一個數量級的GPS接收平臺,高精度的GPS接收平臺使用精度較高的接收機及DGPS方法,接收到的高精度動態定位數據作為系統真實值。低精度的GPS接收平臺選用精度與前者相差一個數量級的接收機及單機GPS方法,接收到的低精度動態定位數據作為卡爾曼濾波器的濾波對象,用濾波以后的狀態估計值與系統狀態真實值進行比較,來衡量濾波的效果。
3.1 試驗平臺及軟件
在這里高精度的GPS接收平臺選用CMC公司AllStar Base GPS板和MDS公司MDS OEM Series TM電臺作為基準站,移動站選用CMC公司SuperStar GPS板和MDS公司MDS OEM Series TM電臺,能使定位精度保持在2m左右。低精度的GPS接收平臺選用GARMIN公司出品的OEM板GPS35LP(GPS35-HVS)。作者于2008年2月將DGPS的基準站設在江蘇大學電氣大樓,DGPS的移動站和單機GPS接收機置于車內,于江蘇大學校門口學府路段做勻速運動,使用starview monitor和u-center 4.01在上位機上進行數據的同步接收。試驗設備如圖1、圖2所示。
圖1 DGPS的基準站
圖2 DGPS的移動站和單機GPS
3.2 試驗結果及分析
試驗接收的到的部分數據如下:見表1。
表1 接收機接收到的數據

將新的CDKF濾波算法應用到GPS導航定位系統中。分別采用EKF,UKF和CDKF三種濾波算法分別對實驗獲得的GPS數據進行濾波處理。試驗結果如圖3、圖4所示。為了更直觀地表現三種濾波算法的效果,分別將三種濾波方法的誤差均值列于表2。
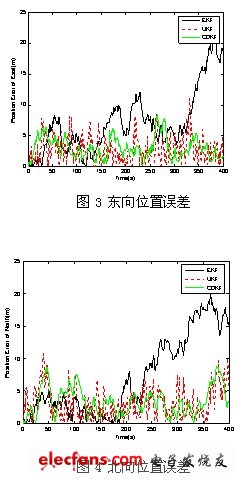
從濾波曲線圖3和圖4可以看出:采用CDKF和UKF濾波的東北向位置誤差都控制在10米以內,而采用EKF的位置誤差比較大;從表2也可以得出,對于經緯度誤差均值和東北向速度誤差來說,CDKF和UKF兩種算法也明顯優于EKF,可見,CDKF濾波的定位精度和可靠性都大大高于了EKF,但是UKF的計算量相對EKF略有增加,而由于CDKF相對UKF的計算參數減少,因此逼近速度相對提高,使得計算量也有所減少。
表2 三種濾波算法的誤差比較

4 結論
本文闡述了一種新的濾波算法-中心差分卡爾曼濾波,并將其應用到GPS/DR組合導航系統中,分析了其在濾波方法和計算過程中的明顯優勢,通過多次實驗、參數調試得出EKF、UKF和CDKF三種濾波的實驗對比,無論是在定位精度、速度方面還是計算量上,CDKF都優于前兩者,并且其實現方法相對簡單,應用范圍更為廣泛,是動態系統一種有效的狀態估計算法。
?
- 第 1 頁:CDKF、UKF和EKF濾波算法在GPS系統中的應用比較
- 第 2 頁:CDKF算法描述
- 第 3 頁:試驗方案設計與實現
本文導航
非常好我支持^.^
(2) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 基于Simulink搭建二階RC的EKF算法電池SOC估算模型 2023-06-29
- [電子說] 基于EKF算法的電池SOC估算研究 2023-06-28
- [工業控制] 基于擴展卡爾曼濾波EKF的無感控制+Matlab/Simulink仿真案例 2023-06-08
- [電子說] LLM底座模型:LLaMA、Palm、GLM、BLOOM、GPT結構對比 2023-05-19
- [電子說] 關于改進EKF的自抗擾飛控系統的設計 2018-06-13
- [通信設計應用] 一種EKF改進算法探討 2011-08-11
( 發表人:自由頻率 )