
") i.MX6ULL嵌入式Linux開發(fā)6-系統(tǒng)燒寫到eMMC
i.MX6ULL嵌入式Linux開發(fā)6-系統(tǒng)燒寫到eMMC
本篇主要介紹了Linux移植的系統(tǒng)打包燒錄的EMMC的方法,使用MfgTool工具,將**uboot....
i.MX6ULL驅(qū)動(dòng)開發(fā)1—字符設(shè)備開發(fā)模板
本篇介紹了嵌入式Linux驅(qū)動(dòng)開發(fā)中的基礎(chǔ)驅(qū)動(dòng)——字符驅(qū)動(dòng)開發(fā)的基本模式,使用了一個(gè)虛擬的字符設(shè)備驅(qū)....
i.MX6ULL驅(qū)動(dòng)開發(fā)2—新字符設(shè)備開發(fā)模板
上篇文章介紹了字符設(shè)備的開發(fā)模板,但那是一種舊版本的驅(qū)動(dòng)開發(fā)模式,設(shè)備驅(qū)動(dòng)需要手動(dòng)分配設(shè)備號(hào)再使用 ....
i.MX6ULL嵌入式Linux開發(fā)5-根文件系統(tǒng)完善
上篇文章,使用BusyBox構(gòu)建了基礎(chǔ)的嵌入式Linux系統(tǒng)的根文件系統(tǒng),基本的功能可以正常運(yùn)行,但....
i.MX6ULL嵌入式Linux開發(fā)4-根文件系統(tǒng)構(gòu)建
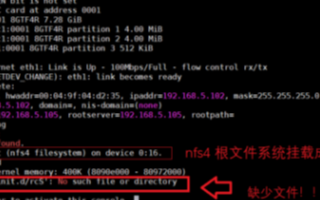
本篇使用BusyBox來構(gòu)建根文件系統(tǒng),并通過NFS網(wǎng)絡(luò)調(diào)試的方式實(shí)現(xiàn)根文件系統(tǒng)掛載測試,實(shí)測時(shí)解決....

i.MX6ULL嵌入式Linux開發(fā)2-uboot移植實(shí)踐
上篇文章,我們介紹了如何使用NXP原廠的uboot進(jìn)行編譯和燒寫,將uboot運(yùn)行在自己的開發(fā)板上。....

i.MX6ULL嵌入式Linux開發(fā)1-uboot移植初探
本系列教程以i.MX6ULL處理器的ARM開發(fā)板為實(shí)驗(yàn)基礎(chǔ),學(xué)習(xí)記錄嵌入式Linux開發(fā)的各種知識(shí)與....
電機(jī)控制進(jìn)階3——PID串級(jí)控制
前兩篇文章,分別介紹了PID速度控制和PID位置控制,分別用來控制電機(jī)以期望的速度持續(xù)轉(zhuǎn)動(dòng)以及以期望....

電機(jī)控制基礎(chǔ)3——定時(shí)器編碼器模式使用與轉(zhuǎn)速計(jì)算
上篇介紹了 定時(shí)器捕獲輸入脈沖的原理 ,那種方式是根據(jù)捕獲的原理,手動(dòng)切換上升沿與下降沿捕獲,計(jì)算脈....

電機(jī)控制基礎(chǔ)2——定時(shí)器捕獲單輸入脈沖原理
上篇介紹了定時(shí)器的 輸出 功能,本篇介紹定時(shí)器的 輸入 功能。 1 問題引出 在單片機(jī)與嵌入式開發(fā)中....

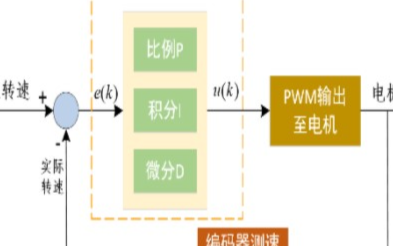
電機(jī)控制基礎(chǔ)知識(shí)1—定時(shí)器基礎(chǔ)知識(shí)與PWM輸出原理
單片機(jī)開發(fā)中,電機(jī)的控制與定時(shí)器有著密不可分的關(guān)系,無論是直流電機(jī),步進(jìn)電機(jī)還是舵機(jī),都會(huì)用到定時(shí)器....

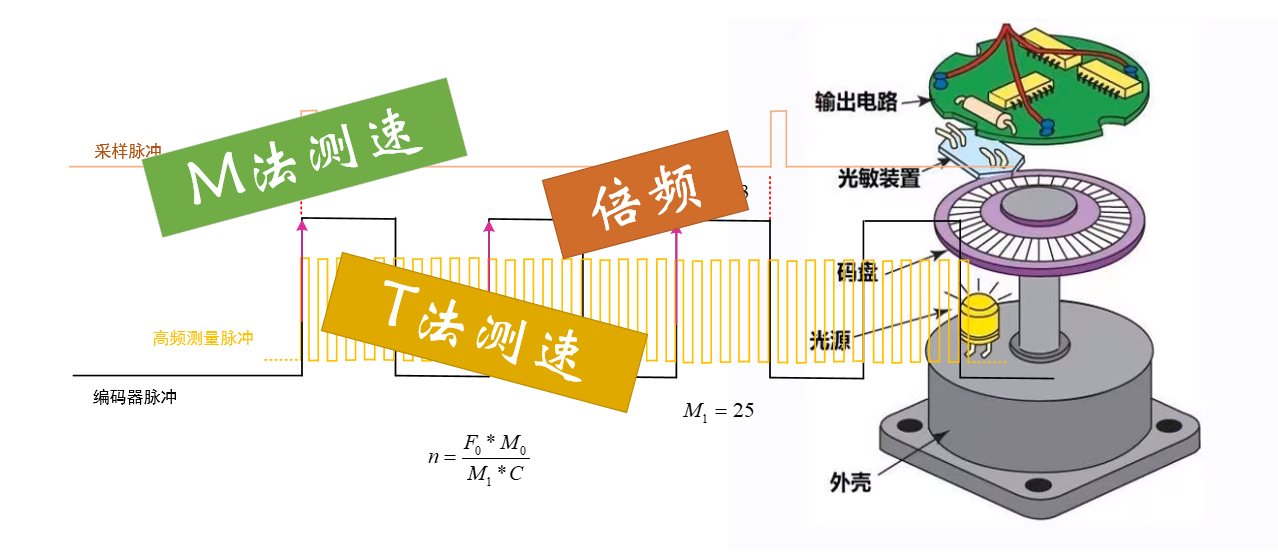
編碼器計(jì)數(shù)原理與電機(jī)測速原理——多圖解析
編碼器,是一種用來測量機(jī)械旋轉(zhuǎn)或位移的傳感器。它能夠測量機(jī)械部件在旋轉(zhuǎn)或直線運(yùn)動(dòng)時(shí)的位移位置或速度等....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)