在Verilog中實(shí)現(xiàn)Moore型和Mealy型狀態(tài)機(jī)的方法簡析
編寫能夠被綜合工具識(shí)別的狀態(tài)機(jī),首先需要理解狀態(tài)機(jī)的基本概念和分類。狀態(tài)機(jī)(FSM)是表示有限個(gè)狀態(tài)....
VHF頻段船舶自動(dòng)識(shí)別系統(tǒng)的工作機(jī)制
AIS網(wǎng)絡(luò)包括岸基AIS、船載AIS、星載AIS,根據(jù)AIS的不通應(yīng)用,可將AIS分為移動(dòng)站和固定站....

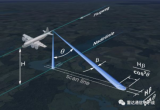
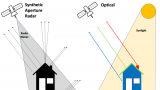
SAR的工作模式“知多少”?
家知道合成孔徑雷達(dá)(SAR)是一種利用雷達(dá)與目標(biāo)的相對(duì)運(yùn)動(dòng)把尺寸較小的真實(shí)天線孔徑用數(shù)據(jù)處理的方法合....

AMD Xilinx 7系列FPGA的Multiboot多bit配置
Multiboot是一種在AMD Xilinx 7系列FPGA上實(shí)現(xiàn)雙鏡像(或多鏡像)切換的方案。它....

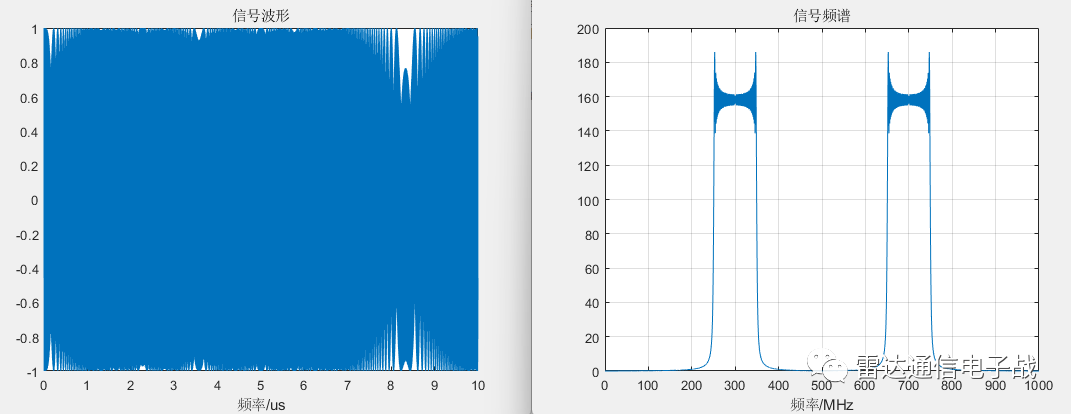
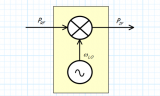
雷達(dá)波形的產(chǎn)生與脈沖壓縮技術(shù)
相位編碼信號(hào)的相位調(diào)制函數(shù)是離散的有限狀態(tài),屬于“離散型“編碼脈沖壓縮信號(hào)。
在相位編....

一款綜合電子戰(zhàn)系統(tǒng)的架構(gòu)
非通信電子支持系統(tǒng),由最新的數(shù)字接收機(jī)技術(shù)組成,以提供高效的電子戰(zhàn)系統(tǒng),采用了寬帶數(shù)字接收機(jī)(0.5....

中星聯(lián)華推出新一代晶振級(jí)SLFS-Pro系列超低相噪微波信號(hào)源
2024年1月18日,中星聯(lián)華科技(Sinolink Technologies)開啟“精益求精,源為....

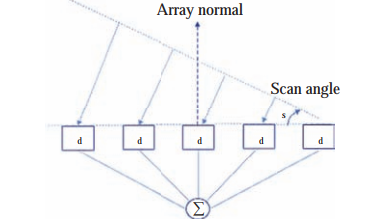
寬帶陣列會(huì)遇到什么問題?
對(duì)于窄帶電子掃描陣列的實(shí)現(xiàn),中心頻率可用于計(jì)算整個(gè)陣面的相位變化。然而,對(duì)于寬帶,使用信號(hào)帶寬內(nèi)的實(shí)....
短時(shí)傅里葉變換STFT原理詳解
傳統(tǒng)傅里葉變換的分析方法大家已經(jīng)非常熟悉了,特別是快速傅里葉變換(FFT)的高效實(shí)現(xiàn)給數(shù)字信號(hào)處理技....

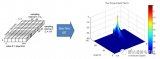
SAR的基礎(chǔ)知識(shí)和處理過程詳解
合成孔徑雷達(dá)天線往往僅用單個(gè)輻射單元,沿一直線依次在若干個(gè)位置平移,且在每一個(gè)位置發(fā)射一個(gè)脈沖信號(hào),....
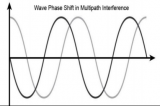
輻射源的“多徑效應(yīng)”是如何產(chǎn)生的
多徑效應(yīng)是一種現(xiàn)象,某個(gè)輻射源的波經(jīng)過兩條或多條路徑傳播到接收機(jī),如果波保持相干,波的兩個(gè)或多個(gè)分量....
MicroSAR數(shù)字接收機(jī)的FPGA實(shí)現(xiàn)
之前給大家介紹過楊百翰大學(xué)地球微波遙感實(shí)驗(yàn)室(MERS)開發(fā)的microSAR,一種小型低成本LFM....
MIMO雷達(dá)射頻系統(tǒng)的構(gòu)建挑戰(zhàn)和關(guān)鍵特性
多輸入多輸出(Multiple Input Multiple Output,MIMO)雷達(dá)把無線通信....
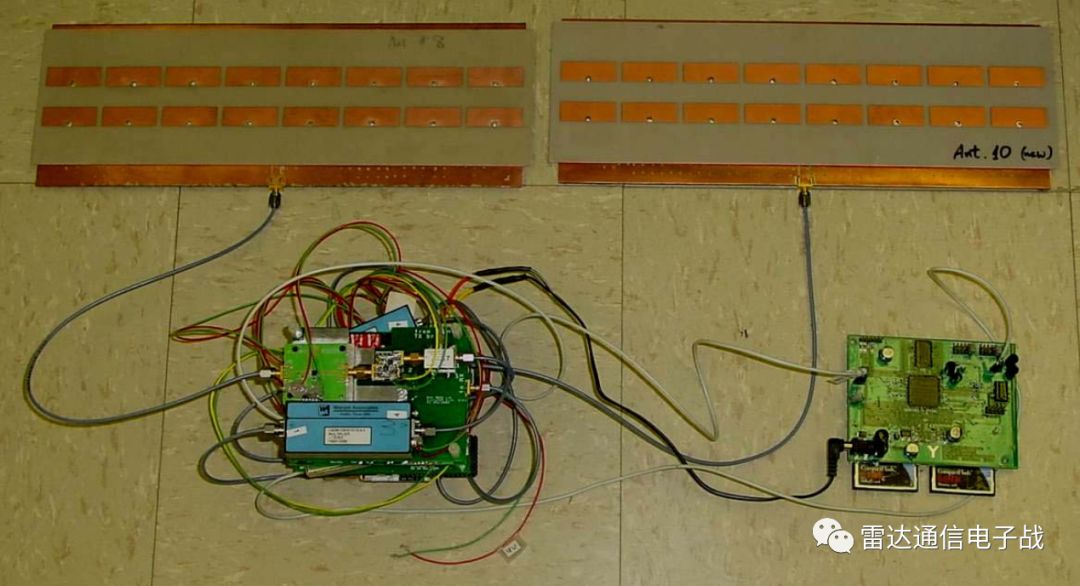
對(duì)小型無人機(jī)通信鏈路的掃頻噪聲干擾
小型無人機(jī)系統(tǒng)(sUAS)在政府、商業(yè)和私人使用中變得越來越普遍和廉價(jià)。有幾種反sUAS產(chǎn)品采用電磁....

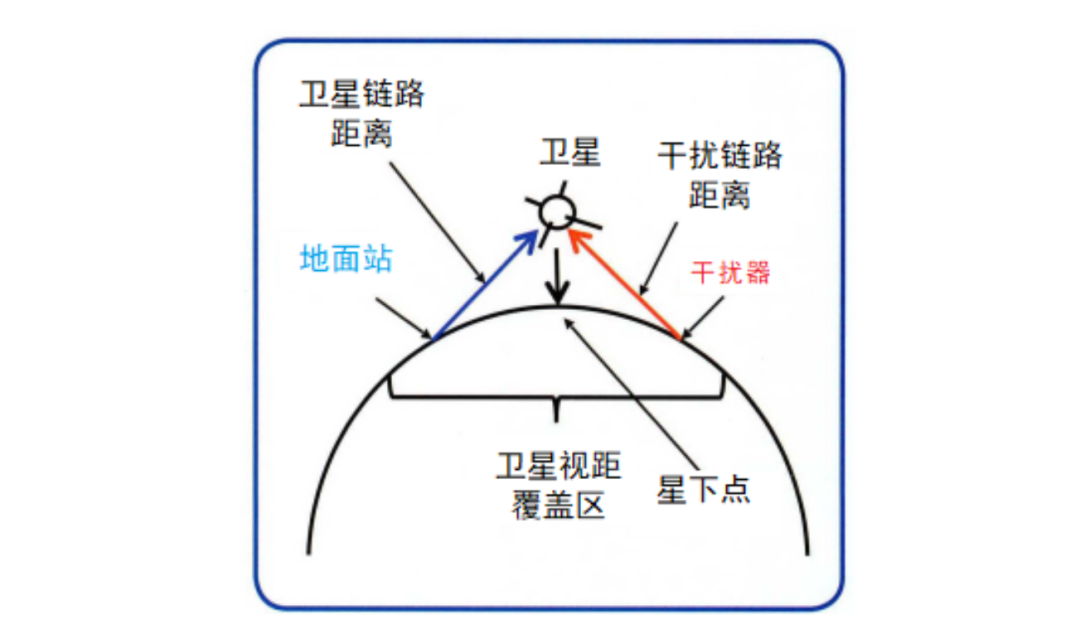
衛(wèi)星通信干擾的計(jì)算公式
衛(wèi)星離地球很遠(yuǎn),其視距范圍能覆蓋地球表面很大一部分區(qū)域,因此,它們也非常容易受到較強(qiáng)的敵方信號(hào)的影響....
電掃陣列(ESA)在雷達(dá)通信中的應(yīng)用
相控陣?yán)走_(dá)的出現(xiàn)最初是為了防御導(dǎo)彈,通常工作在超高頻波段。在1960年至1980年間建造的相控陣?yán)走_(dá)....
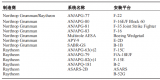
F-35的新型雷達(dá)APG-85的關(guān)鍵技術(shù)有哪些?
新的APG-85雷達(dá)系統(tǒng)將提供更高的可靠性和更低的燃油消耗,同時(shí)也能增加10%的功率,有助于提高飛機(jī)....
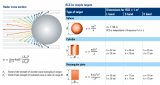
雷達(dá)散射截面積(RCS)的專業(yè)知識(shí)
諧振區(qū)或Mie區(qū)。在此區(qū)域,波長與目標(biāo)尺寸相當(dāng)。目標(biāo)雷達(dá)散射截面積隨著頻率變化而變化,變化范圍可達(dá)1....
雷達(dá)干擾追蹤器(RIT),使用公開數(shù)據(jù)追蹤軍事雷達(dá)
首先,Ollie Ballinger使用的是公開可獲得的數(shù)據(jù),這些數(shù)據(jù)是通過衛(wèi)星捕獲的,他使用這些數(shù)....
在距離多普勒處理中使用Keystone變換進(jìn)行距離徙動(dòng)校正
常規(guī)的距離多普勒處理采集相干處理時(shí)間(CPI)內(nèi)快時(shí)間/慢時(shí)間數(shù)據(jù),并對(duì)所有距離單元的做慢時(shí)間維的離....
激光雷達(dá)的用途
雷達(dá)是一種探測系統(tǒng),它使用無線電波來確定目標(biāo)的距離、角度或速度,它可以用來探測飛機(jī)、船舶、航天飛行器....
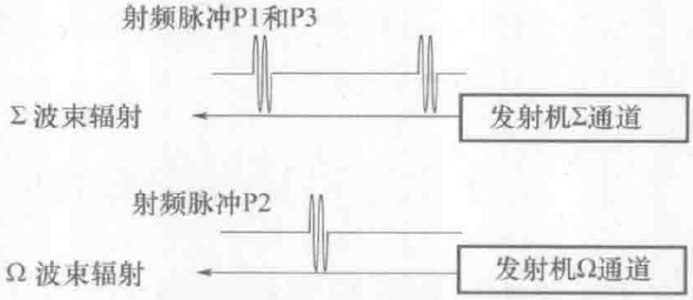
IFF系統(tǒng)的工作過程和關(guān)鍵技術(shù)
IFF系統(tǒng)是指敵我識(shí)別系統(tǒng),在軍用上第一種較為實(shí)用的IFF系統(tǒng)為Mark X系統(tǒng),但它最大的缺陷在于....
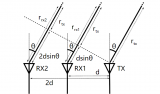
MIMO雷達(dá)天線陣列設(shè)計(jì)
一部帶有一個(gè)發(fā)射機(jī)和一個(gè)接收機(jī)的雷達(dá)可以根據(jù)發(fā)射電磁波的往返時(shí)間來測量目標(biāo)的距離,但不能測量目標(biāo)的角....
在Matlab中產(chǎn)生三種不同分布熱噪聲的簡單方法
在我們仿真雷達(dá)信號(hào)處理流程時(shí),需要先仿真雷達(dá)的回波信號(hào),同時(shí)為了更符合實(shí)際情況,我們還需要給雷達(dá)回波....
Verilog基礎(chǔ):介紹幾個(gè)常用的按位操作符
位操作符是對(duì)二進(jìn)制位進(jìn)行操作的運(yùn)算符。以下是一些常用的位操作符
Verilog基礎(chǔ):幾個(gè)常用的按位操作符
位操作符是對(duì)二進(jìn)制位進(jìn)行操作的運(yùn)算符。
使用“~”運(yùn)算符對(duì)單bit信號(hào)進(jìn)行取反
使用“~”運(yùn)算符對(duì)單bit信號(hào)進(jìn)行取反(也稱為位翻轉(zhuǎn)或反向)。

雷達(dá)通信領(lǐng)域中的?1dB壓縮點(diǎn)與動(dòng)態(tài)范圍有什么關(guān)系呢?
1dB壓縮點(diǎn)是衡量放大器非線性程度的一個(gè)指標(biāo),是指當(dāng)輸入功率增加時(shí),輸出功率的線性增益開始?jí)嚎s的點(diǎn),....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)