 電子發(fā)燒友App
電子發(fā)燒友App


?
傳統(tǒng)的直流電機調(diào)速方法很多,如調(diào)壓調(diào)速、弱磁調(diào)速等,它們存在著調(diào)速響應慢、精度差、調(diào)速裝置復雜等缺點。隨著全控式電力電子器件技術的發(fā)展, 以大功率晶體管作為開關器件的直流脈寬調(diào)制(PWM)調(diào)速系統(tǒng)已成為直流調(diào)速系統(tǒng)的主要發(fā)展方向。
為配套24V直流電機,設計了一種直流無刷電機驅(qū)動器。采用美國Microchip公司的PIC16F690單片機作為控制器, MOSFET為驅(qū)動元件, 配以相應的控制軟件構成控制系統(tǒng)。實踐表明,整個系統(tǒng)的精度、快速性以及可靠性等指標都能滿足實際需求。
1 PWM 直流調(diào)速原理
在PWM 調(diào)速系統(tǒng)中,一般可以采用定寬調(diào)頻、調(diào)寬調(diào)頻、定頻調(diào)寬3 種方法改變控制脈沖的占空比,但是前兩種方法在調(diào)速時改變了控制脈寬的周期,從而引起控制脈沖頻率的改變, 當該頻率與系統(tǒng)的固有頻率接近時將會引起振蕩。為避免之,設計采用定頻調(diào)寬改變占空比的方法來調(diào)節(jié)直流電動機電樞兩端電壓。
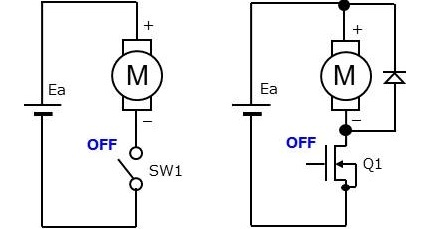
定頻調(diào)寬法的基本原理是按一個固定頻率來接通和斷開電源,并根據(jù)需要改變一個周期內(nèi)接通和斷開的時間比(占空比)來改變直流電機電樞上電壓的占空比,從而改變平均電壓,控制電機的轉速。在PWM 調(diào)速系統(tǒng)中,當電機通電時其速度增加,電機斷電時其速度減低。只要按照一定的規(guī)律改變通、斷電的時間,即可控制電機轉速。而且采用PWM 技術構成的無級調(diào)速系統(tǒng),啟停時對直流系統(tǒng)無沖擊, 并且具有啟動功耗小、運行穩(wěn)定的優(yōu)點。為了說明問題,現(xiàn)假定電機始終接通電源時,電機最大轉速為Vmax, 占空比為D = t /T, 則電機的平均速度Vd = D*Vmax, 由公式可知,當改變占空比D = t /T 時,就可以得到不同的電機平均速度Vd,從而達到調(diào)速的目的。
在一般應用中,可將平均速度與占空比D 近似地看成線性關系。
2 系統(tǒng)硬件設計
2.1 總體設計原理
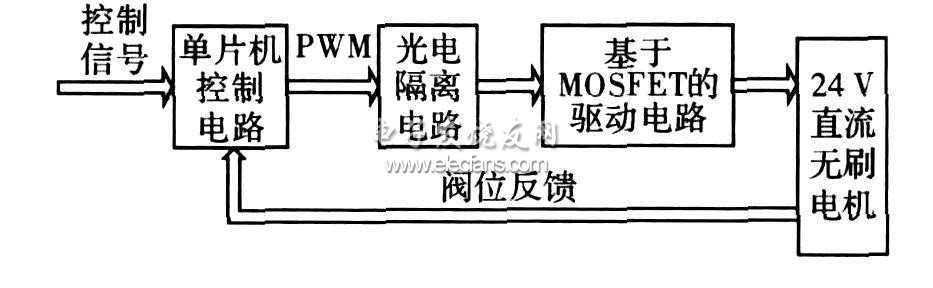
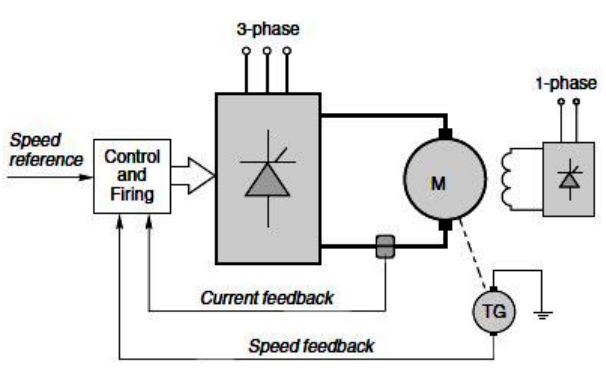
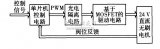
系統(tǒng)要求電機能夠按照設定值運轉,并能實現(xiàn)正反轉控制,根據(jù)直流電機的PWM 控制要求,控制系統(tǒng)的硬件部分主要包括單片機控制電路、光電隔離電路、驅(qū)動電路等幾個部分,系統(tǒng)的硬件原理框圖,如圖1所示。控制信號送入PIC 單片機模擬口,經(jīng)過處理后,輸出PWM控制脈沖,為了提高系統(tǒng)的抗干擾性,在單片機控制電路和電機驅(qū)動電路之間用光電耦合器( TLP521) 實現(xiàn)電氣隔離, 隔離后的控制信號經(jīng)電機驅(qū)動邏輯電路產(chǎn)生電機邏輯控制信號, 分別控制H橋的上下臂,從而實現(xiàn)電機的正反轉和調(diào)速的目的, 同時電機的轉速能通過編碼器反饋給單片機, 實現(xiàn)速度的閉環(huán)控制。
?
圖1 控制系統(tǒng)原理框圖
2.2 控制電路
在單片機控制電路設計中, 選用美國Microchip公司的PIC16F690單片機, 與其他系列單片機相比, 它的最大優(yōu)點表現(xiàn)在引腳少、功能強、可直接帶LED負載; 具有低耗能工作方式, 較簡便地實現(xiàn)掉電保護;外圍配置簡單、明晰、提高了整機的可靠性; 并且具有較強的抗干擾性, 大大提高了抵御外界的電磁干擾和本機控制電路的電磁干擾的能力, 從而提高了工業(yè)電腦自動控制器的適應能力。
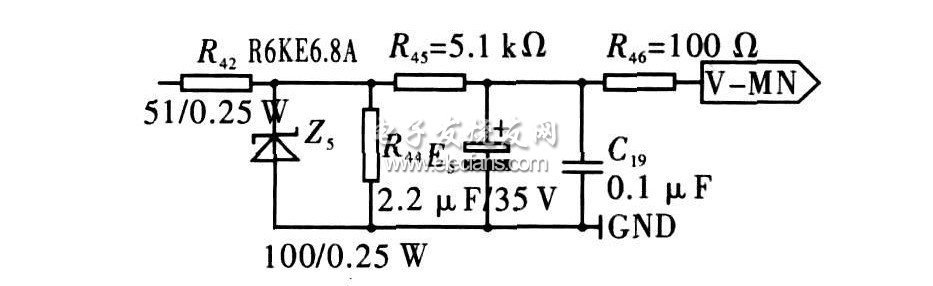
設計中, 要求電壓和電流信號都能作為控制信號, 達到控制電機的轉向及轉速目的, 為此先設計了一個電流/電壓轉換電路, 如圖2所示。若輸入4~20mA 控制電流, 則可以在采樣電阻R44上形成0 4~2 V 的電壓值, 輸入到單片機中進行處理。在采樣電阻的兩端并聯(lián)一個瞬態(tài)二極管, 起到保護的作用, 電容的存在可以起到濾波作用, 令輸入到單片機的電壓信號更加穩(wěn)定。
?
圖2 電流/電壓轉換電路
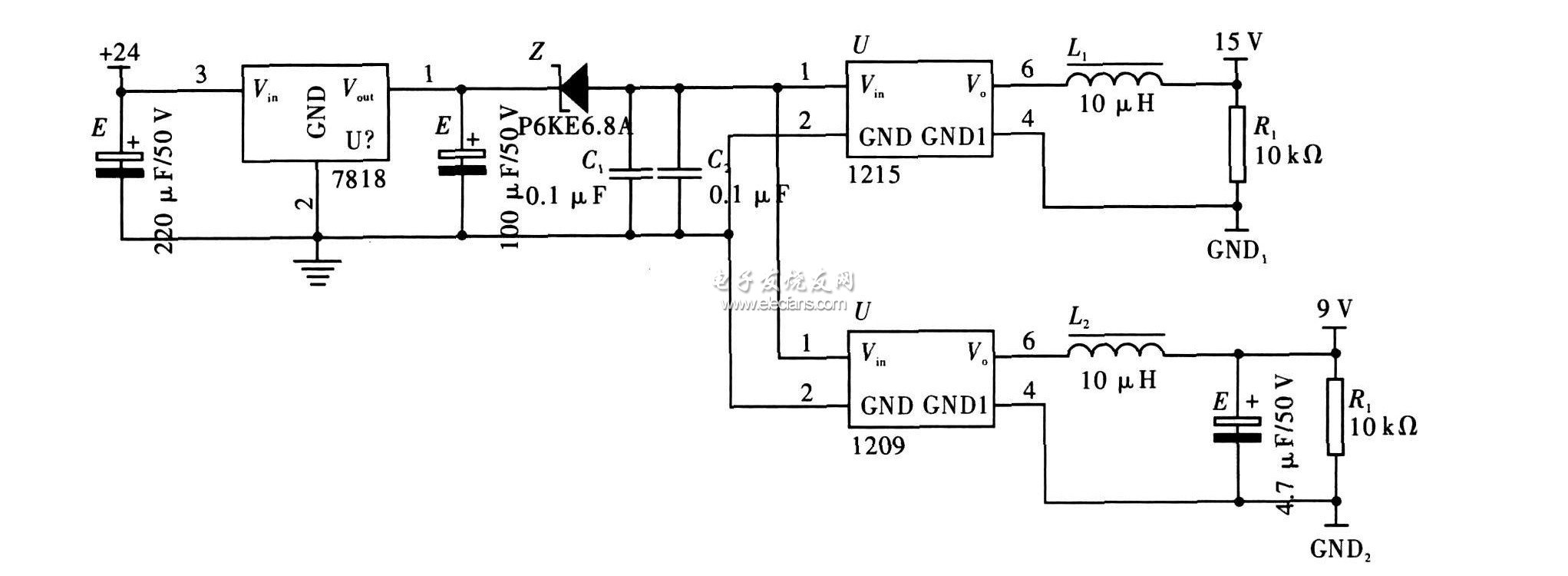
由于電機在正常工作時對電源的干擾很大, 如果只用一組電源會影響單片機的正常工作, 所以選用雙電源供電。電源系統(tǒng)采用DC /DC 轉換芯片IB1215LS- 1W 和IB1209LS - 1W, 電路設計, 如圖3 所示。
為防止瞬時輸入電壓過大, 在電源入口放置穩(wěn)壓芯片7818, 再經(jīng)過瞬態(tài)二極管的降壓, 最后進入DC /DC芯片, 得到兩路電壓15 V 和9 V, 電感L 1 和L2 的作用是組成 LC濾波網(wǎng)絡, 可以進一步減少輸入輸出紋波, 利用這兩路電壓經(jīng)過三端穩(wěn)壓芯片78L05就可以得到需要的5 V和+ 5 V 兩路電源系統(tǒng), 分別給單片機控制電路和驅(qū)動電路供電。
?
圖3 系統(tǒng)的電源電路設計
2.3 驅(qū)動電路
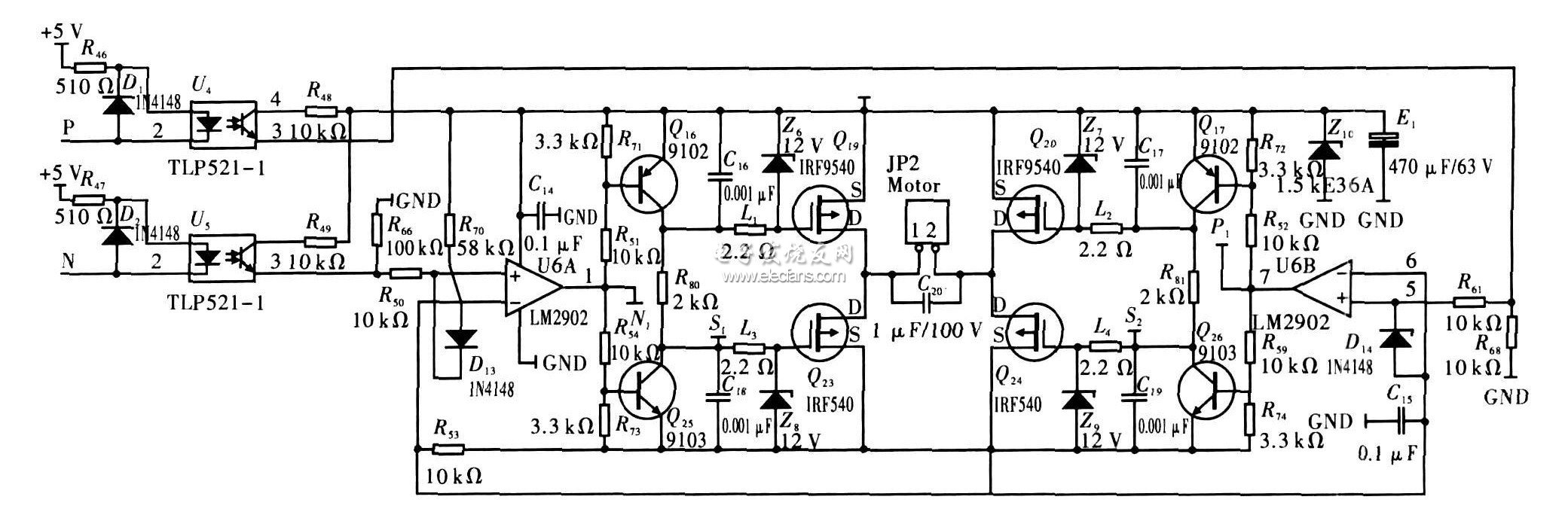
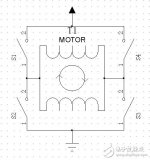
由于功率MOSFET 是壓控元件, 具有輸入阻抗大、開關速度快、無二次擊穿現(xiàn)象等特點, 滿足高速開關動作需求, 因此采用IR 公司的場效應管IRF9540和IRF540構成H 橋電路的橋臂。H 橋電路中的4個功率MOSFET 分別采用n溝道型和p溝道型, 設計的電路原理, 如圖4所示。
數(shù)字電平上下跳變時, 集成電路耗電發(fā)生突變,引起電源產(chǎn)生毛刺。數(shù)字電路越復雜, 數(shù)據(jù)速率越高, 累計的電流跳變越強烈, 高頻分量越豐富, 而普通印刷電路板不能完全吸收邏輯電平跳變產(chǎn)生的電壓毛刺, 這種噪聲會嚴重干擾電路。為了實現(xiàn)模擬電路和數(shù)字電路的隔離, 提高信噪比, 有效的抑制噪聲對模擬電路的干擾, 在PWM 信號從控制系統(tǒng)引出之后, 需要經(jīng)過光電隔離, 才能送入驅(qū)動電路。在不影響驅(qū)動器整體性能的前提下, 使用TLP521- 1光電耦合器, 主要考慮的是價格因素。
運放2902在電路中用作比較器, 把輸入邏輯信號同基準電壓比較, 轉換成接近功率電源電壓幅度的方波信號。運放的輸入電壓范圍不能接近負電源電壓, 否則會出錯。因此在運放輸入端增加了防止電壓范圍溢出的二極管D 13。輸入端的電阻R 50用于限流,R66用于在輸入懸空時把輸入端降為低電平。
當運放2902 輸出端為低電平時, 三極管Q25截止, 場效應管Q23導通。三極管Q16導通, 場效應管Q19截止, 輸出為高電平。當運放輸出端為高電平時,三極管Q25導通, 場效應管Q23截止。三極管Q16截止, 場效應管Q19導通, 輸出為低電平。
?
圖4 基于MOSFET的驅(qū)動電路設計
3 系統(tǒng)軟件設計
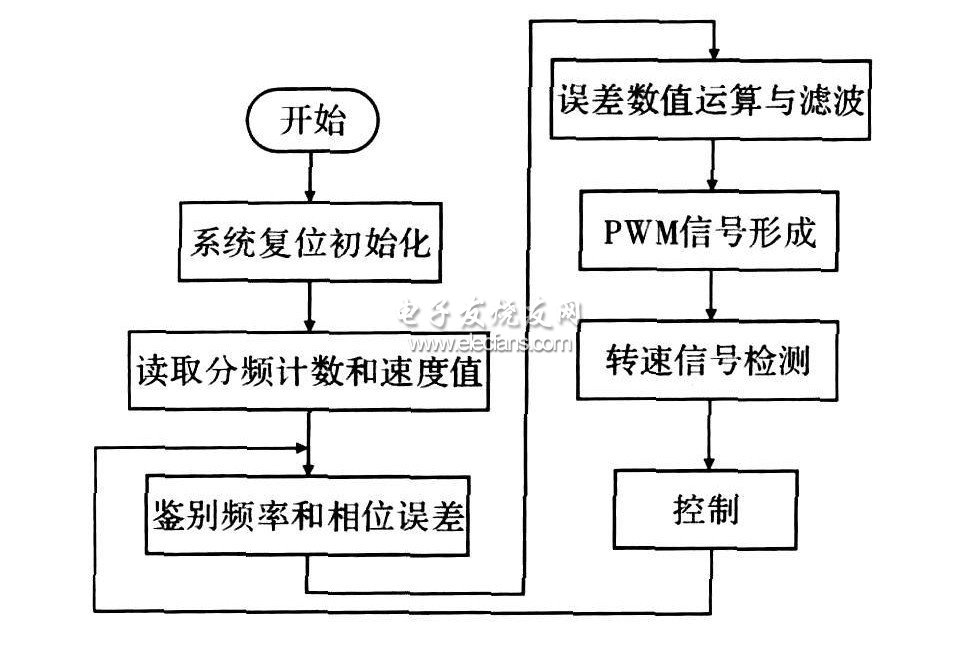
軟件設計采用匯編語言編寫, 在M plab集成開發(fā)環(huán)境中進行編譯、仿真, 用軟件來實現(xiàn)硬件的功能,不但可以降低成本, 提高系統(tǒng)的可靠性, 還能簡化硬件結構, 但其缺點是響應時間比用硬件實現(xiàn)長, 而且還要占用CPU 時間。設計過程中, 在滿足可行性和實時性的前提下盡可能地將硬件功能用軟件來實現(xiàn), 系統(tǒng)主程序流程圖, 如圖5所示。
?
圖5 控制系統(tǒng)主程序流程圖
4 結語
干擾現(xiàn)象是電路調(diào)試和設計時必須考慮和重點解決的問題, 不同電路其干擾源千差萬別, 干擾傳播途徑也多種多樣, 干擾現(xiàn)象也各不相同, 但它們?nèi)杂泄残浴O到y(tǒng)在設計和調(diào)試中就考慮了這些共性因素, 并結合具體工作環(huán)境和各部分功能電路, 采取了必要的抗干擾措施, 具體有如下幾點:
(1)合理布置電源濾波、退耦電容;
(2)分區(qū)布局, 將數(shù)字電路與模擬電路分開;
(3)合理設計地線;
(4)電流通路的面積最小;
( 5)盡量加粗接地線和電源線;
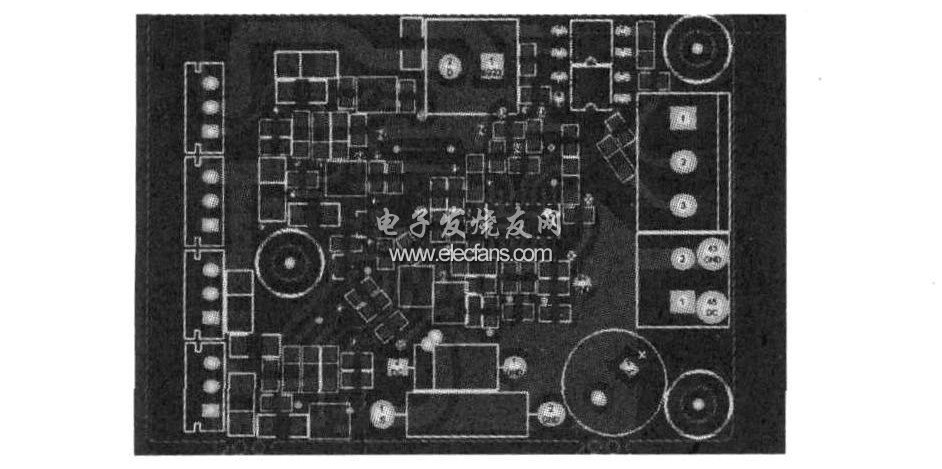
在控制系統(tǒng)設計中, 將控制電路和驅(qū)動電路分兩塊板布局, 其中驅(qū)動板的PCB 設計, 如圖6 所示,經(jīng)實驗證明, 抗干擾措施取得了較理想的效果。
?
圖6 驅(qū)動電路PCB板設計圖












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論