 電子發燒友App
電子發燒友App


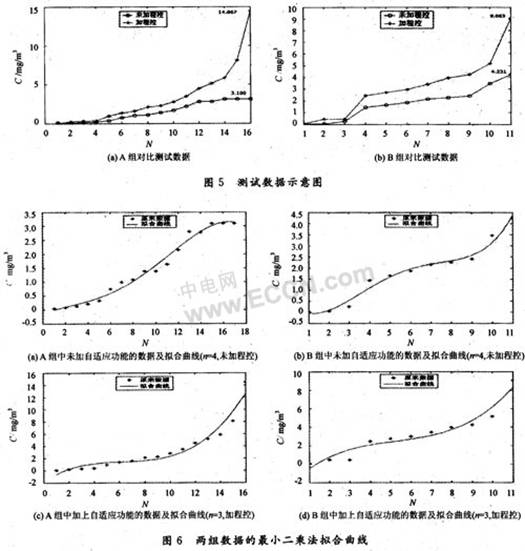
摘要:為了擴大粉塵測量儀的測量范圍,采用一種自適應的測量方法,即根據被測環境粉塵的濃度自動調節傳感器的接收靈敏度,并結合相應的軟件算法,使高、低濃度的粉塵都能得到有效測量。在設計過程中運用PID算法對測量過程進行控制,使測量儀在運行中進行實時調節,以降低測量數據的振蕩。通過對煙霧釋放出粉塵的濃度測量,運用Matlab對測量數據進行擬合,得到了平滑的響應曲線。實測結果表明,該方法有效地擴大了測量范圍,使測量范圍達到了0.01~48 mg/m3。
關鍵詞:自適應;粉塵測量;PID;數字濾波
隨著我國現代工業的發展,空氣中粉塵的污染越來越嚴重。目前我國一些環保部門仍采用“濾膜稱重法”測量粉塵濃度,這種方法不能實現在線連續測量,且測量誤差較大。國外均采用基于光散射理論的在線測量,該技術已非常成熟。目前我國也展開了基于光散射測量粉塵技術的研究,但與國外技術相比,還有很大差距。在多年對光散射法測量粉塵濃度的研究中體會到這種方法的測量范圍小,儀器數據顯示不穩定,本文提出一種自適應測量方法,通過實驗驗證,該方法能有效擴大測量范圍,減小振蕩。
1 儀器的總體設計
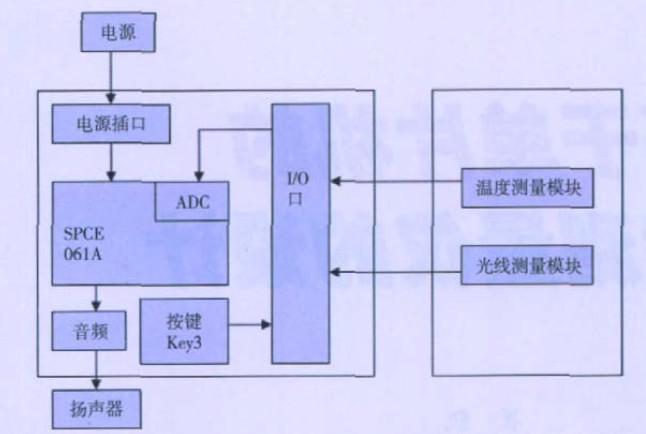
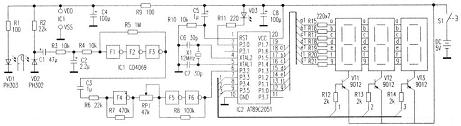
測量儀主要由光學傳感器、氣路系統、光/電轉換、放大器、A/D轉換、微機控制與管理系統、電源系統組成,其總體結構如圖1所示。儀器的工作過程如下:

?
由半導體激光器發出的光波穿過具有粉塵的被測區域后,光學傳感器將接收到的光信號轉換成電信號。為確保能對信號直接進行A/D轉換,提高信號的抗干擾能力和儀器的靈敏度,還必須對信號進行調理。調理后的電信號通過A/D轉換后再傳送到微處理器,通過微處理器對數據進行處理分析再顯示。
2 自適應測量的實現
2.1 自適應調節原理
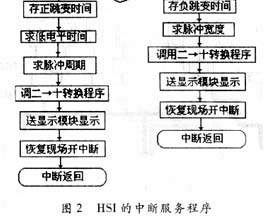
采用一般傳感器測量粉塵濃度,其測量范圍約為0~3 mg/m3。為保證高濃度和低濃度的測量準確性,擴大儀器的測量范圍,本文提出了一種通過調節傳感器接收靈敏度來實現自適應調節的算法(調節原理如圖2所示),即當被測環境的粉塵濃度較低時,提高傳感器的接收靈敏度;當被測環境的粉塵濃度較高時,降低傳感器的接收靈敏度,并通過實驗對這種方法進行了驗證,圖3是軟件控制流程圖。

?
2.2 實現電路
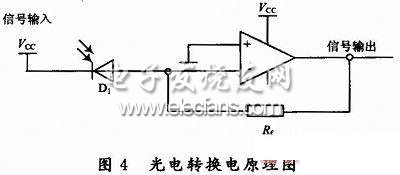
圖4是光電轉換原理圖,Rf是程控的電阻調節網絡,通過對Rf值的調節,改變傳感器的接收靈敏度,使不同信號值均能得到有效測量。其功能實現如下:當儀器進入測量時,微處理器發出控制命令,使傳感器處于接收靈敏度最高狀態。讀取數據后判斷傳感器是否處于最佳工作狀態,若發現溢出或不在最佳工作狀態,則改變傳感器的接收靈敏度,使其進入最佳的工作狀態。為了使測量數據統一,通過軟件對測得的數據進行修正。
?




















 工商網監
工商網監
評論