 電子發(fā)燒友App
電子發(fā)燒友App


3.1 測(cè)量數(shù)據(jù)的濾波處理
該測(cè)量?jī)x是數(shù)據(jù)更新率較高的實(shí)時(shí)系統(tǒng),為克服采集系統(tǒng)采集數(shù)據(jù)時(shí)隨機(jī)干擾帶來(lái)的誤差,軟件上對(duì)測(cè)得的數(shù)據(jù)進(jìn)行了數(shù)字濾波,鑒于滑動(dòng)平均濾波算法具有能夠良好抑制周期性干擾,平滑度高的特點(diǎn),這里選取滑動(dòng)平均濾波法。其原理是:將測(cè)量數(shù)據(jù)看成一個(gè)長(zhǎng)度為N的隊(duì)列,把每次的采樣新值放人隊(duì)尾,隊(duì)首的一個(gè)數(shù)據(jù)出列,其他數(shù)據(jù)前移一位,這樣隊(duì)列中始終有N個(gè)“最新”數(shù)據(jù),再將隊(duì)列中的N個(gè)數(shù)據(jù)進(jìn)行數(shù)學(xué)平均,從而得到新的濾波值。其數(shù)學(xué)表達(dá)式為:
?
式中:
?
為第n次采樣濾波后的輸出;Xn-i為未經(jīng)濾波的第n-i次采樣;N為滑動(dòng)平均項(xiàng)數(shù)。
?
數(shù)據(jù)采集過(guò)程如下:按測(cè)量鍵后,連續(xù)采樣1 min(1 min采樣10次),此次測(cè)量顯示這一分鐘內(nèi)采樣值的平均值,繼續(xù)采樣,此時(shí)顯示值為此次采樣值與前九次采樣值的平均值,即每6 s得一個(gè)數(shù)據(jù)值,LCD可以連續(xù)顯示。當(dāng)切換測(cè)量擋時(shí),延時(shí)采樣0.5s。
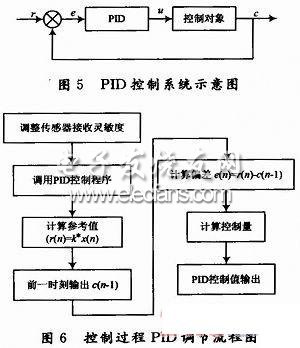
3.2 PID控制系統(tǒng)
為防止調(diào)節(jié)傳感器接收靈敏度時(shí)由于超調(diào)或者失調(diào)引起的振蕩,使儀器讀數(shù)能夠平緩上升或者下降,這里采用PID算法加以調(diào)節(jié),以對(duì)振蕩進(jìn)行抑制,在控制過(guò)程中采用智能判斷的方法使系統(tǒng)處于最優(yōu)狀態(tài)。PID調(diào)節(jié)器具有規(guī)律簡(jiǎn)單,運(yùn)行可靠,易于實(shí)現(xiàn)等特點(diǎn)。
圖5是PID控制的基本原理示意圖,其基本輸入輸出關(guān)系可表示為:
?
式中:μ(t)為控制器輸出;e(t)為控制器輸入的偏差信號(hào);e(t)=r(t)-c(t)。
?
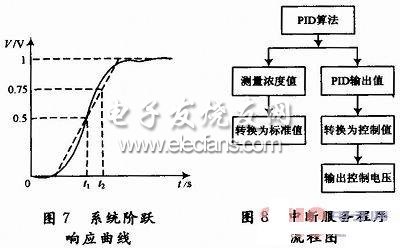
比例環(huán)節(jié)調(diào)整系統(tǒng)的開(kāi)環(huán)比例系數(shù),提高系統(tǒng)的穩(wěn)態(tài)精度,降低系統(tǒng)的惰性,加快響應(yīng)速度;積分環(huán)節(jié)可以提高系統(tǒng)的型別,消除或減小穩(wěn)態(tài)誤差,使系統(tǒng)的穩(wěn)態(tài)性能得到改善;微分控制使得系統(tǒng)的響應(yīng)速度變快,超調(diào)減小,振蕩減輕。PID控制過(guò)程調(diào)節(jié)流程如圖6所示。
3.3 PID參數(shù)的設(shè)定
PID控制參數(shù)的設(shè)定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容,它是根據(jù)被控對(duì)象的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小,確保其在系統(tǒng)受到擾動(dòng)后仍保持穩(wěn)定并將誤差保持在最小值。
3.3.1 PID參數(shù)的初始值
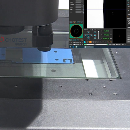
Ziegler Nichols方法是基于簡(jiǎn)單被控過(guò)程的Niquist曲線(xiàn)的臨界點(diǎn)計(jì)算PID參數(shù)初值,其整定準(zhǔn)則是要求系統(tǒng)的暫態(tài)過(guò)程衰減率為0.75,該算法簡(jiǎn)單,使用方便。本文采用4:1的衰減比性能準(zhǔn)則獲得PID參數(shù)的初始值。
設(shè)控制系統(tǒng)有一響應(yīng)曲線(xiàn),如圖7所示,給系統(tǒng)加一階躍輸入U(xiǎn),可用一階延時(shí)系統(tǒng)近似為:
?
式中:K為放大系數(shù);τ為滯后時(shí)間;T為時(shí)間常數(shù)。
設(shè)輸出值達(dá)到設(shè)定值的50%和75%時(shí)所用的時(shí)間分別為:t1和t2,則PID參數(shù)的初始值可表示為比例系數(shù)Kp=1.2U/(RL),積分時(shí)間常數(shù)TI=2L,微分時(shí)間常數(shù)TD=0.5L。其中:斜率R=(0.75-0.5)V/(t2-t1),滯后L=t1-(2V0-4V1)(t2-t1)/V。
?




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論